
基于车轮传感器检测阵的车辆作业情况检测方法.pdf

一条****彩妍


1/8
2/8

3/8

4/8

5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于车轮传感器检测阵的车辆作业情况检测方法.pdf
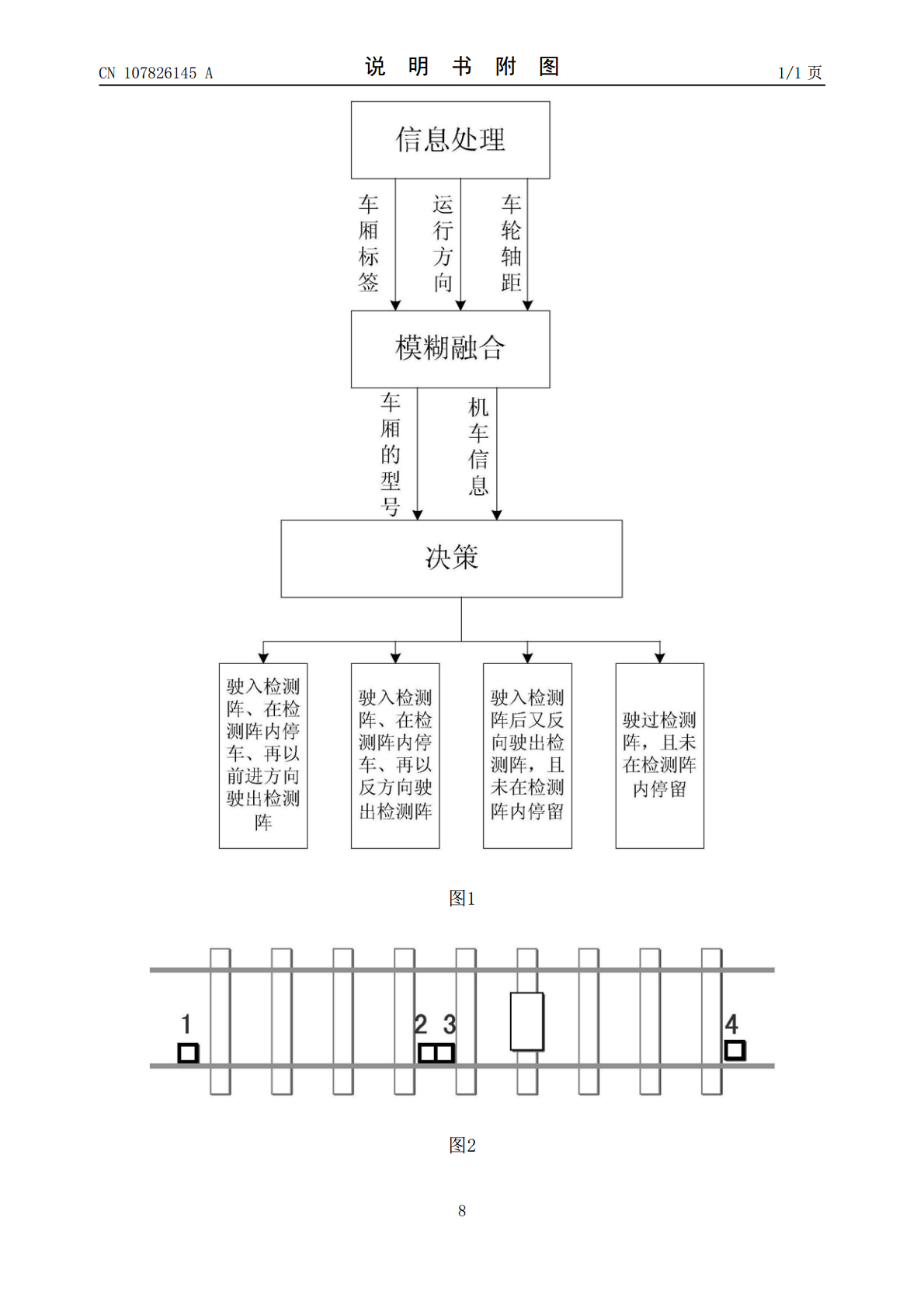
基于车轮传感器检测阵的车辆作业情况检测方法,涉及铁路车号自动识别装置中的传感器检测阵技术领域。本发明是为了解决难以识别复杂的铁路车辆作业情况的问题。本发明所述的基于车轮传感器检测阵的车辆作业情况检测方法,将4个车轮传感器构成一个检测阵,使用信息融合算法,针对不同的作业情况设计了多种判别模型,可以识别中途停车情况和准确判别车辆运行方向。本发明能够在车速低于5km/h的情况下,也可以准确识别车轮信号,完成计轴、判辆。
