
智能移动小车AGV简介.ppt

努力****甲寅


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共49页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

智能移动小车AGV简介.ppt
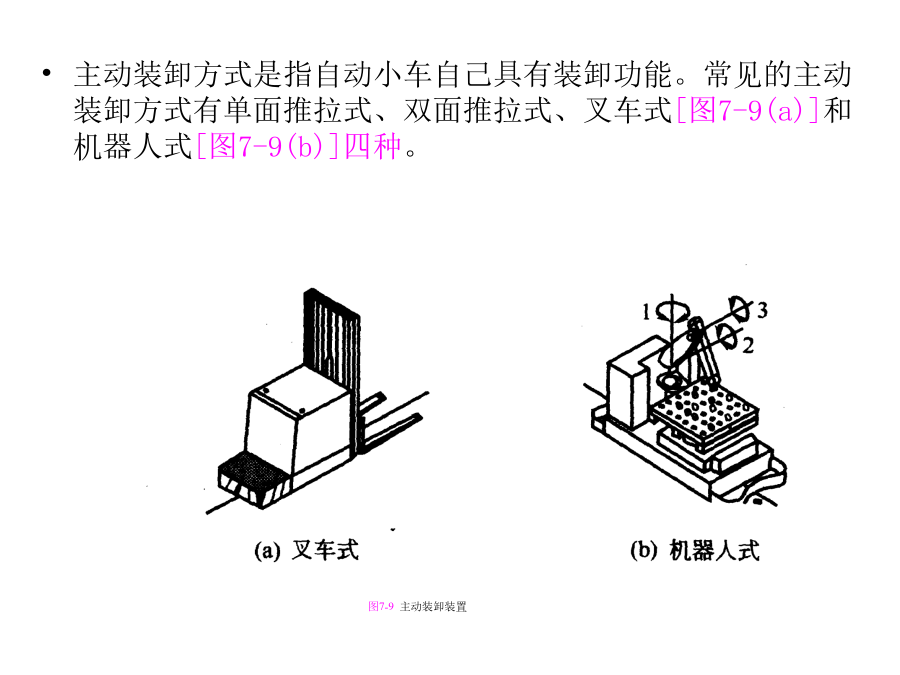
第七章自动导引车7.1.1AGV的发展现状20世纪50年代中期,Barret公司设计出无人驾驶卡车,也就是AGV的最早雏形。后来,美国物料搬运研究所将其定义为AGV,它是可充电的无人驾驶小车,可根据路径和定位情况编程,而且行走的路线可以改变和扩展。据报导,到1960年时,欧洲就安装了各种型号不同水平的自动搬运车系统,使用了13,000多台AGV。1959年AGV开始用于仓库自动化和工厂作业中。日本也从这时开始引进AGV技术。日本是使用这种车辆最多的国家,在20世纪80年代末,拥有各种类型的自动搬运车超过一

智能移动小车AGV简介.ppt
第七章自动导引车7.1.1AGV的发展现状20世纪50年代中期,Barret公司设计出无人驾驶卡车,也就是AGV的最早雏形。后来,美国物料搬运研究所将其定义为AGV,它是可充电的无人驾驶小车,可根据路径和定位情况编程,而且行走的路线可以改变和扩展。据报导,到1960年时,欧洲就安装了各种型号不同水平的自动搬运车系统,使用了13,000多台AGV。1959年AGV开始用于仓库自动化和工厂作业中。日本也从这时开始引进AGV技术。日本是使用这种车辆最多的国家,在20世纪80年代末,拥有各种类型的自动搬运车超过一

