
一种智能防疫门卫机器人.pdf

猫巷****奕声

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

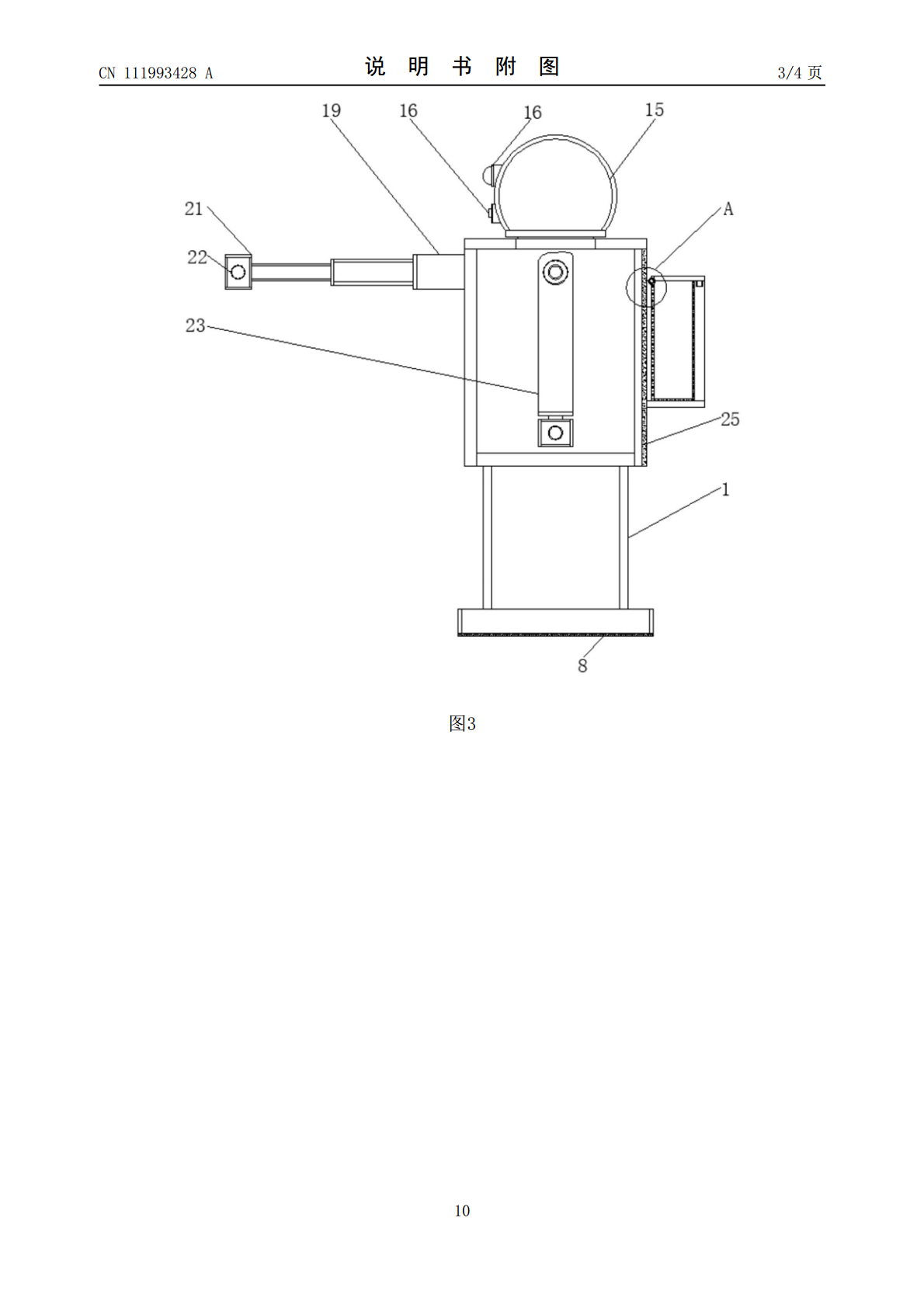
一种智能防疫门卫机器人.pdf
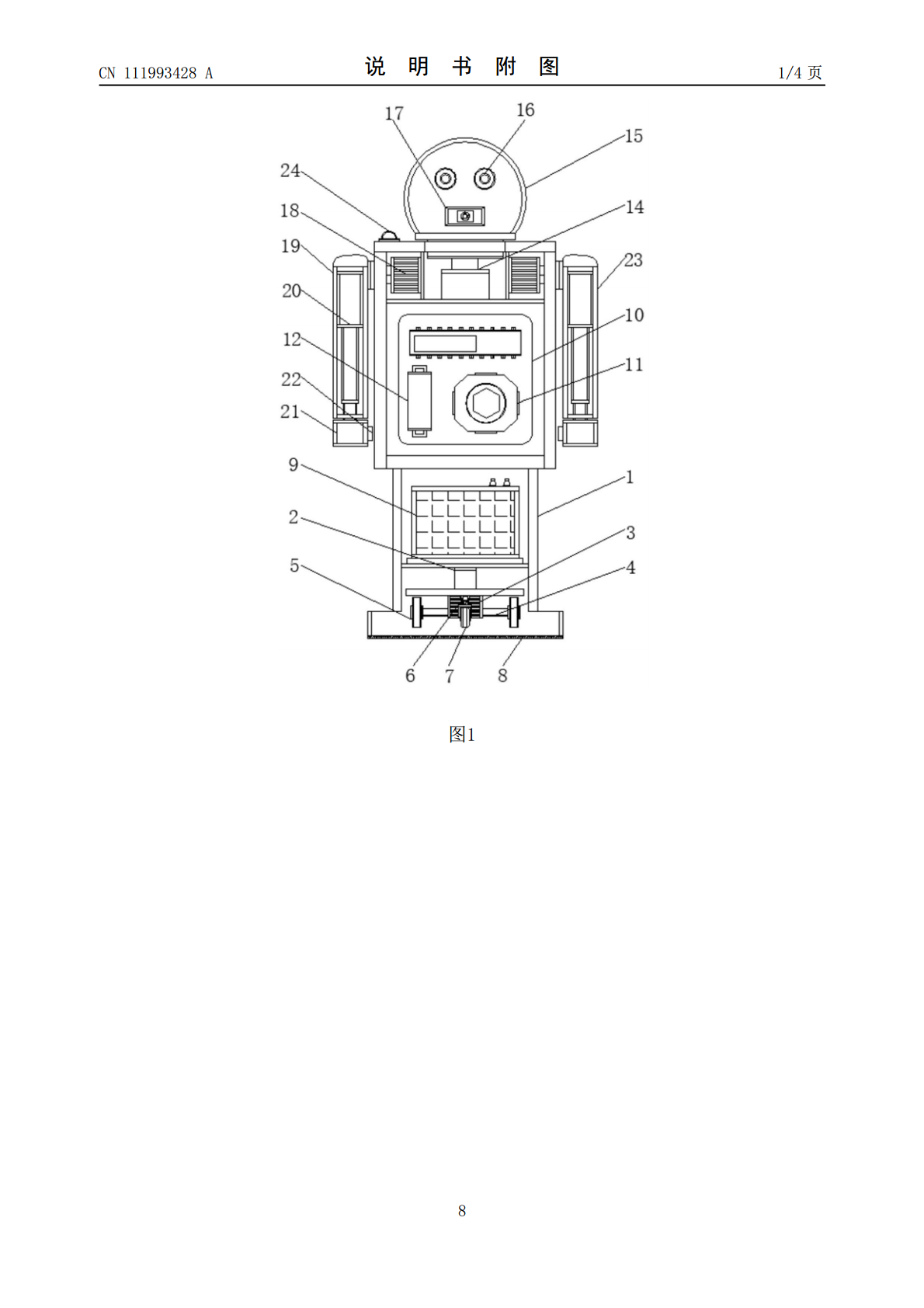
本发明公开了一种智能防疫门卫机器人,包括机器人体和伺服电机二,所述机器人体的内部下端设置有电动推杆,且电动推杆的下端设置有步进电机,所述步进电机的输出端设置有连接杆,且步进电机的前侧设置有转向电机,所述转向电机的输出端设置有万向轮,所述伺服电机二设置于伺服电机一的左侧,且伺服电机二的输出端设置有阻挡臂一,所述阻挡臂一的内侧设置有延长推杆,且延长推杆的下端设置有固定块,所述固定块的内侧设置有红外测温仪。