
拉矫破鳞机啮合量的标定方法、标定装置与电子设备.pdf

又珊****ck


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
拉矫破鳞机啮合量的标定方法、标定装置与电子设备.pdf
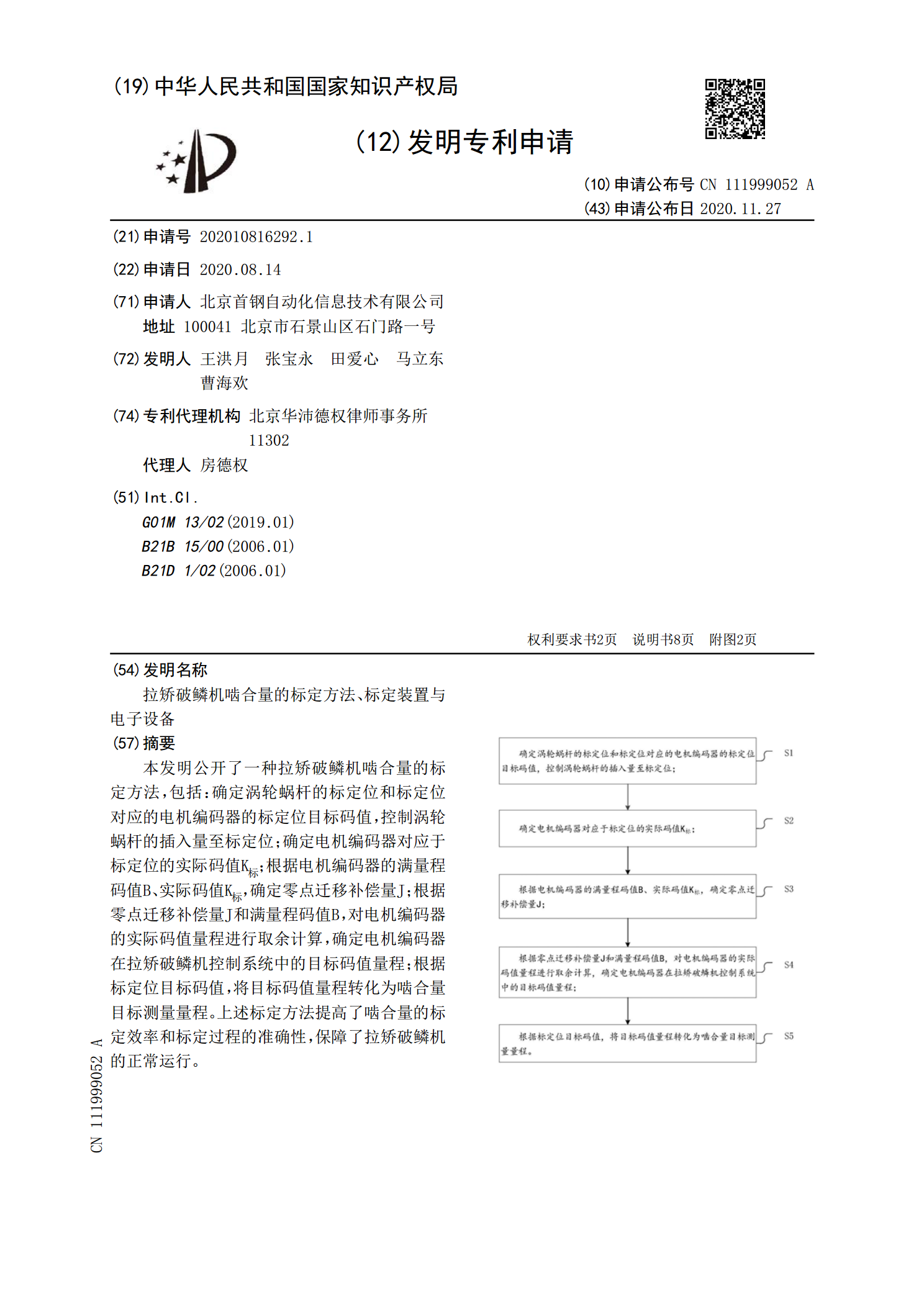
本发明公开了一种拉矫破鳞机啮合量的标定方法,包括:确定涡轮蜗杆的标定位和标定位对应的电机编码器的标定位目标码值,控制涡轮蜗杆的插入量至标定位;确定电机编码器对应于标定位的实际码值K
标定器具和标定方法、装置、电子设备和存储介质.pdf
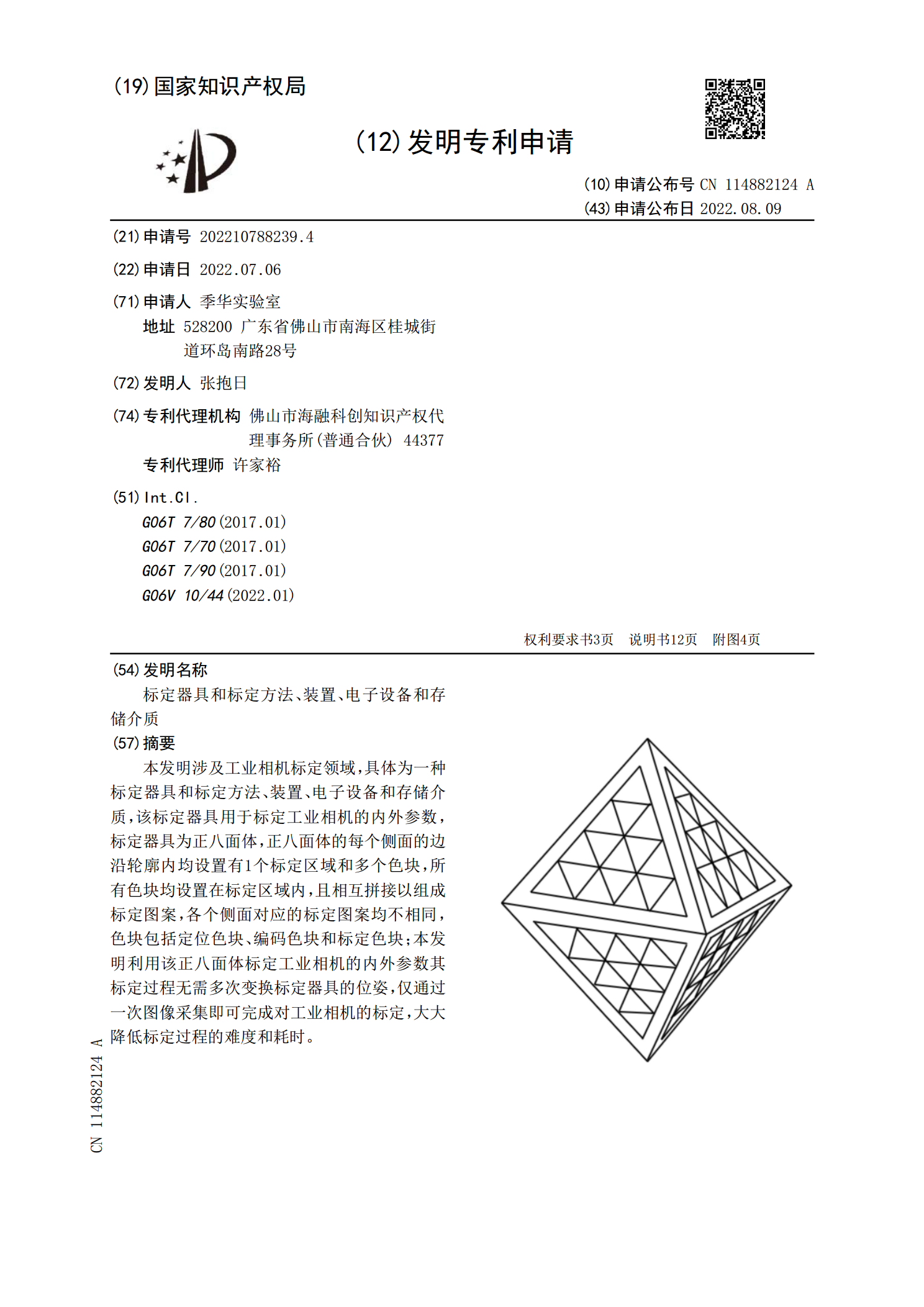
本发明涉及工业相机标定领域,具体为一种标定器具和标定方法、装置、电子设备和存储介质,该标定器具用于标定工业相机的内外参数,标定器具为正八面体,正八面体的每个侧面的边沿轮廓内均设置有1个标定区域和多个色块,所有色块均设置在标定区域内,且相互拼接以组成标定图案,各个侧面对应的标定图案