
一种倒车轨迹追踪方法、装置、电子设备及存储介质.pdf

努力****弘毅

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种倒车轨迹追踪方法、装置、电子设备及存储介质.pdf
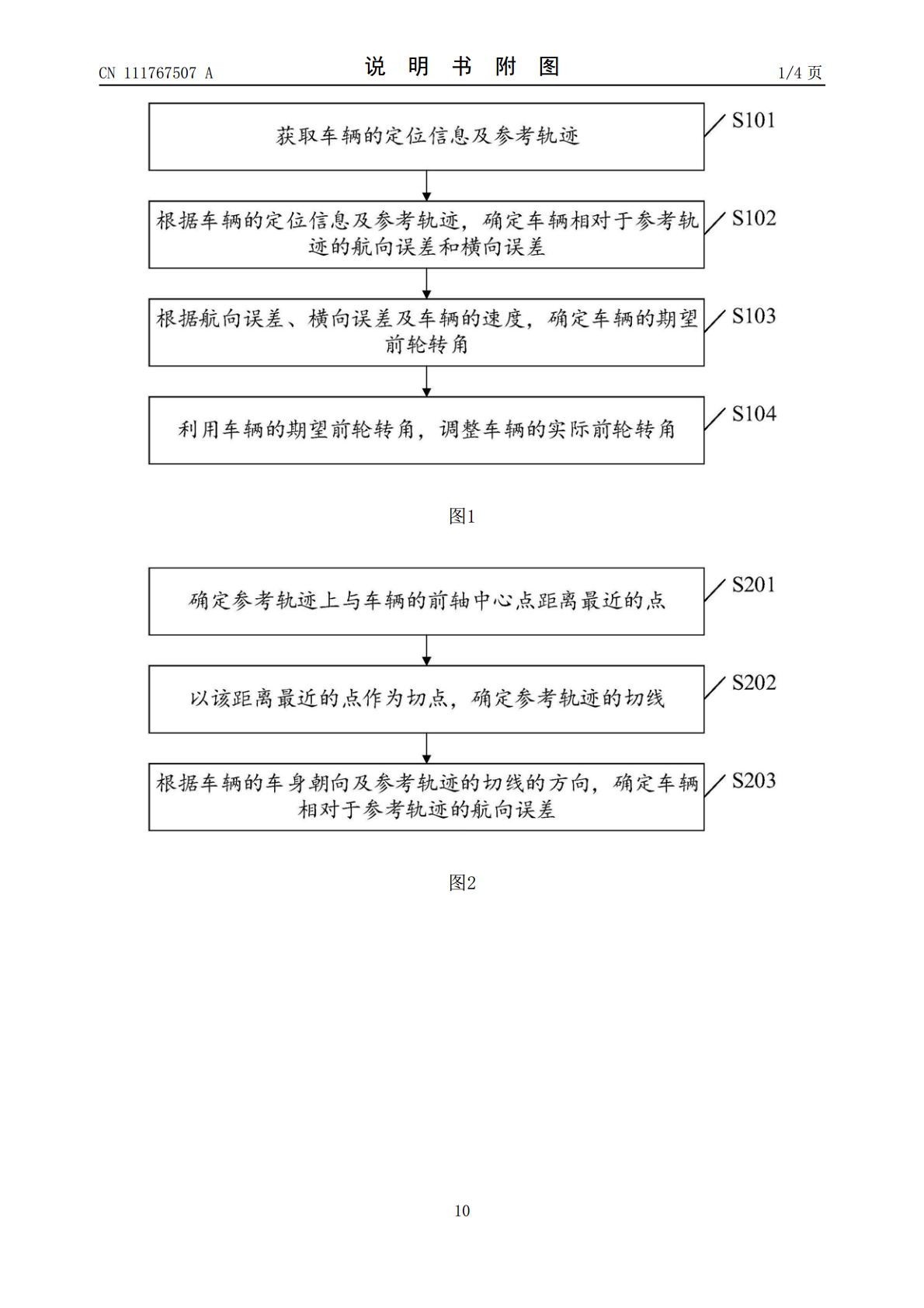
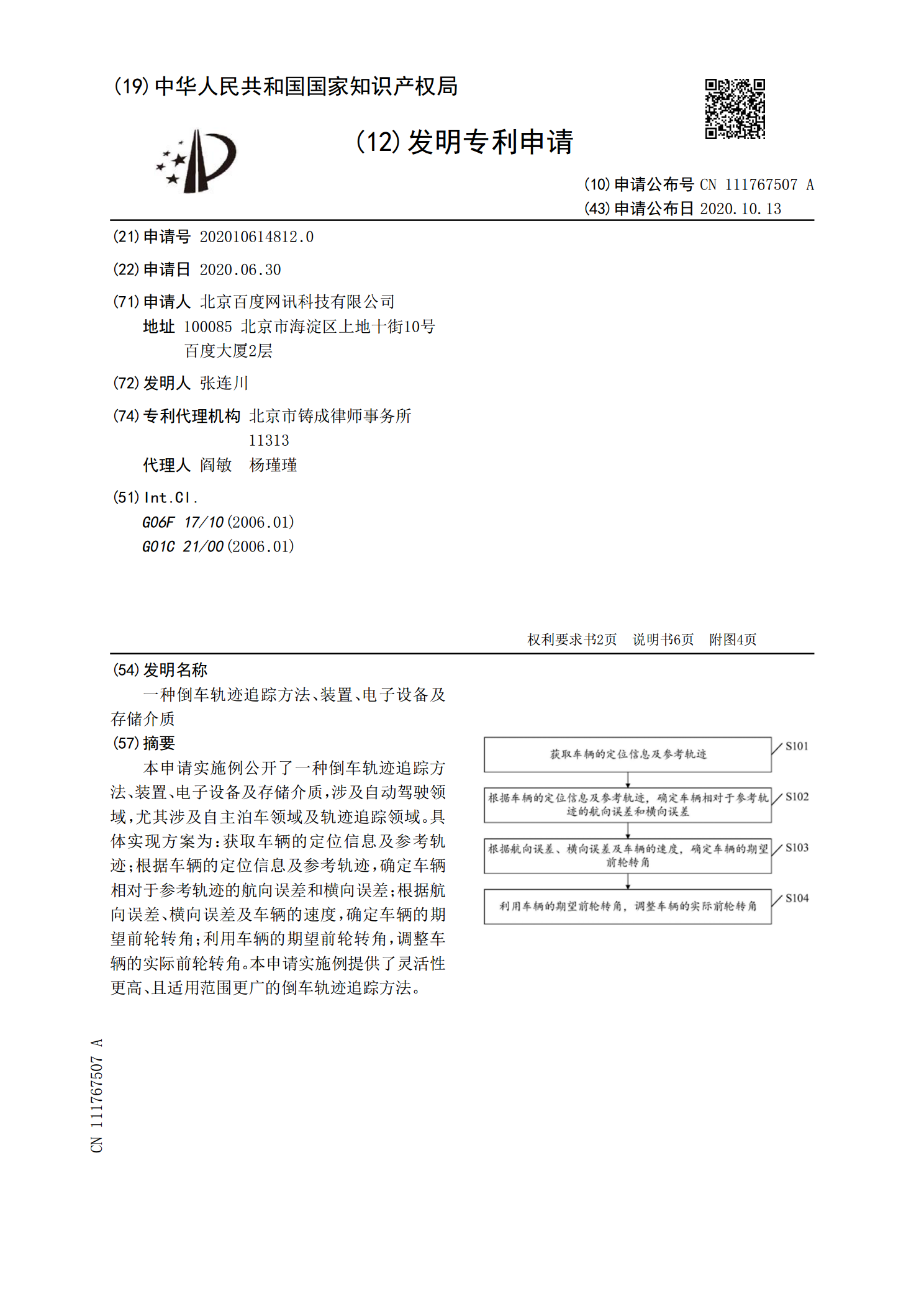
本申请实施例公开了一种倒车轨迹追踪方法、装置、电子设备及存储介质,涉及自动驾驶领域,尤其涉及自主泊车领域及轨迹追踪领域。