
一种AGV智能移动底盘.pdf

是你****松呀

1/9
2/9

3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种AGV智能移动底盘.pdf
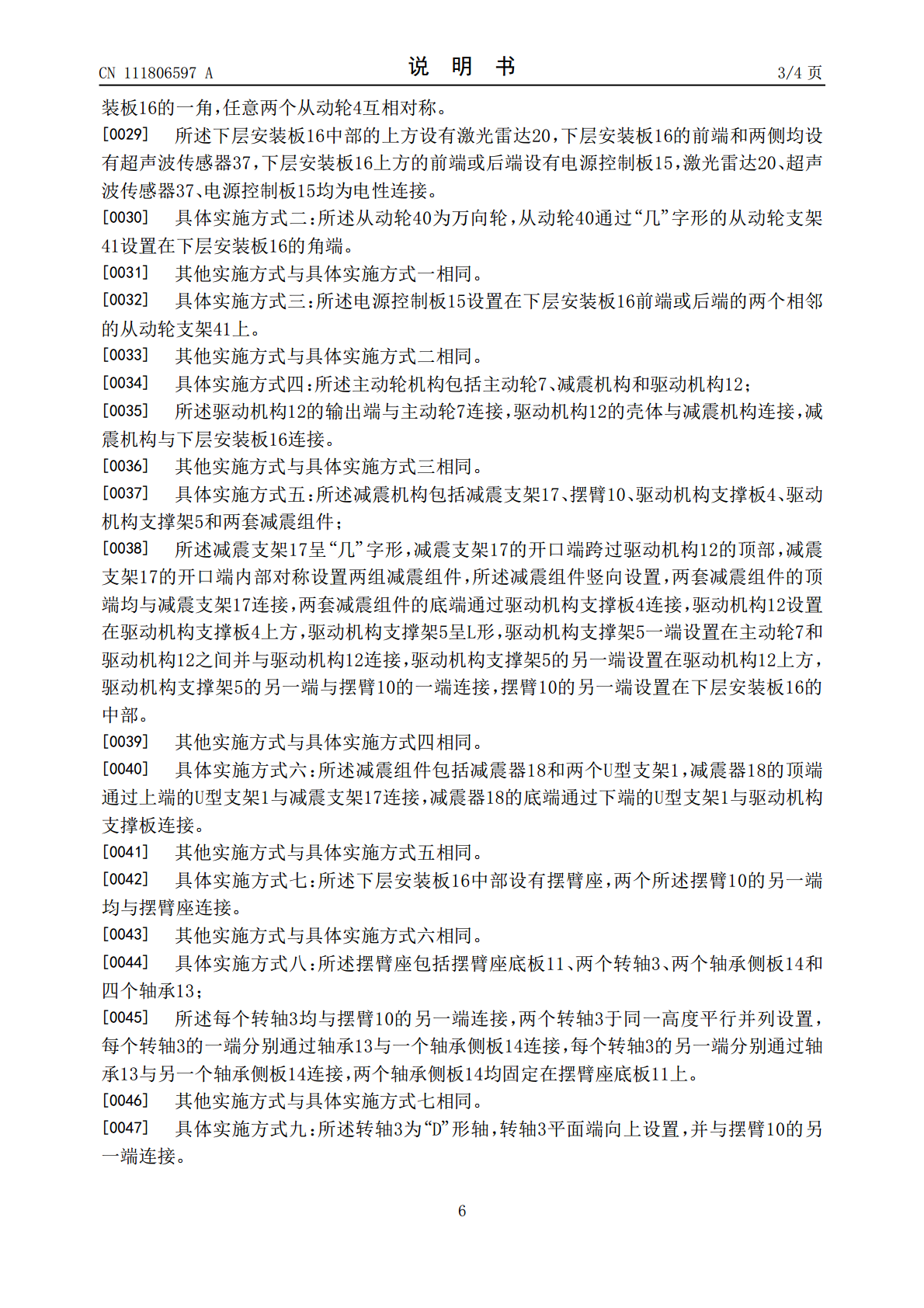
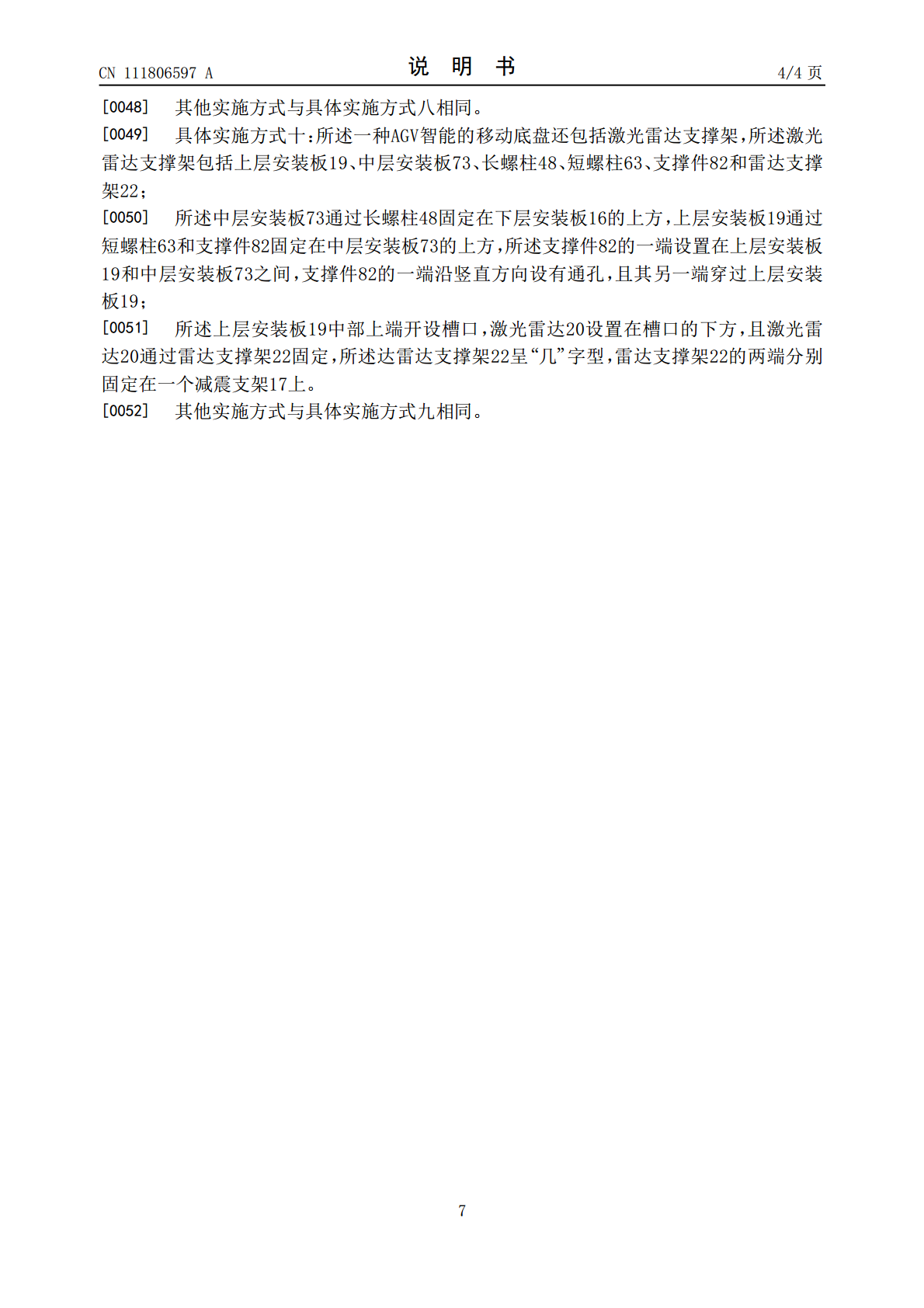
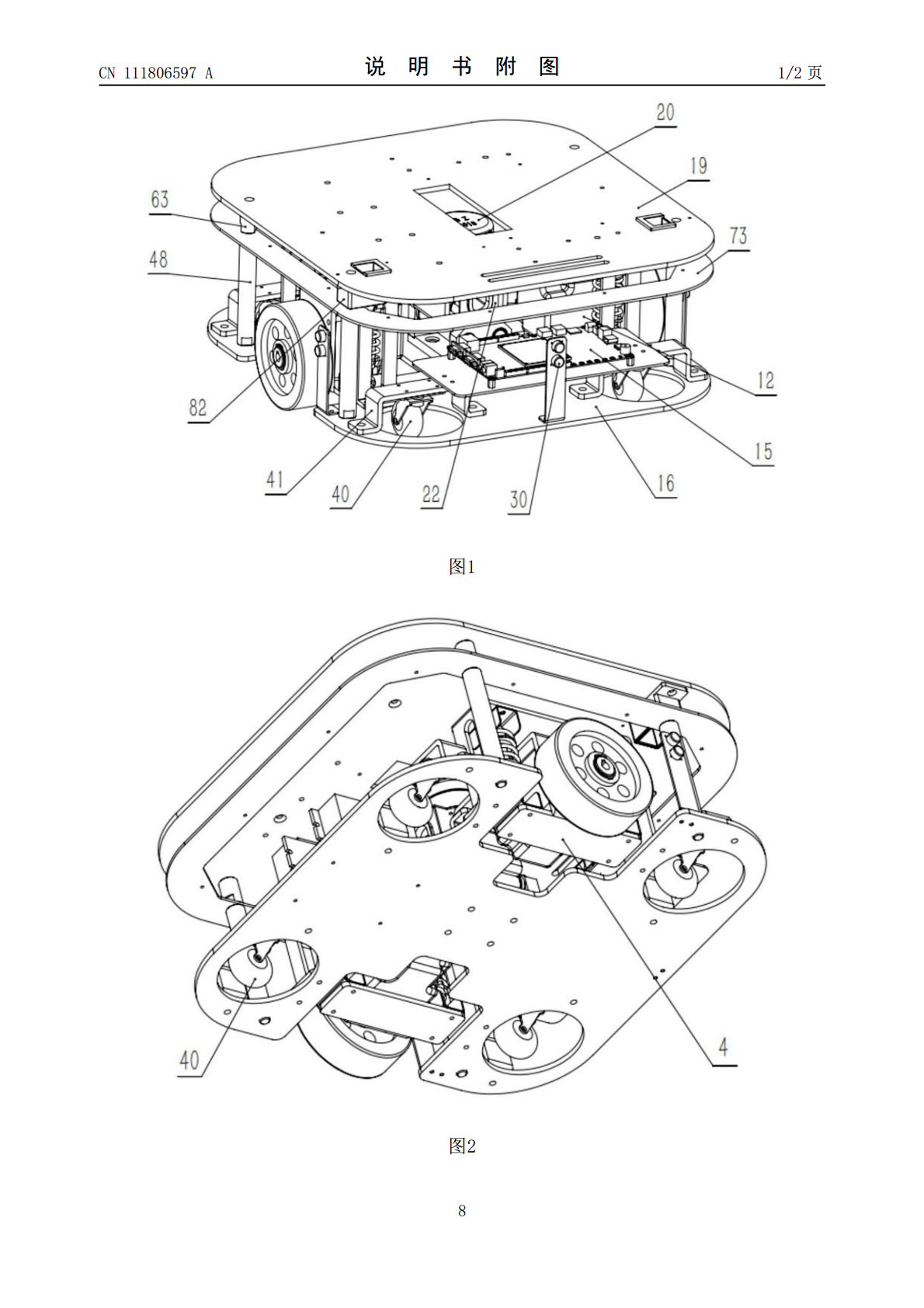
