
倾斜摄影定位定姿方法及系统和飞机定位定姿方法及系统.pdf

是来****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

倾斜摄影定位定姿方法及系统和飞机定位定姿方法及系统.pdf
本发明涉及倾斜摄影定位定姿方法及系统和飞机定位定姿方法及系统,包括摄影设备以预设倾斜角度拍摄待定位定姿物体,获取包含待定位定姿物体的成像的图像;调整待定位定姿物体的三维模型的位姿参数,获取三维模型在图像对应的像幅内的投影的二维轮廓与成像的二维轮廓吻合时三维模型的位姿参数;将吻合时三维模型的位姿参数作为待定位定姿物体的位姿参数。本发明能高精度实现待定位定姿物体的位姿参数测量,并且仅需采集单幅图像,操作简单,能够有效实现待定位定姿物体只会至多出现在一个摄影设备的视场范围之内的位姿参数测量。

SWDC-5倾斜像片定位定姿方法研究.docx
SWDC-5倾斜像片定位定姿方法研究随着遥感技术的发展,倾斜摄影技术逐渐成为高精度三维测绘的重要手段。倾斜像片的定位定姿是倾斜摄影中的一个重要问题,其影响着后续的三维测量和制图处理。本文就SWDC-5倾斜像片的定位定姿方法进行研究,以期提高倾斜摄影的定位精度和定姿精度,为地图制图和城市规划等领域的应用提供更准确的数据。一、SWDC-5倾斜像片的特点SWDC-5倾斜像片是一种高分辨率、高精度的遥感图像,具有以下特点:1.高分辨率:SWDC-5倾斜像片拍摄的图像分辨率高达24毫米,能够捕捉到更细节的地物信息,
多视角下的目标轮廓定位定姿平差方法及系统.pdf
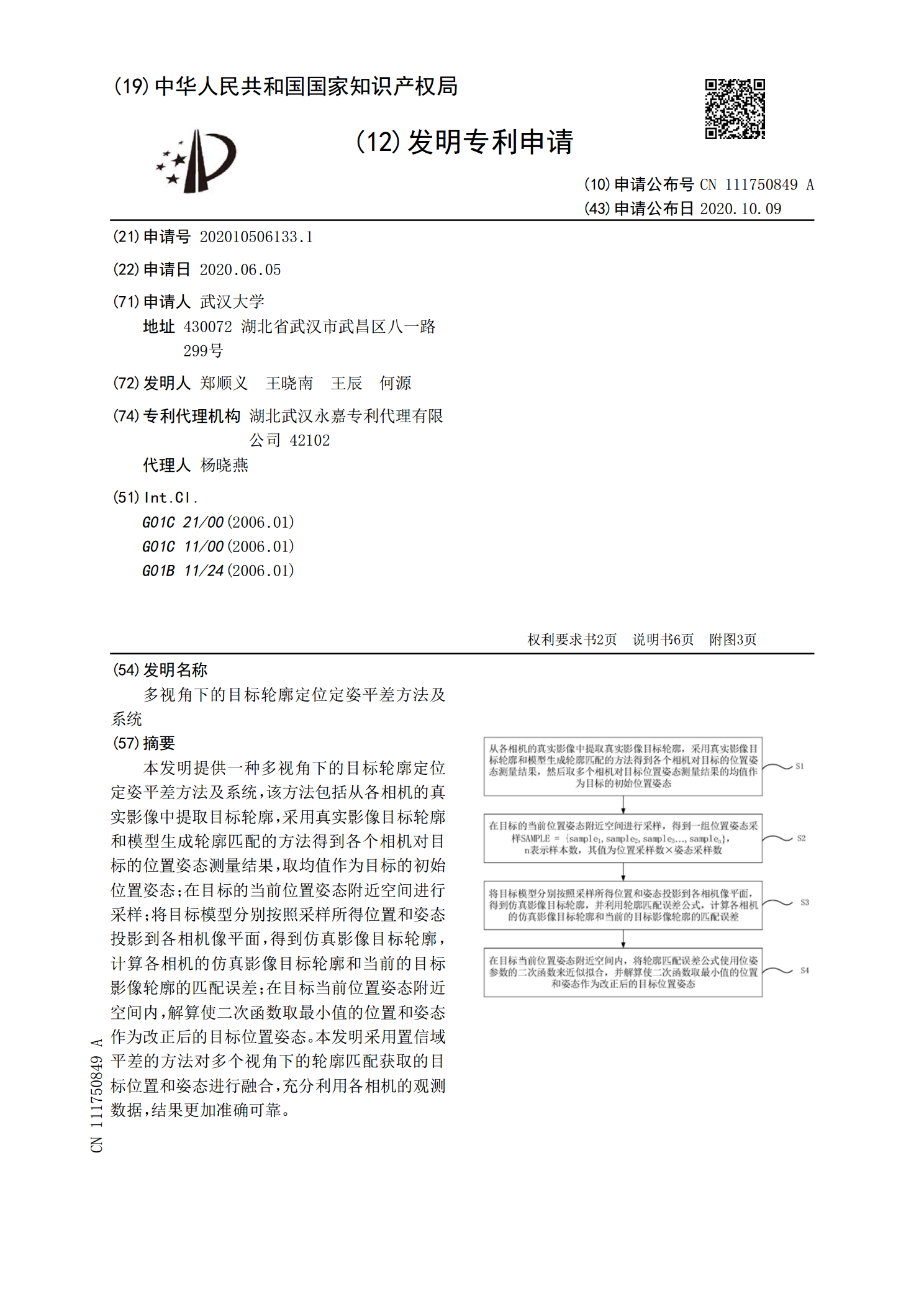
本发明提供一种多视角下的目标轮廓定位定姿平差方法及系统,该方法包括从各相机的真实影像中提取目标轮廓,采用真实影像目标轮廓和模型生成轮廓匹配的方法得到各个相机对目标的位置姿态测量结果,取均值作为目标的初始位置姿态;在目标的当前位置姿态附近空间进行采样;将目标模型分别按照采样所得位置和姿态投影到各相机像平面,得到仿真影像目标轮廓,计算各相机的仿真影像目标轮廓和当前的目标影像轮廓的匹配误差;在目标当前位置姿态附近空间内,解算使二次函数取最小值的位置和姿态作为改正后的目标位置姿态。本发明采用置信域平差的方法对多个