具体实现方案为:获取车辆的定位信息及参考轨迹;根据车辆的定位信息及参考轨迹,确定车辆相对于参考轨迹的航向误差和横向误差;根据航向误差、横向误差及车辆的速度,确定车辆的期望前轮转角;利用车辆的期望前轮转角,调整车辆的实际前轮转角。本申请实施例提供了灵活性更高、且适用范围更广的倒车轨迹追踪方法。
目标轨迹追踪方法及装置、存储介质、电子设备.pdf
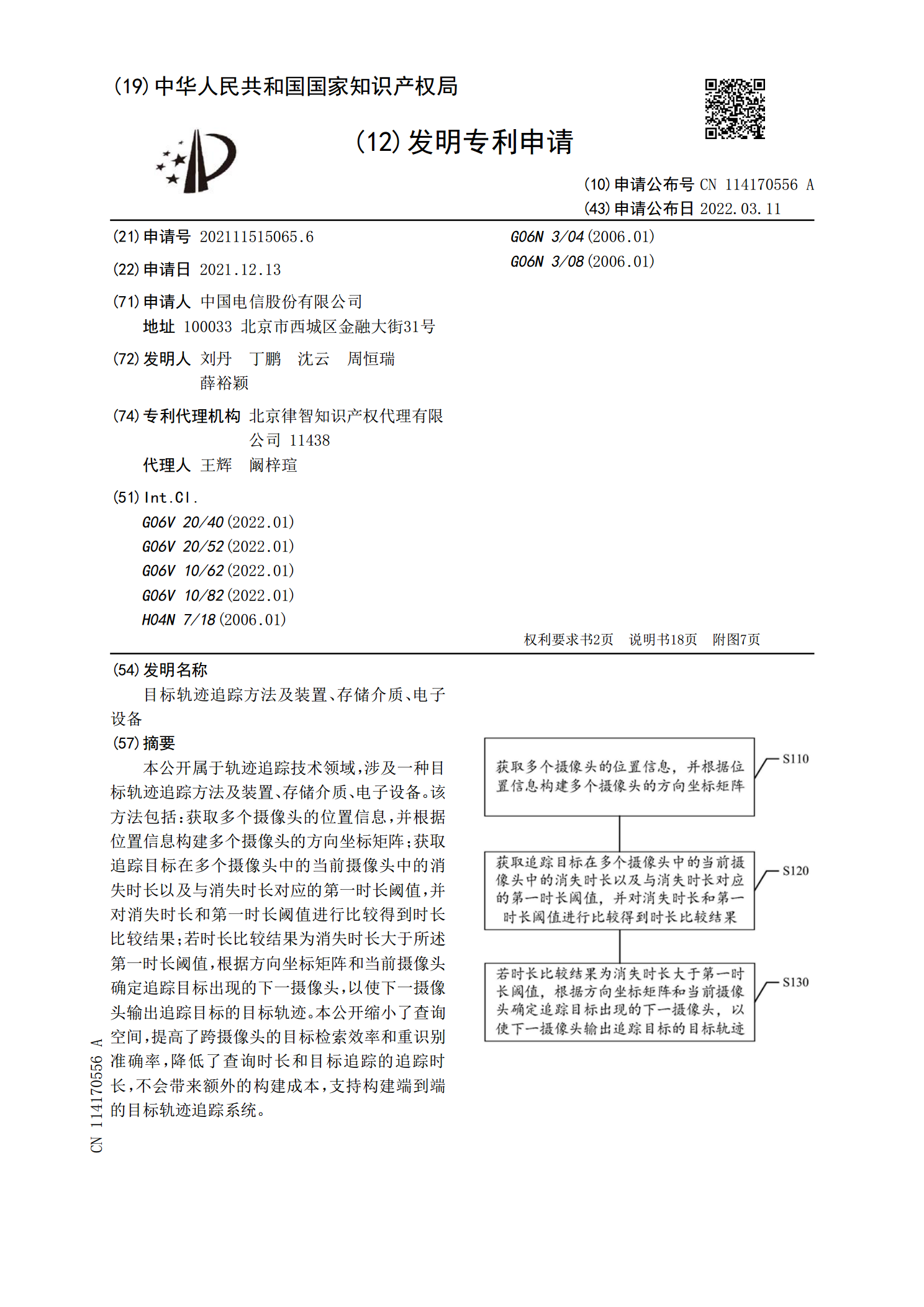
本公开属于轨迹追踪技术领域,涉及一种目标轨迹追踪方法及装置、存储介质、电子设备。