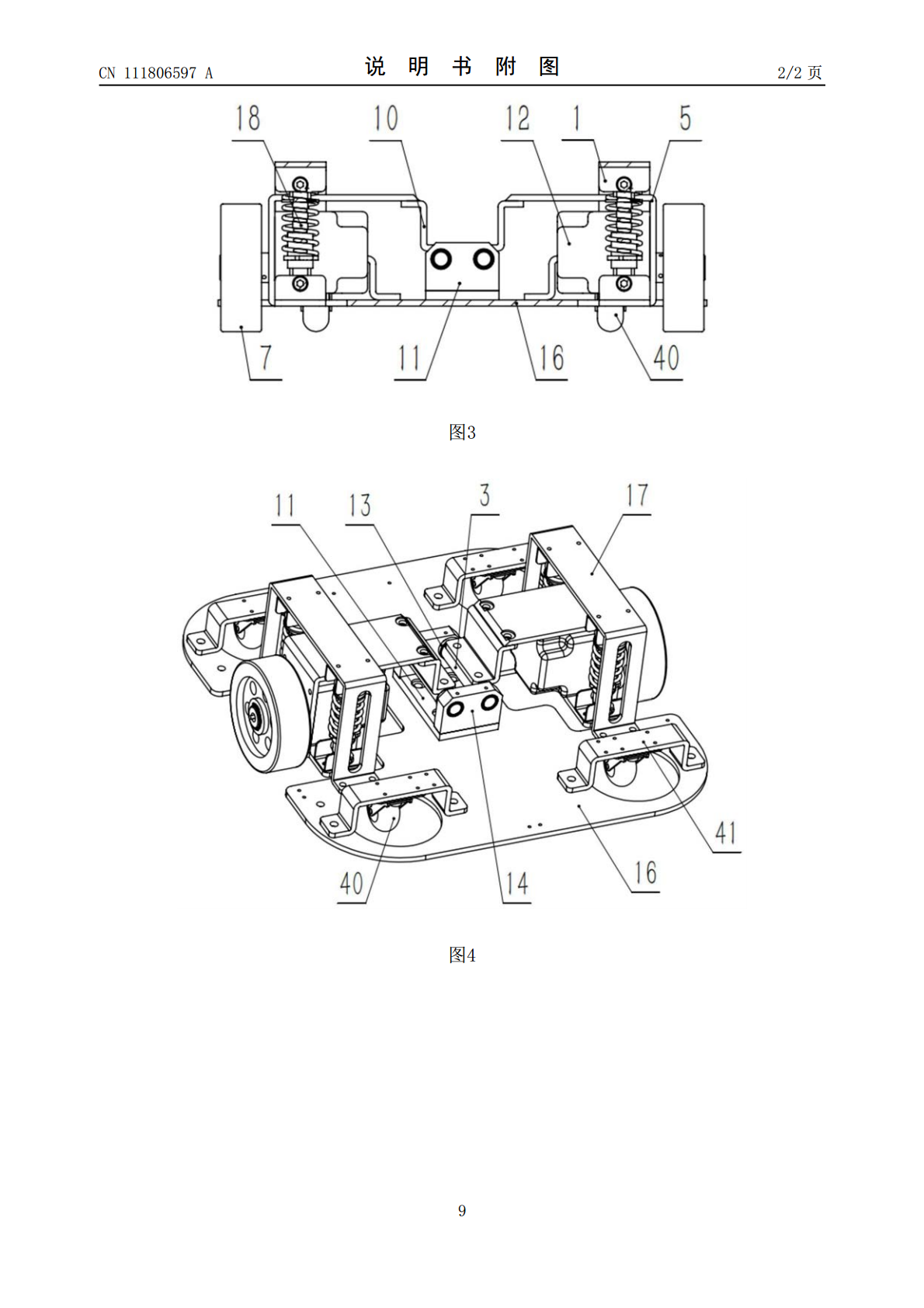
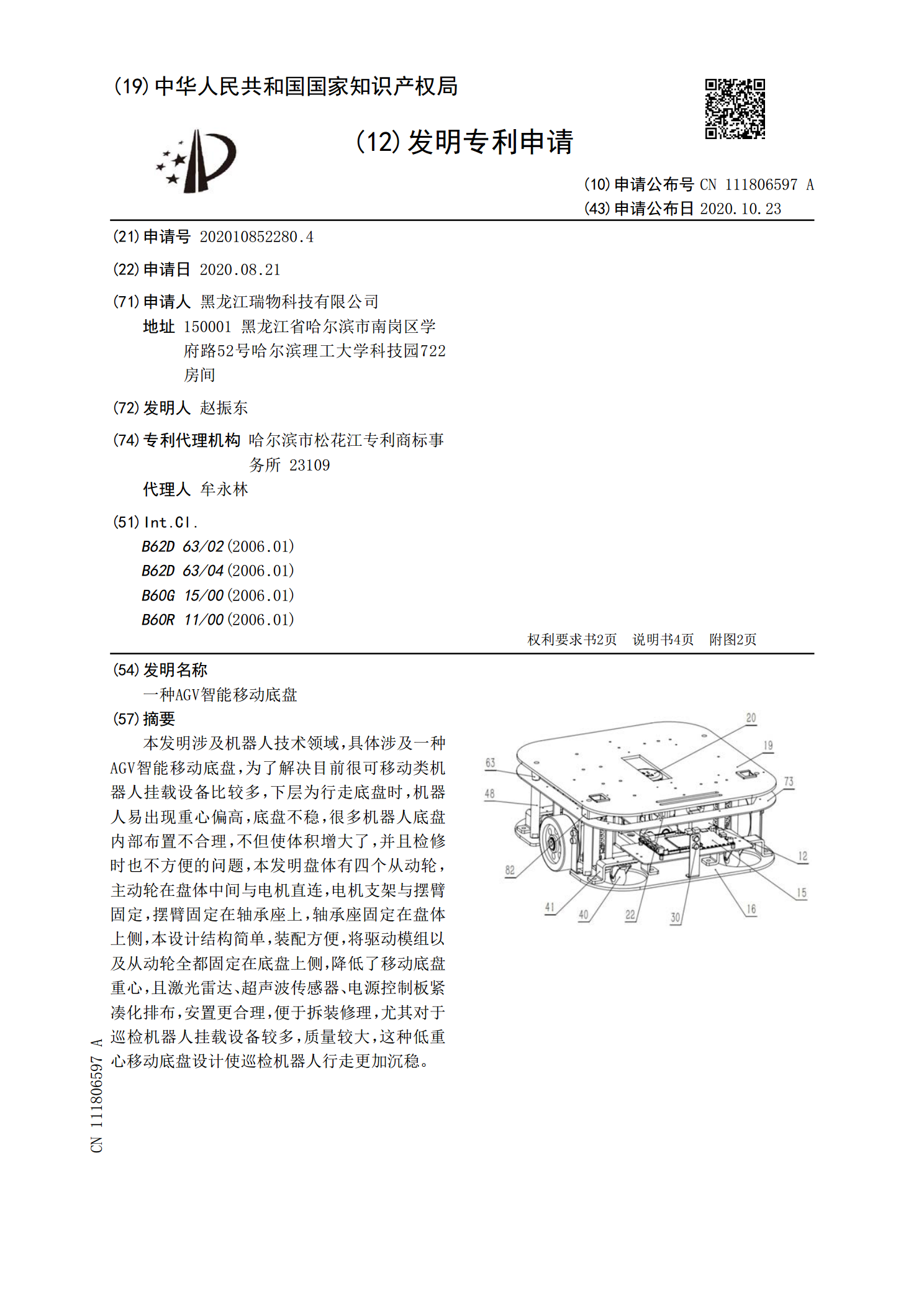
本发明涉及机器人技术领域,具体涉及一种AGV智能移动底盘,为了解决目前很可移动类机器人挂载设备比较多,下层为行走底盘时,机器人易出现重心偏高,底盘不稳,很多机器人底盘内部布置不合理,不但使体积增大了,并且检修时也不方便的问题,本发明盘体有四个从动轮,主动轮在盘体中间与电机直连,电机支架与摆臂固定,摆臂固定在轴承座上,轴承座固定在盘体上侧,