通过设置的伺服电机二能够对阻挡臂一的倾斜角度进行调节,避免使用时阻挡臂一角度调节不便而影响装置的后续使用,
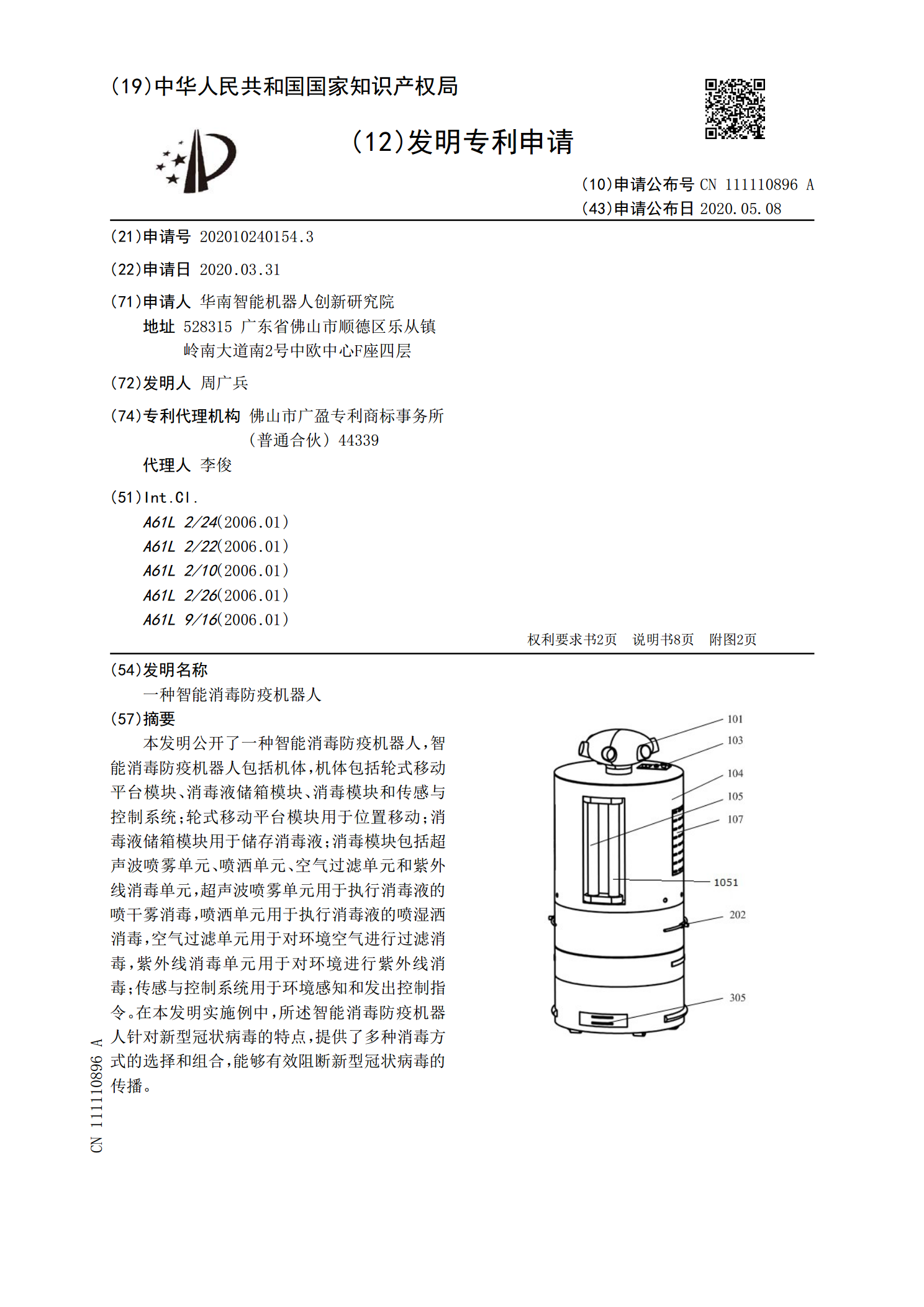
一种智能消毒防疫机器人.pdf
本发明公开了一种智能消毒防疫机器人,智能消毒防疫机器人包括机体,机体包括轮式移动平台模块、消毒液储箱模块、消毒模块和传感与控制系统;轮式移动平台模块用于位置移动;消毒液储箱模块用于储存消毒液;消毒模块包括超声波喷雾单元、喷洒单元、空气过滤单元和紫外线消毒单元,超声波喷雾单元用于执行消毒液的喷干雾消毒,喷洒单元用于执行消毒液的喷湿洒消毒,空气过滤单元用于对环境空气进行过滤消毒,紫外线消毒单元用于对环境进行紫外线消毒;传感与控制系统用于环境感知和发出控制指令。在本发明实施例中,所述智能消毒防疫机器人针对新型冠