该方法包括:获取多个摄像头的位置信息,并根据位置信息构建多个摄像头的方向坐标矩阵;获取追踪目标在多个摄像头中的当前摄像头中的消失时长以及与消失时长对应的第一时长阈值,并对消失时长和第一时长阈值进行比较得到时长比较结果;若时长比较结果为消失时长大于所述第一时长阈值,根据方向坐标矩阵和当前摄像头确定追踪目标出现的下一摄像头,以使下一摄像头输出追踪目标的目标轨迹。本公开缩小了查询空间,提高了跨摄像头的目标检索效率和重识别准确率,降低
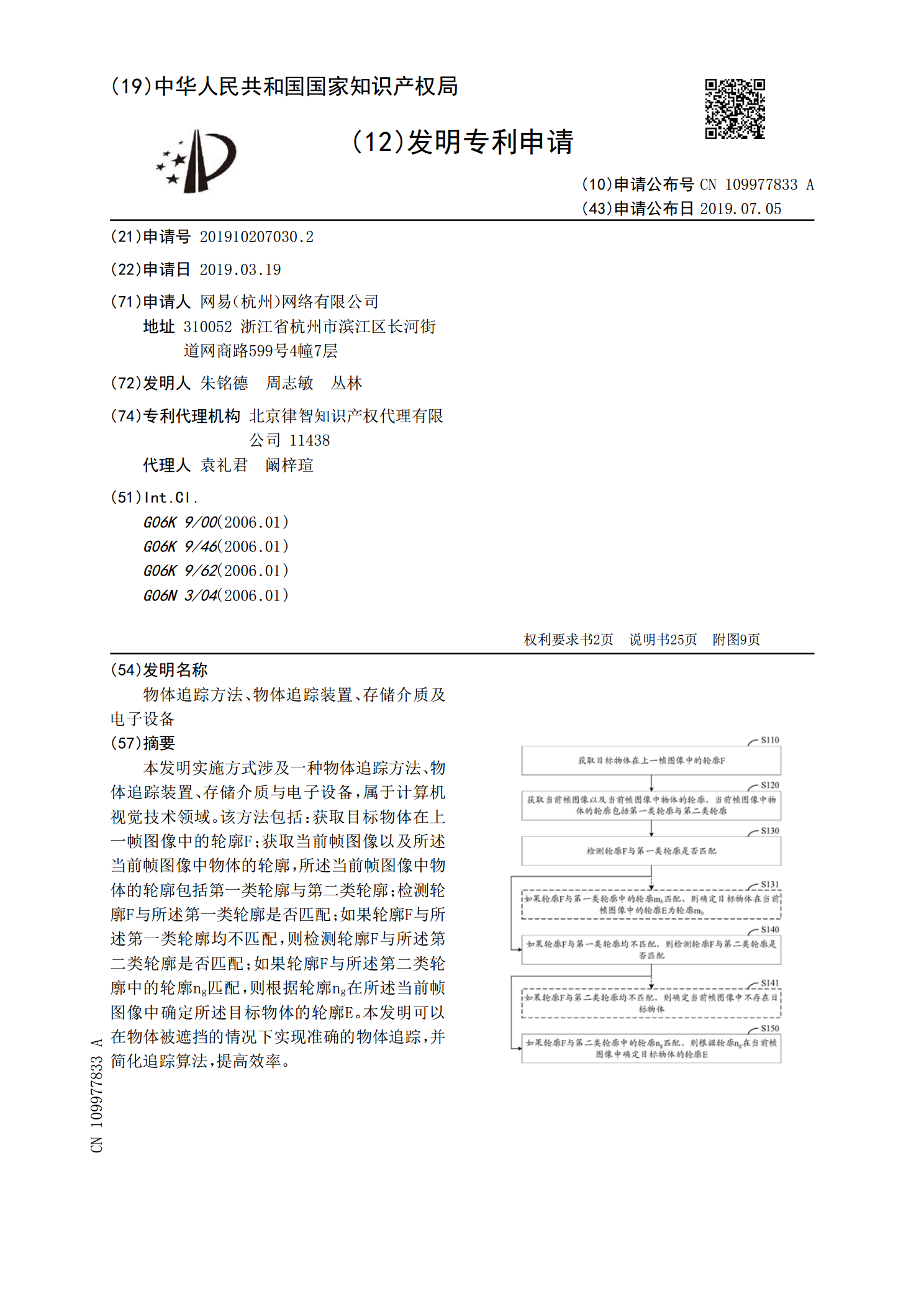
物体追踪方法、物体追踪装置、存储介质及电子设备.pdf