本设计结构简单,装配方便,将驱动模组以及从动轮全都固定在底盘上侧,降低了移动底盘重心,且激光雷达、超声波传感器、电源控制板紧凑化排布,安置更合理,便于拆装修理,尤其对于巡
一种AGV底盘及AGV小车.pdf
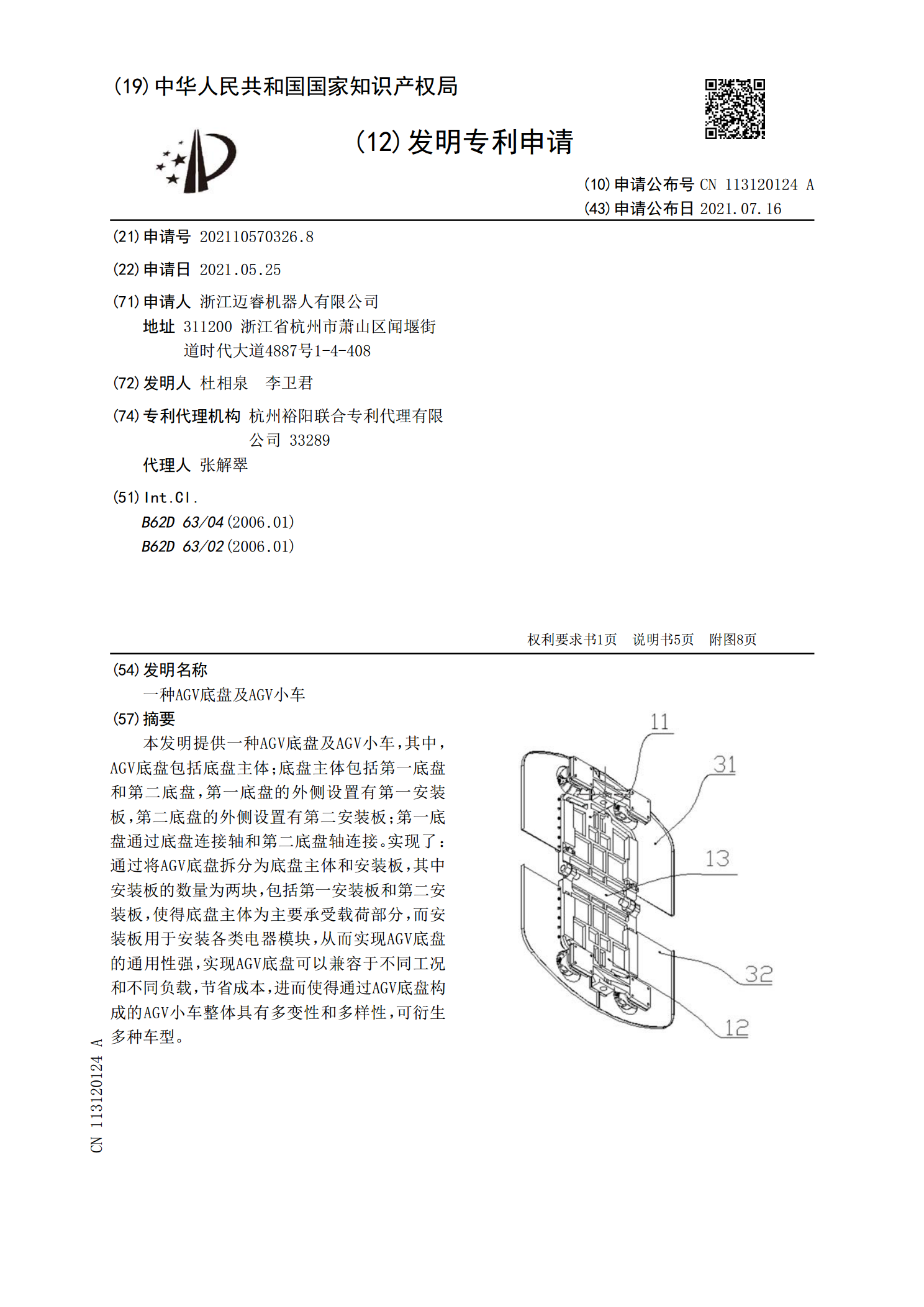
本发明提供一种AGV底盘及AGV小车,其中,AGV底盘包括底盘主体;底盘主体包括第一底盘和第二底盘,第一底盘的外侧设置有第一安装板,第二底盘的外侧设置有第二安装板;第一底盘通过底盘连接轴和第二底盘轴连接。