
一种轨道车辆电机械制动防滑控制系统及方法.pdf

雨巷****可歆


1/9

2/9
3/9
4/9
5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种轨道车辆电机械制动防滑控制系统及方法.pdf
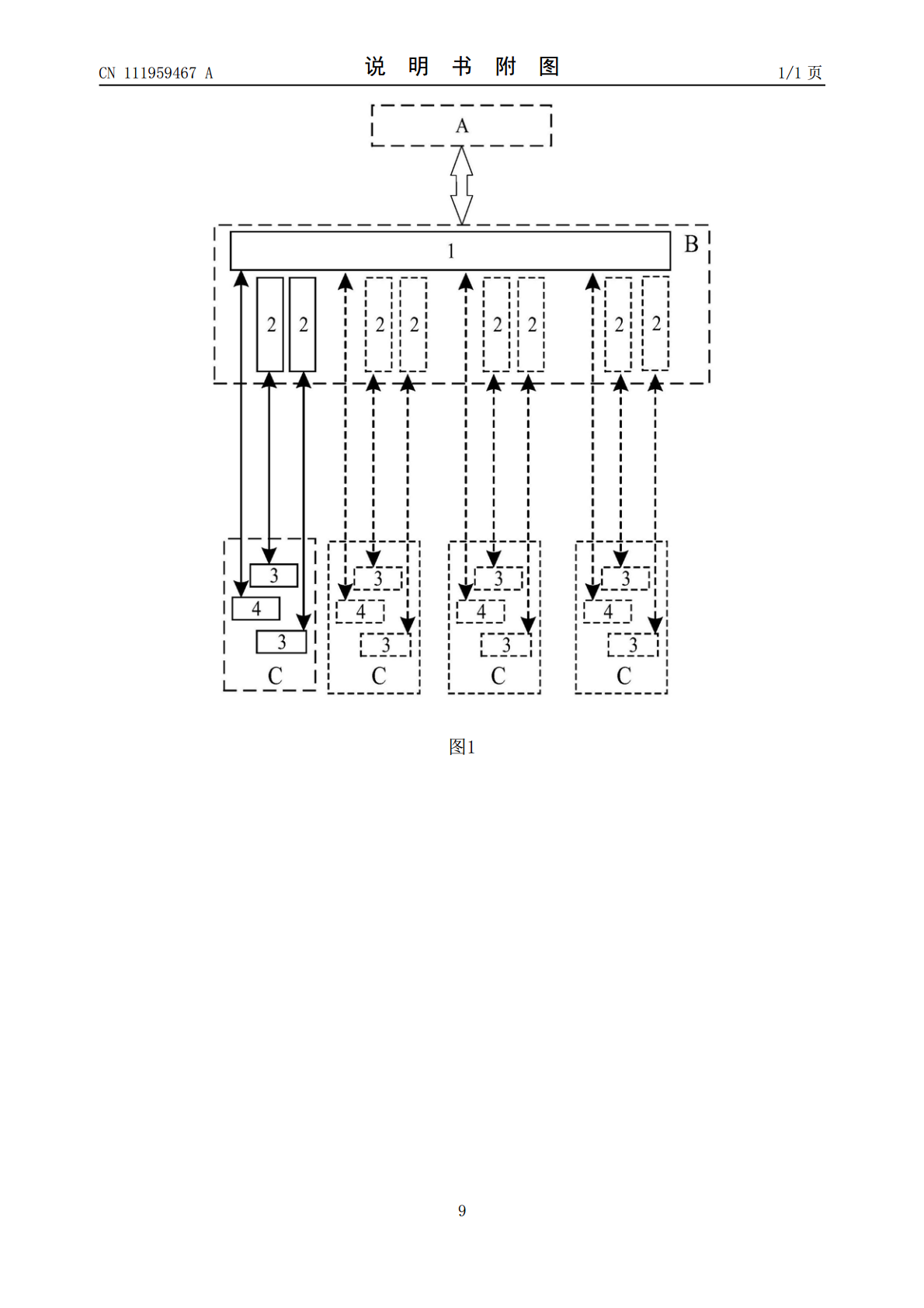
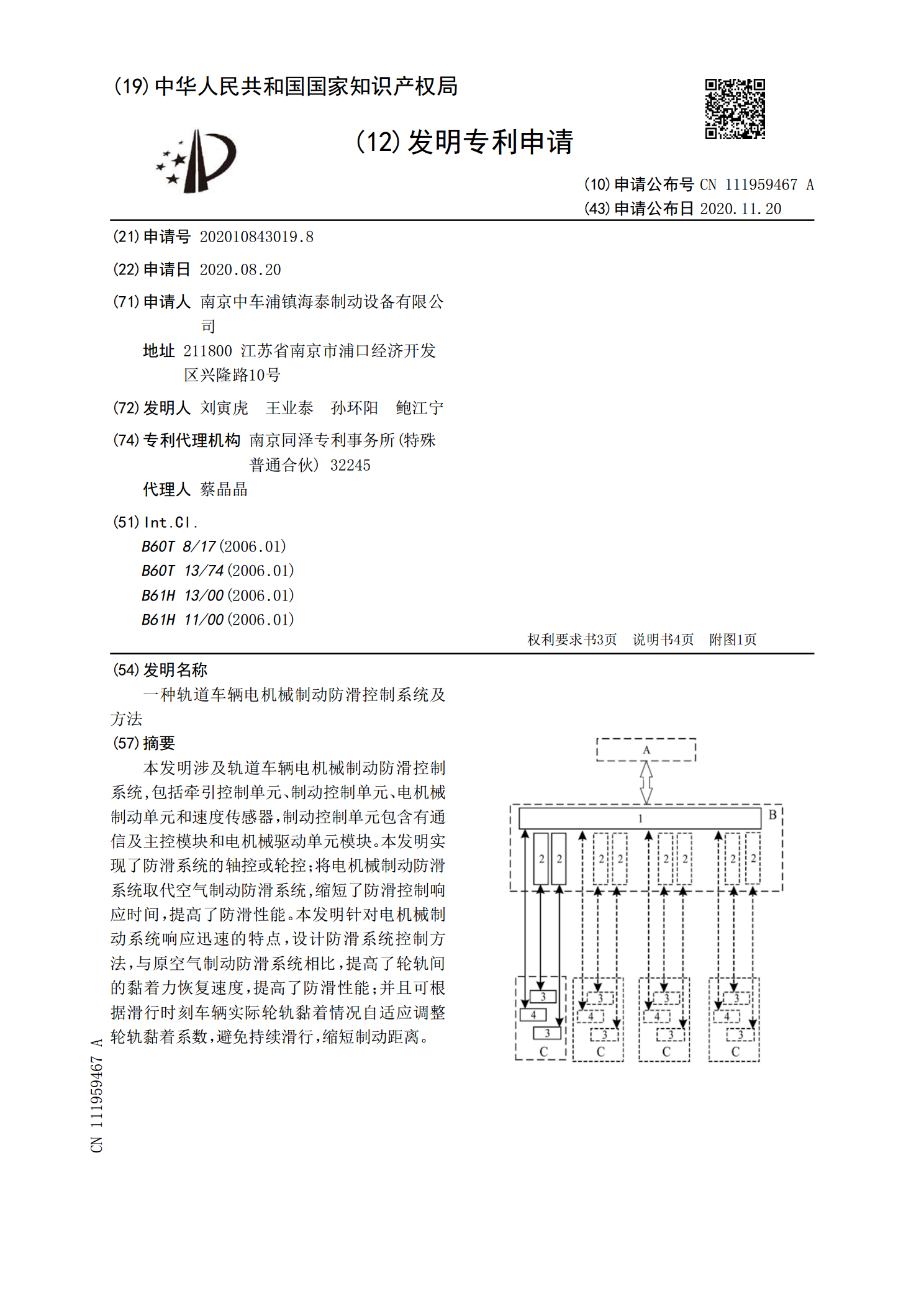
本发明涉及轨道车辆电机械制动防滑控制系统,包括牵引控制单元、制动控制单元、电机械制动单元和速度传感器,制动控制单元包含有通信及主控模块和电机械驱动单元模块。