本发明实施方式涉及一种物体追踪方法、物体追踪装置、存储介质与电子设备,属于计算机视觉技术领域。该方法包括:获取目标物体在上一帧图像中的轮廓F;获取当前帧图像以及所述当前帧图像中物体的轮廓,所述当前帧图像中物体的轮廓包括第一类轮廓与第二类轮廓;检测轮廓F与所述第一类轮廓是否匹配;如果轮廓F与所述第一类轮廓均不匹配,则检测轮廓F与所述第二类轮廓是否匹配;如果轮廓F与所述第二类轮廓中的轮廓n
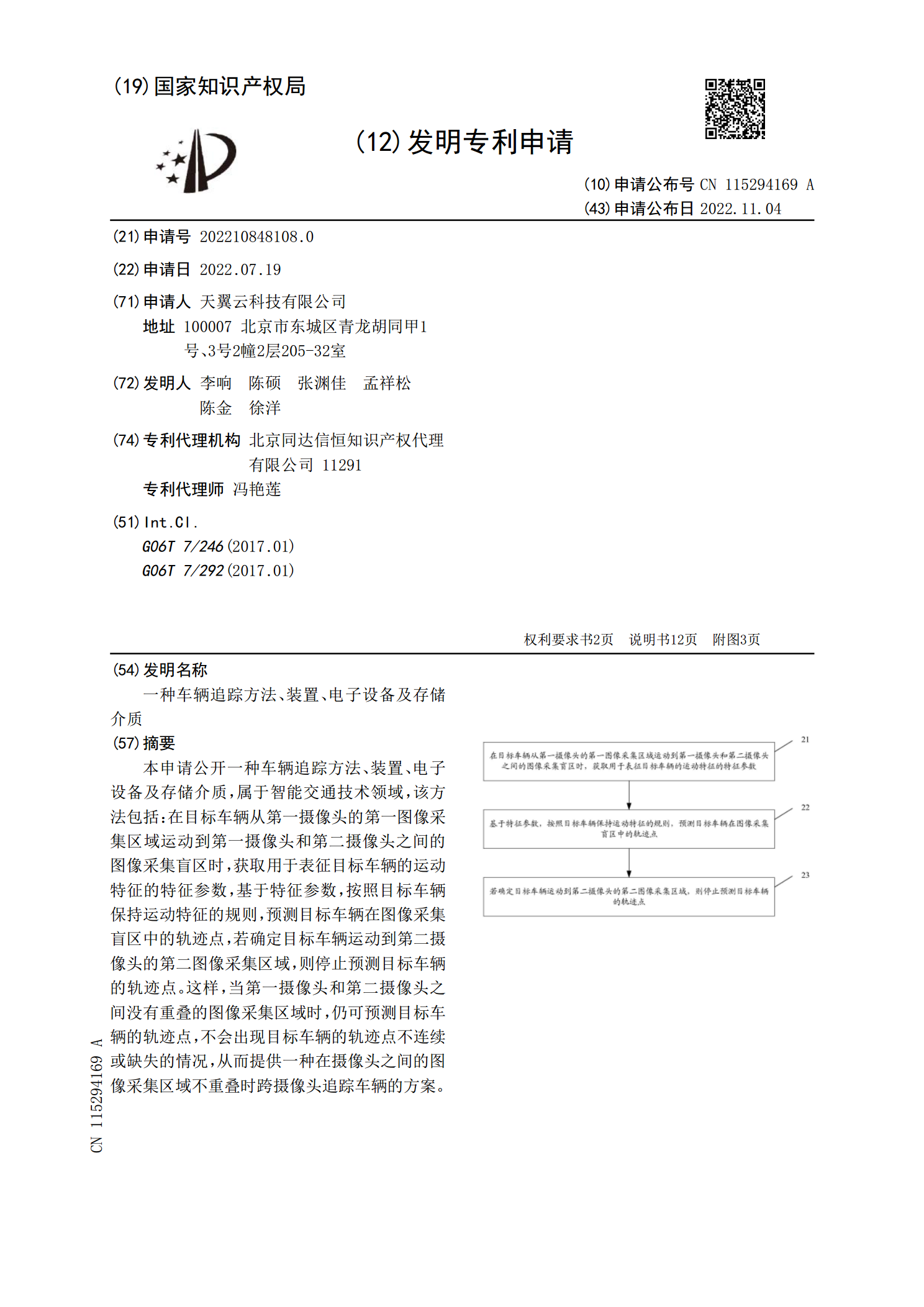
一种车辆追踪方法、装置、电子设备及存储介质.pdf