基于车轮的目标车辆姿态检测方法.pdf
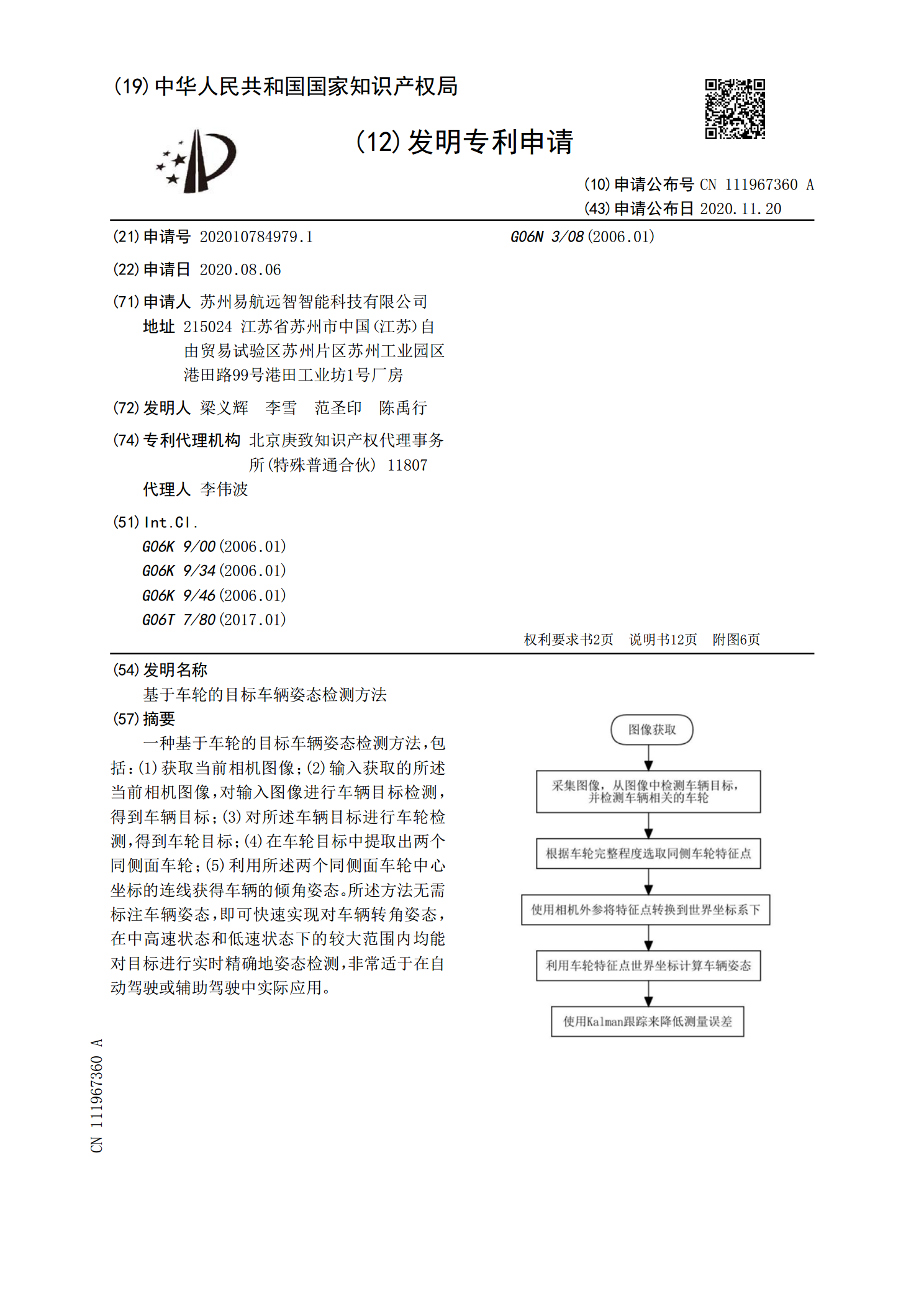
一种基于车轮的目标车辆姿态检测方法,包括:(1)获取当前相机图像;(2)输入获取的所述当前相机图像,对输入图像进行车辆目标检测,得到车辆目标;(3)对所述车辆目标进行车轮检测,得到车轮目标;(4)在车轮目标中提取出两个同侧面车轮;(5)利用所述两个同侧面车轮中心坐标的连线获得车辆的倾角姿态。所述方法无需标注车辆姿态,即可快速实现对车辆转角姿态,在中高速状态和低速状态下的较大范围内均能对目标进行实时精确地姿态检测,非常适于在自动驾驶或辅助驾驶中实际应用。