本发明实现了防滑系统的轴控或轮控;将电机械制动防滑系统取代空气制动防滑系统,缩短了防滑控制响应时间,提高了防滑性能。本发明针对电机械制动系统响应迅速的特点,设计防滑系统控制方法,与原空气制动防滑系统相比,提高了轮轨间的黏着力恢复速度,提高了防滑性能;并且可根据滑行时刻车辆实际轮轨黏着情况自适应调整轮轨黏着系数,避免持续滑行,缩短制动距离。

一种轨道车辆制动系统防滑控制方法.pdf
本发明涉及一种轨道车辆制动系统防滑控制方法,包括:步骤S1:基于负梯度迭代法的粘着在线估计得到黏着系数估计值;步骤S2:根据粘着系数估计值,基于最小二乘参数辨识法的最优滑移率辨识得到滑移率特性曲线;步骤S3:根据得到的滑移率特性曲线得到当前的滑移率特性曲线斜率,结合滑移率的微分确定当前控制策略。与现有技术相比,本发明能够在列车制动过程中有效的防止轮对发生滑行,而且提高黏着利用率,缩短制动距离。
一种轨道车辆防滑控制系统及其方法.pdf
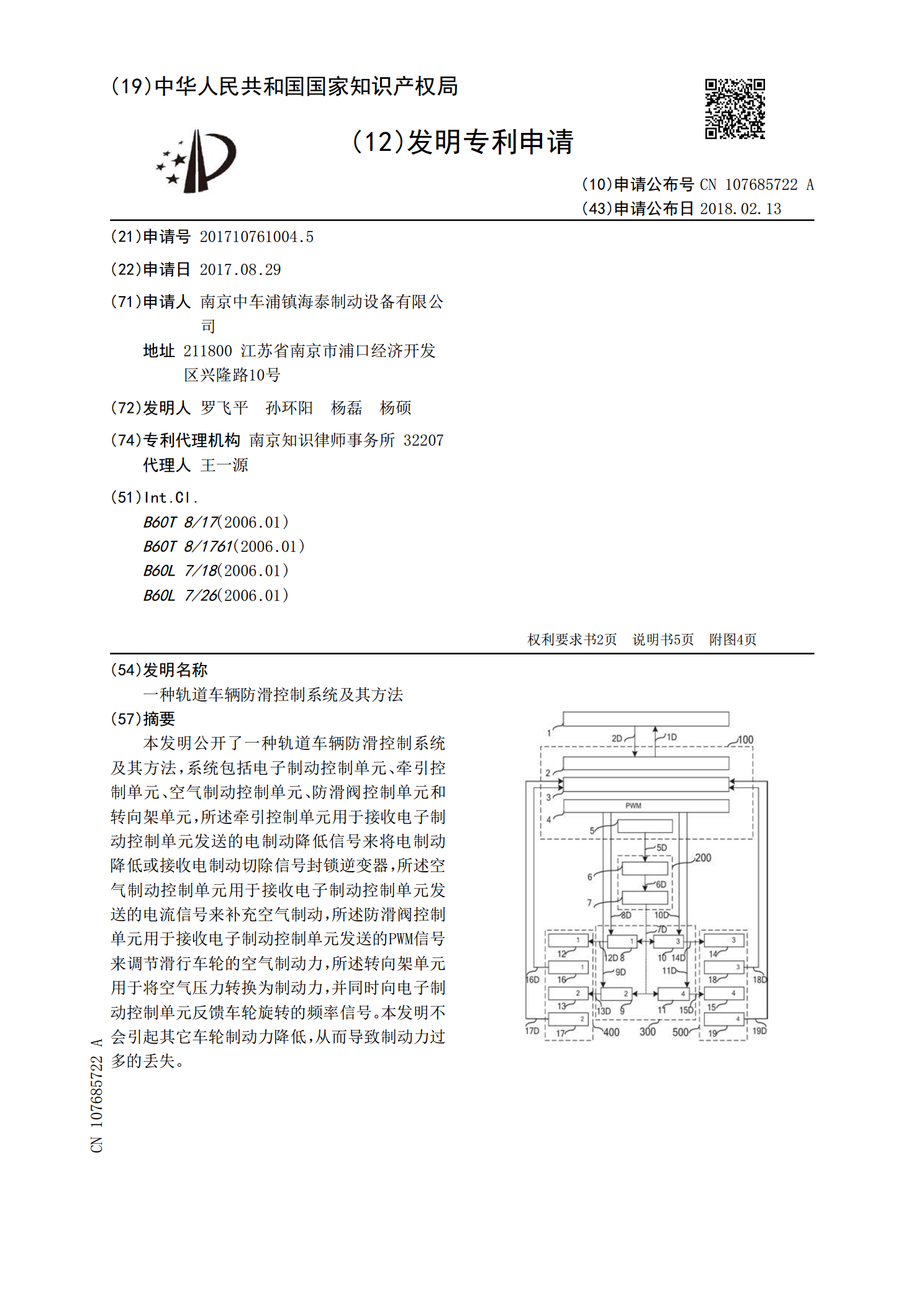
本发明公开了一种轨道车辆防滑控制系统及其方法,系统包括电子制动控制单元、牵引控制单元、空气制动控制单元、防滑阀控制单元和转向架单元,所述牵引控制单元用于接收电子制动控制单元发送的电制动降低信号来将电制动降低或接收电制动切除信号封锁逆变器,所述空气制动控制单元用于接收电子制动控制单元发送的电流信号来补充空气制动,所述防滑阀控制单元用于接收电子制动控制单元发送的PWM信号来调节滑行车轮的空气制动力,所述转向架单元用于将空气压力转换为制动力,并同时向电子制动控制单元反馈车轮旋转的频率信号。本发明不会引起其它车轮