智能移动小车AGV简介ppt课件.ppt
第七章自动导引车7.1.1AGV的发展现状20世纪50年代中期,Barret公司设计出无人驾驶卡车,也就是AGV的最早雏形。后来,美国物料搬运研究所将其定义为AGV,它是可充电的无人驾驶小车,可根据路径和定位情况编程,而且行走的路线可以改变和扩展。据报导,到1960年时,欧洲就安装了各种型号不同水平的自动搬运车系统,使用了13,000多台AGV。1959年AGV开始用于仓库自动化和工厂作业中。日本也从这时开始引进AGV技术。日本是使用这种车辆最多的国家,在20世纪80年代末,拥有各种类型的自动搬运车超过一
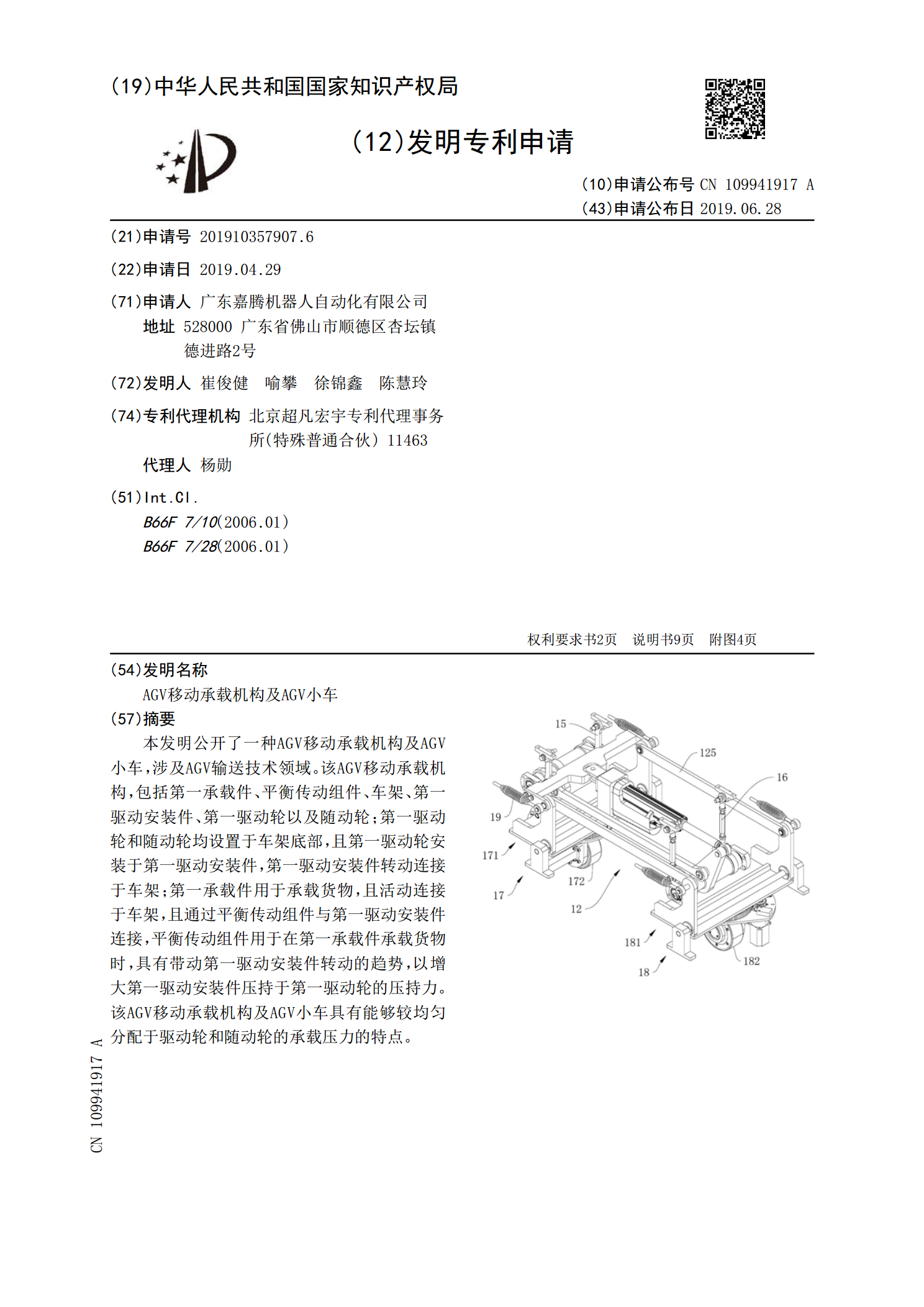
AGV移动承载机构及AGV小车.pdf
本发明公开了一种AGV移动承载机构及AGV小车,涉及AGV输送技术领域。该AGV移动承载机构,包括第一承载件、平衡传动组件、车架、第一驱动安装件、第一驱动轮以及随动轮;第一驱动轮和随动轮均设置于车架底部,且第一