实现了:通过将AGV底盘拆分为底盘主体和安装板,其中安装板的数量为两块,包括第一安装板和第二安装板,使得底盘主体为主要承受载荷部分,而安装板用于安装各类电器模块,从而实现AGV底盘的通用性强,实现AGV底盘可以兼容于不同工况和不同负载,节省成本,进而使得通过AGV底盘构成的AGV小车整体具有多变性和多样性

一种AGV底盘.pdf
一种AGV底盘,属于仓储物流运输技术领域,所述AGV底盘,包括底板、底板上设置的驱动轮模块和从动轮模块,其特征在于,所述底板中部设置有与驱动轮模块配合的第一通孔,底板两端设置有与从动轮模块配合的第二通孔,所述驱动轮模块包括驱动轮本体、将驱动轮本体安装在第一通孔内的减震支架和减震支架上固定的使驱动轮本体转动的电机,本发明的有益效果是,所述AGV底盘结构简单紧凑、安装方便快捷、循磁精度高、而且能顺利平稳越障,实现了AGV驱动的微型化和灵活性,能更好的利用现有场地,使得搬运更轻松、更方便。

智能移动小车AGV简介.ppt
第七章自动导引车7.1.1AGV的发展现状20世纪50年代中期,Barret公司设计出无人驾驶卡车,也就是AGV的最早雏形。后来,美国物料搬运研究所将其定义为AGV,它是可充电的无人驾驶小车,可根据路径和定位情况编程,而且行走的路线可以改变和扩展。据报导,到1960年时,欧洲就安装了各种型号不同水平的自动搬运车系统,使用了13,000多台AGV。1959年AGV开始用于仓库自动化和工厂作业中。日本也从这时开始引进AGV技术。日本是使用这种车辆最多的国家,在20世纪80年代末,拥有各种类型的自动搬运车超过一

智能移动小车AGV简介.ppt
第七章自动导引车7.1.1AGV的发展现状20世纪50年代中期,Barret公司设计出无人驾驶卡车,也就是AGV的最早雏形。后来,美国物料搬运研究所将其定义为AGV,它是可充电的无人驾驶小车,可根据路径和定位情况编程,而且行走的路线可以改变和扩展。据报导,到1960年时,欧洲就安装了各种型号不同水平的自动搬运车系统,使用了13,000多台AGV。1959年AGV开始用于仓库自动化和工厂作业中。日本也从这时开始引进AGV技术。日本是使用这种车辆最多的国家,在20世纪80年代末,拥有各种类型的自动搬运车超过一