均不相同,色块包括定位色块、编码色块和标定色块;本发明利用该正八面体标定工业相机的内外参数其标定过程无需多次变换标定器具的位姿,仅通过一次图像采集即可完成对工业相机的标定,大大降低标定过程的难度和耗时。

一种拉矫破鳞机自适应工作辊盒.pdf
本发明公开了一种拉矫破鳞机自适应工作辊盒,属于金属轧制技术领域,包括辊盒本体,所述辊盒本体上设置有工作辊、用于支撑工作辊的支撑辊组件、用于防止工作辊轴向窜辊的防窜装置以及用于辊盒本体滑动的滚轮组件,所述辊盒本体包括底座Ⅰ和通过连接件定位连接在底座Ⅰ上的底座Ⅱ,所述底座Ⅰ和底座Ⅱ之间设置有弹性变形机构。本发明的自适应工作辊盒在工作时通过弹性变形机构的自适应弹性变形,使得工作辊具有自动适应来料板型、自动调整与热轧带钢表面的受力的能力,使工作辊表面尽可能均匀磨损,从而提高工作辊寿命,降低换辊频率,进而降低机组的

摄像机外参标定方法、装置和电子设备.pdf
本申请涉及摄像机外参标定方法、装置和电子设备。根据一实施例,一种摄像机外参标定方法可包括:接收由摄像机拍摄的图像;渲染所述图像以在所述图像上标记多个图像点;确定与所述多个图像点中的至少四个图像点对应的物理空间中的至少四个物理点在世界坐标系中的坐标;以及基于所述至少四个图像点在图像坐标系中的坐标和所述至少四个物理点在世界坐标系中的坐标来计算所述摄像机的外参。本申请的摄像机外参标定方法能够实现摄像机外参的简单、快速、准确标定。
球机标定方法及电子设备.pdf
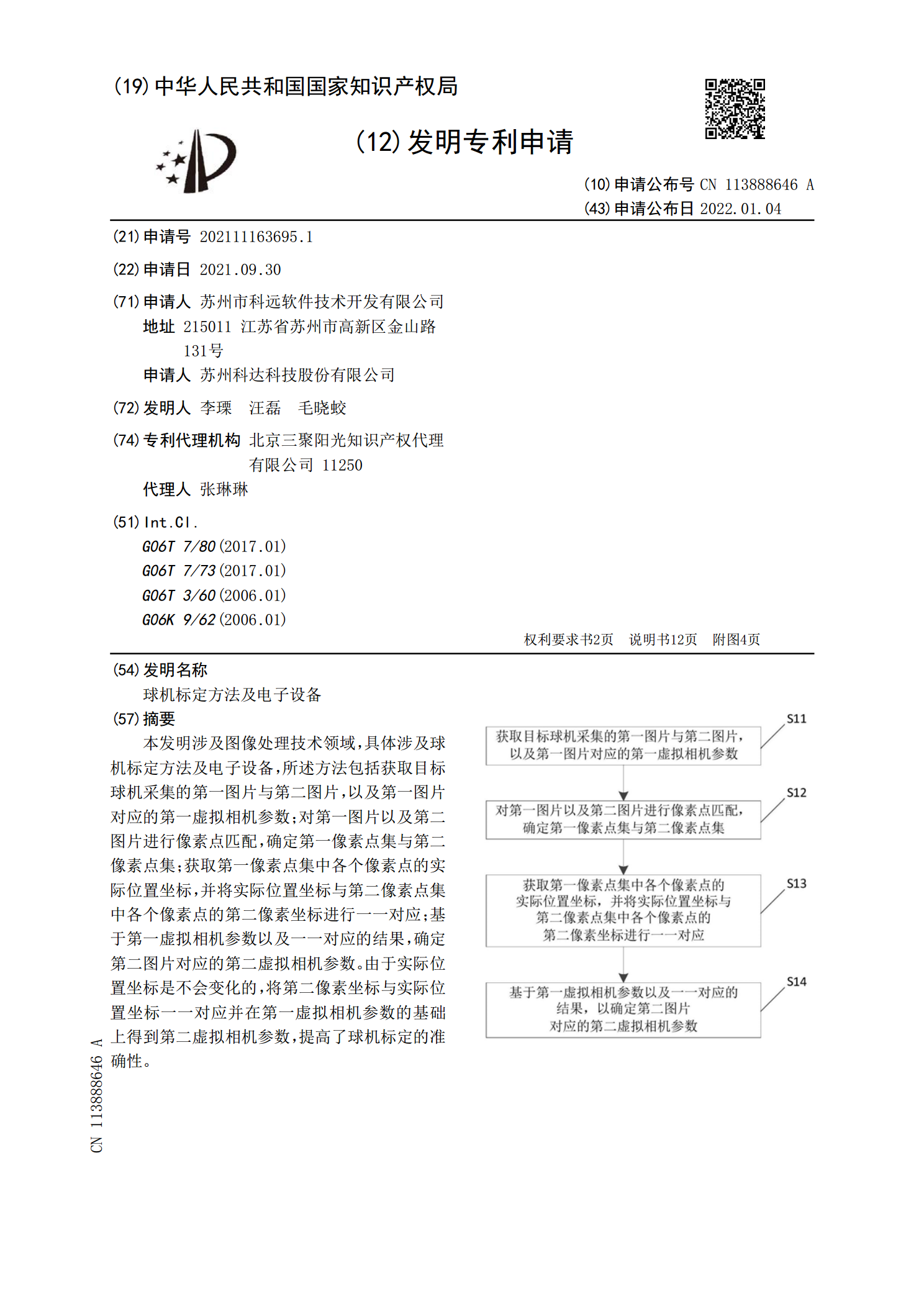
本发明涉及图像处理技术领域,具体涉及球机标定方法及电子设备,所述方法包括获取目标球机采集的第一图片与第二图片,以及第一图片对应的第一虚拟相机参数;对第一图片以及第二图片进行像素点匹配,确定第一像素点集与第二像素点集;获取第一像素点集中各个像素点的实际位置坐标,并将实际位置坐标与第二像素点集中各个像素点的第二像素坐标进行一一对应;基于第一虚拟相机参数以及一一对应的结果,确定第二图片对应的第二虚拟相机参数。由于实际位置坐标是不会变化的,将第二像素坐标与实际位置坐标一一对应并在第一虚拟相机参数的基础上得到第二虚