UWBINS紧组合的室内定位定姿方法.docx
UWBINS紧组合的室内定位定姿方法摘要:室内定位与定姿技术在日常生活中的应用越来越广泛。为了解决室内环境中的位置和方向信息获取问题,UWBINS(Ultra-widebandIndoorNavigationSystem)紧组合的室内定位定姿方法被提出。本文介绍了UWBINS系统的工作原理和关键技术,包括基站和标签的设计、UWB超宽频信号的传输和接收、多传感器融合系统等。通过对UWBINS系统的实验和测试结果进行分析,验证了该方法的高精度和可靠性。最后,本文还对UWBINS的局限性和未来发展方向进行了展望

GPS定位定姿系统研究的任务书.docx
GPS定位定姿系统研究的任务书任务名称:GPS定位定姿系统研究任务背景:随着科技迅速发展,GPS技术已被广泛应用于精确定位和导航控制等领域。在现代军事技术中,GPS技术也扮演着重要的角色。为了满足军事领域的需求,提升作战能力和保障军队的安全,研究GPS定位定姿系统已成为当务之急。任务目标:本任务旨在研究GPS定位定姿系统的设计原理和算法,开发出一种可靠、高精度的系统,实现精准、快速的定位和定姿。任务内容:1.调研GPS定位定姿系统的现状和发展趋势;2.研究GPS定位原理和定姿算法,包括粗略对准、精确对准等