基于激光位移传感器的城轨车辆车轮直径在线检测方法.pdf
本发明公开了一种基于激光位移传感器的城轨车辆车轮直径在线检测方法。步骤如下:沿列车前进方向在轨道内侧依次设置第一、二、三激光位移传感器,第四激光位移传感器设置于轨道外侧且与第三激光位移传感器对称;将该四个激光位移传感器同时探测车轮得到的探测点坐标进行坐标变换;将坐标变换后的第三、四激光位移传感器的探测数据融合到同一坐标系上,得到完整踏面轮廓线;根据坐标变换之后的数据,对踏面右端面进行提取,确定踏面右端面的横坐标;对踏面曲线进行分段拟合后,根据踏面右端面横坐标值,分别提取第一、二、三激光位移传感器测得的踏面

基于面阵CCD/CMOS的360°检测传感器及检测方法.pdf
本发明公开了一种基于面阵CCD/CMOS的360°检测传感器及检测方法,包括面阵CCD/CMOS传感器、圆锥镜以及遮光筒、光源、准直透镜、滤光片、圆筒形视窗、圆形孔径光阑,光源经过准直透镜后,经过圆锥镜发射后,经过圆筒形视窗发出,遇到反射物后,经过反射物反射圆锥镜,再经过圆锥镜发射,通过圆形孔径光阑、滤光片反射到面阵CCD/CMOS传感器上。相应地还提供了一种基于上述的面阵CCD/CMOS的360°检测传感器的检测方法,本发明实现360度无死角检测,实现一机全覆盖检测,或区域检测,可用于周域防撞、区域安防

基于激光传感器的城轨车辆车轮不圆度检测装置及方法.pdf
本发明公开了一种基于激光传感器的城轨车辆车轮不圆度检测装置及方法。该装置包括中央处理单元和多个激光传感器,所述激光传感器均与中央处理单元连接;检测区段的钢轨向外偏移,且该检测区段的钢轨内侧设置护轨;激光传感器设置于钢轨偏移所空出的区域与护轨之间,激光传感器的探头沿钢轨方向排列且均位于车轮下方,所有激光传感器与进行不圆度测量的车轮圆周共面。该方法使用多个激光传感器,将其按照一定几何关系安装在车轮下方,传感器同时探测车轮得到探测点,通过最小二乘拟合得到的直径,而后对车轮整个圆周内的直径分段求均值后用最大值减去