本申请公开一种车辆追踪方法、装置、电子设备及存储介质,属于智能交通技术领域,该方法包括:在目标车辆从第一摄像头的第一图像采集区域运动到第一摄像头和第二摄像头之间的图像采集盲区时,获取用于表征目标车辆的运动特征的特征参数,基于特征参数,按照目标车辆保持运动特征的规则,预测目标车辆在图像采集盲区中的轨迹点,若确定目标车辆运动到第二摄像头的第二图像采集区域,则停止预测目标车辆的轨迹点。这样,当第一摄像头和第二摄像头之间没有重叠的图像采集区域时,仍可预测目标车辆的轨迹点,不会出现目标车辆的轨迹点不连续或缺失的情况

一种轨迹预测方法、装置、电子设备及存储介质.pdf
本申请公开一种轨迹预测方法、装置、电子设备及存储介质,属于健康养老技术领域,该方法包括:获取目标对象在当前周期内的轨迹数据,轨迹数据包括目标对象达到的地点和地点的到达次序,对轨迹数据进行特征分析,得到轨迹特征,基于权重参数对轨迹特征进行转换处理,得到转换特征,基于转换特征,对目标对象前往各候选地点的兴趣进行分析,基于兴趣分析结果,确定目标对象将要前往的地点,权重参数是对目标对象在历史周期内轨迹数据的轨迹特征与转换特征之间的关系进行学习得到的。这样,可以提前获知目标对象将要前往的地点,便于管理者掌握目标对象