
一种电力线路作业行走机器人.pdf

猫巷****忠娟


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种电力线路作业行走机器人.pdf
本发明公开一种电力线路作业行走机器人,在箱体的顶部设有电力工具箱,箱体的两侧对称设有机械臂,机械臂包括悬臂和电动伸缩杆,箱体的内部两侧的第一电机与悬臂的一端连接,悬臂的另一端设有第二电机,第二电机与电动伸缩杆的底部连接,电动伸缩杆的顶部设有行走机构,行走机构包括固定在电动伸缩杆上的连接架,第三电机与连接架的底部连接,连接架的内部一侧通过转轴套接有滚轮,第四电机驱动转轴转动,连接架的顶部连接有保护架,保护架的底部铰接有转动板,第五电机通过拉绳与转动板连接。该行走机器人可便捷地实现电线间的跨越,同时具备携带电

输电线路行走机器人的行走臂.pdf
本发明公开了一种输电线路行走机器人的行走臂,包括升降组件和行走组件;升降组件包括固定套筒、下端伸入固定套筒并与固定套筒滑动配合的升降臂和与升降臂传动配合的升降电机;行走组件包括固定设置于升降臂顶端的轮架、转动配合设置于轮架上的行走轮和与行走轮传动配合的行走轮驱动电机,通过升起行走臂的行走组件让行走轮脱离导线,使行走臂满足机器人具备越障功能的要求,同时,该行走臂结构简单紧凑,重量轻,另外,通过顶轮设计,使行走臂在导线上悬挂的可靠性大大增加,有效增强了机器人在导线上行走的安全性。

一种园林作业用行走机器人.pdf
本发明公开了一种园林作业用行走机器人,包括机架,所述机架上沿同一水平面的从前往后方向上依次设有第一转动轴、第二转动轴、第三转动轴、第四转动轴,所述第一转动轴、第二转动轴的一侧连接有第一行走机构,另一侧连接有第二行走机构,所述第三转动轴、第四转动轴的一侧连接有第三行走机构,另一侧连接有第四行走机构,所述第一行走机构包括垂直连接于第一转动轴一端的第一曲柄、垂直连接于第二转动轴一端的第二曲柄,所述第一曲柄、第二曲柄等长且平行,所述第一曲柄和第二曲柄的另一端通过第一连杆相连。本发明的机器人通过单电机的输出就可以实

一种新型输电线路行走机器人及越障方法.pdf
本发明公开了一种新型输电线路行走机器人及越障方法,涉及巡线机器人领域,该新型输电线路行走机器人包括4个行走轮、两根连杆和一个下箱体,能在输电线路上以预想的速度前进、具有一定的爬坡能力、能够跨越输电线路上的防震锤、线夹、绝缘子等障碍物的多种功能,可作为一种巡线机器人,在行走过程中,将线路各种数据通过传感器传送至计算机,供工作人员分析研究,以确定线路工作状态,据此采取措施保证线路正常运行,安装上相应除冰装置后,还可实现清除输电线路上覆冰的功能。
一种平衡行走模块化作业机器人.pdf
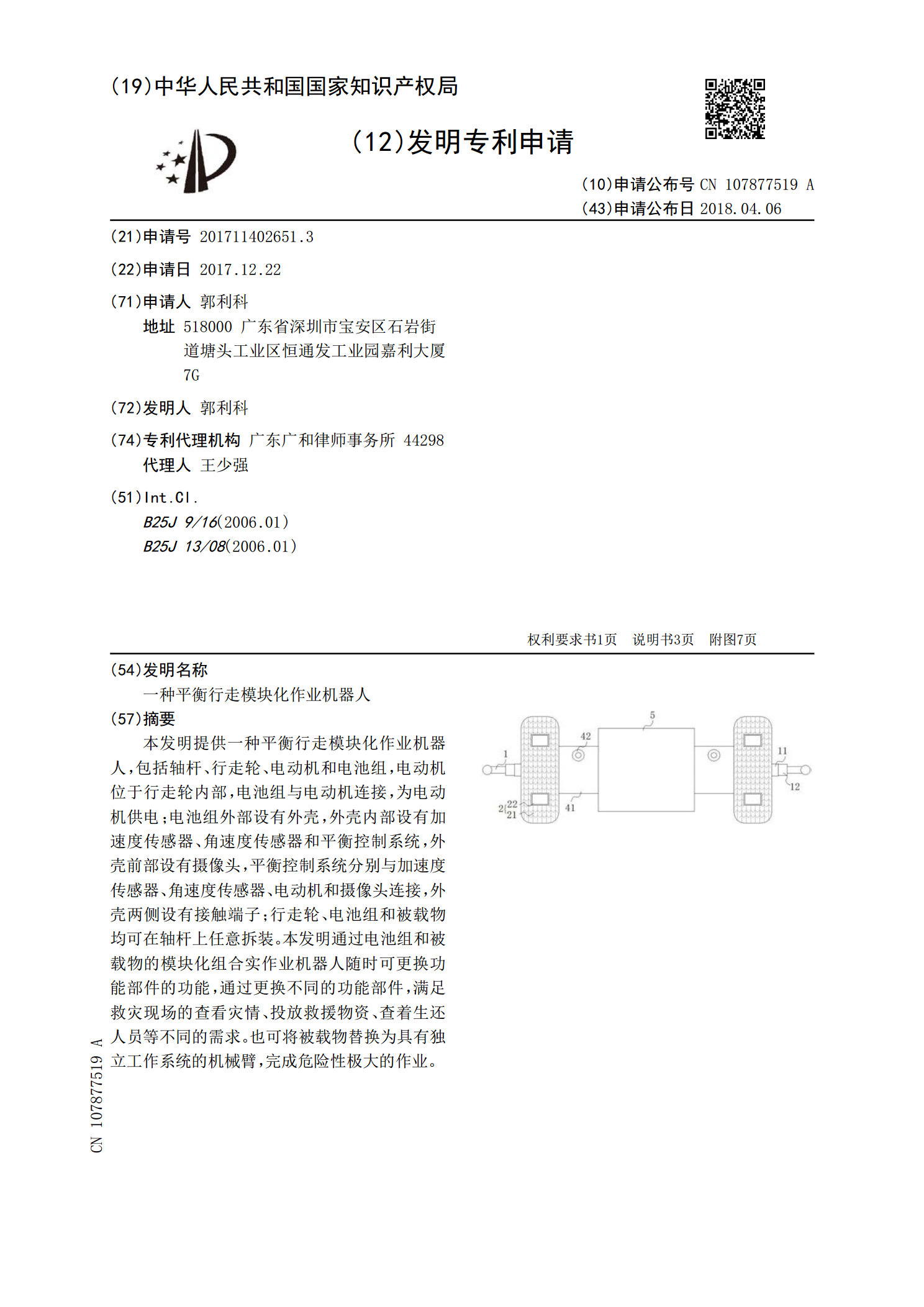
本发明提供一种平衡行走模块化作业机器人,包括轴杆、行走轮、电动机和电池组,电动机位于行走轮内部,电池组与电动机连接,为电动机供电;电池组外部设有外壳,外壳内部设有加速度传感器、角速度传感器和平衡控制系统,外壳前部设有摄像头,平衡控制系统分别与加速度传感器、角速度传感器、电动机和摄像头连接,外壳两侧设有接触端子;行走轮、电池组和被载物均可在轴杆上任意拆装。本发明通过电池组和被载物的模块化组合实作业机器人随时可更换功能部件的功能,通过更换不同的功能部件,满足救灾现场的查看灾情、投放救援物资、查着生还人员等不同