驱动轮安装于第一驱动安装件,第一驱动安装件转动连接于车架;第一承载件用于承载货物,且活动连接于车架,且通过平衡传动组件与第一驱动安装件连接,平衡传动组件用于在第一承载件承载货物时,具有带动第一驱动安装件转动的趋势,以增大第一驱动安装件压持于第一驱动轮的压持力。该AGV移动承载机构及AGV小车具有能够
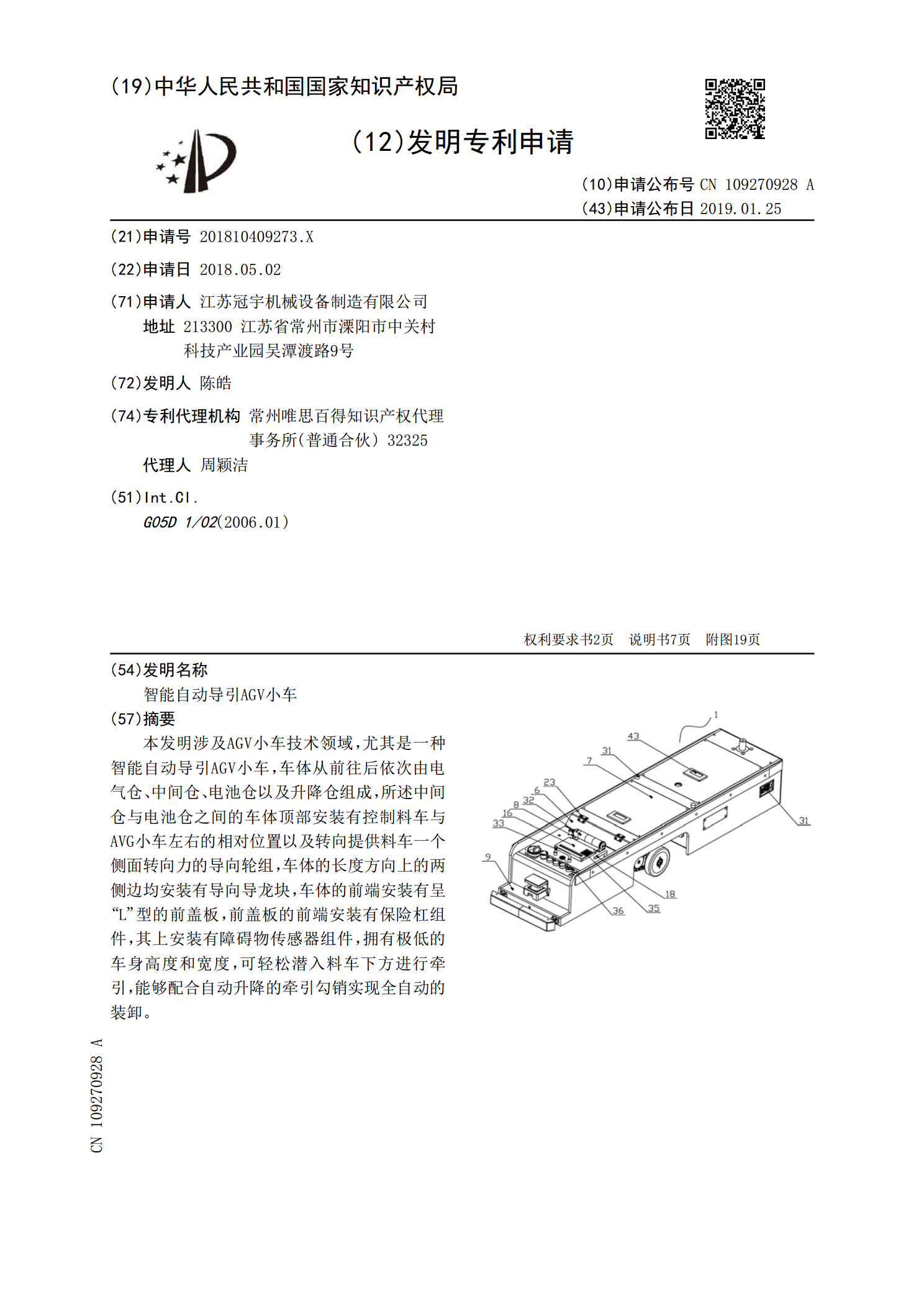
智能自动导引AGV小车.pdf
本发明涉及AGV小车技术领域,尤其是一种智能自动导引AGV小车,车体从前往后依次由电气仓、中间仓、电池仓以及升降仓组成,所述中间仓与电池仓之间的车体顶部安装有控制料车与AVG小车左右的相对位置以及转向提供料车一个侧面转向力的导向轮组,车体的长度方向上的两侧边均安装有导向导龙块,车体的前端安装有呈“L”型的前盖板,前盖板的前端安装有保险杠组件,其上安装有障碍物传感器组件,拥有极低的车身高度和宽度,可轻松潜入料车下方进行牵引,能够配合自动升降的牵引勾销实现全自动的装卸。