一种机车制动控制系统及轨道车辆.pdf
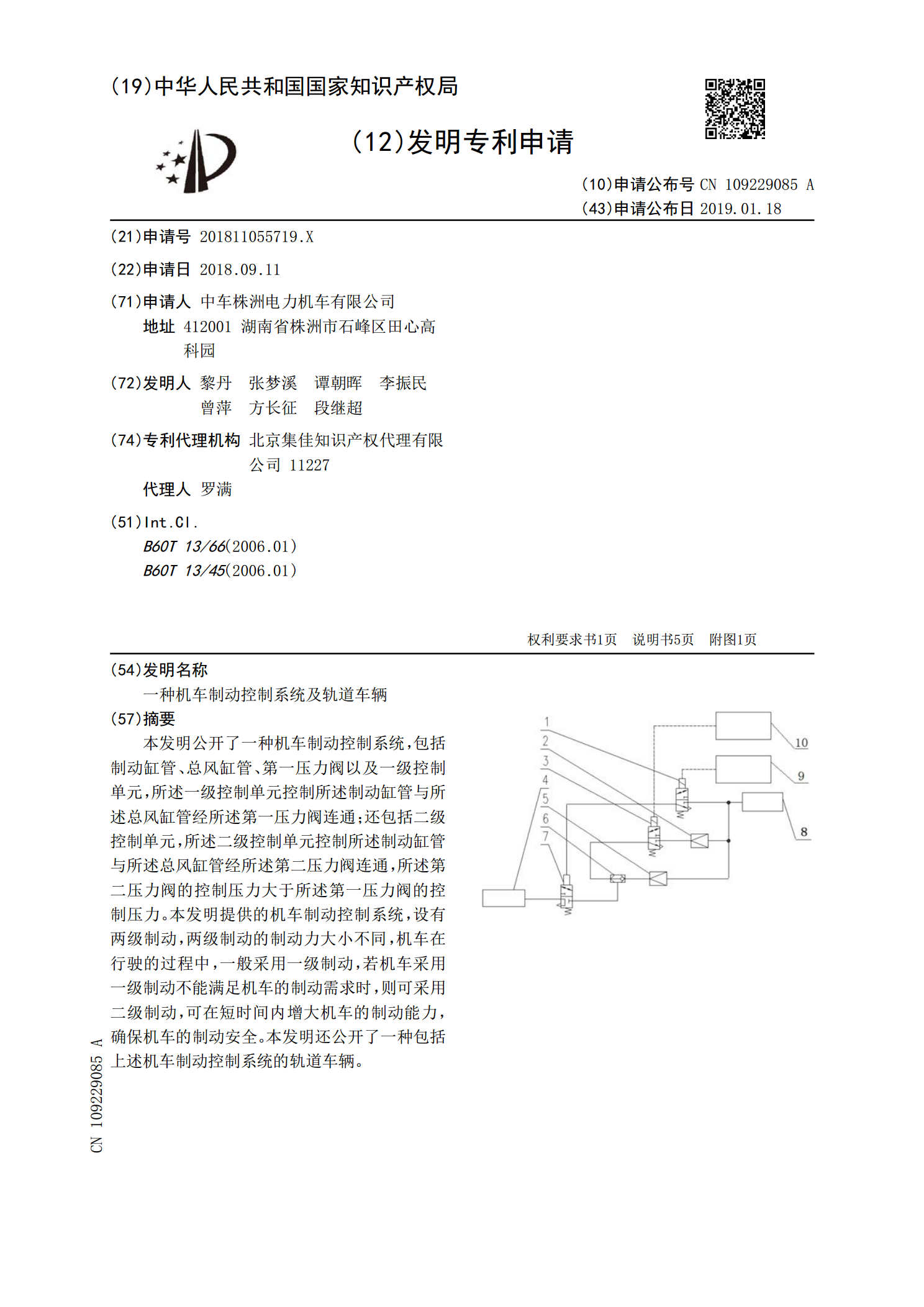
本发明公开了一种机车制动控制系统,包括制动缸管、总风缸管、第一压力阀以及一级控制单元,所述一级控制单元控制所述制动缸管与所述总风缸管经所述第一压力阀连通;还包括二级控制单元,所述二级控制单元控制所述制动缸管与所述总风缸管经所述第二压力阀连通,所述第二压力阀的控制压力大于所述第一压力阀的控制压力。本发明提供的机车制动控制系统,设有两级制动,两级制动的制动力大小不同,机车在行驶的过程中,一般采用一级制动,若机车采用一级制动不能满足机车的制动需求时,则可采用二级制动,可在短时间内增大机车的制动能力,确保机车的制

用于轨道交通车辆制动控制系统的防滑控制板.pdf
本发明提供了一种用于轨道交通车辆制动控制系统的防滑控制板,该防滑控制板包括:频率输入端口,用于接收车轴速度传感器的旋转速度信号;主控制芯片,与频率输入端口和功率输出端口相连,获取轴速信号后,通过防滑控制逻辑的运算,通过功率输出端口发出防滑阀的控制信号;功率输出端口,用于将主控制芯片产生的防滑控制信号进行匹配变换后控制防滑阀;数据总线端口,与制动控制系统中除防滑控制板外的其它功能板卡连接。本发明提供的用于轨道交通车辆制动控制系统的防滑控制板,利用主控制芯片对速度信息的采集分析后发出控制指令,控制防滑阀从而控