一种智能安检防疫机器人控制系统设计.docx
一种智能安检防疫机器人控制系统设计张雨新陈文哲成咏华曾艳王震生摘要:为了助力新冠疫情防控,降低火车站、客车站等公共场合交叉感染的概率,降低防疫人员工作强度,开发了一款防疫消杀机器人。该机器人系统以树莓派为核心控制器,增加了人脸识别模块、智能测温模块、智能消杀模块,通过系统硬件设计使该机器人系统在功能上集识别、测温、消杀于一体。同时,设计该系统的外观结构,并进行材料选择与测试。通过多次仿真实验,该机器人基本可以实现消杀作用,且效果良好。关键词:防疫机器人;智能消杀;树莓派;系统仿真:TP242;TP391.

一种防疫机器人的智能运动引导方法及系统.pdf
本发明提供了一种防疫机器人的智能运动引导方法及系统,涉及机器人运动规划技术领域,该方法包括:数据采集步骤:采集待消毒区域的地图数据,根据采集的地图数据将待消毒区域整体划分为若干子区域;人员统计步骤:分别统计各子区域的人员个数;机器消毒步骤:基于各子区域的人员个数来选择出需要进行消毒液喷洒的子区域。本发明能够根据人员流量和人员滞留时间来选择性对候车区域的不同部分进行选择性的消毒工作,弥补人员密集区域人力定时消毒在实时性方面的不足。
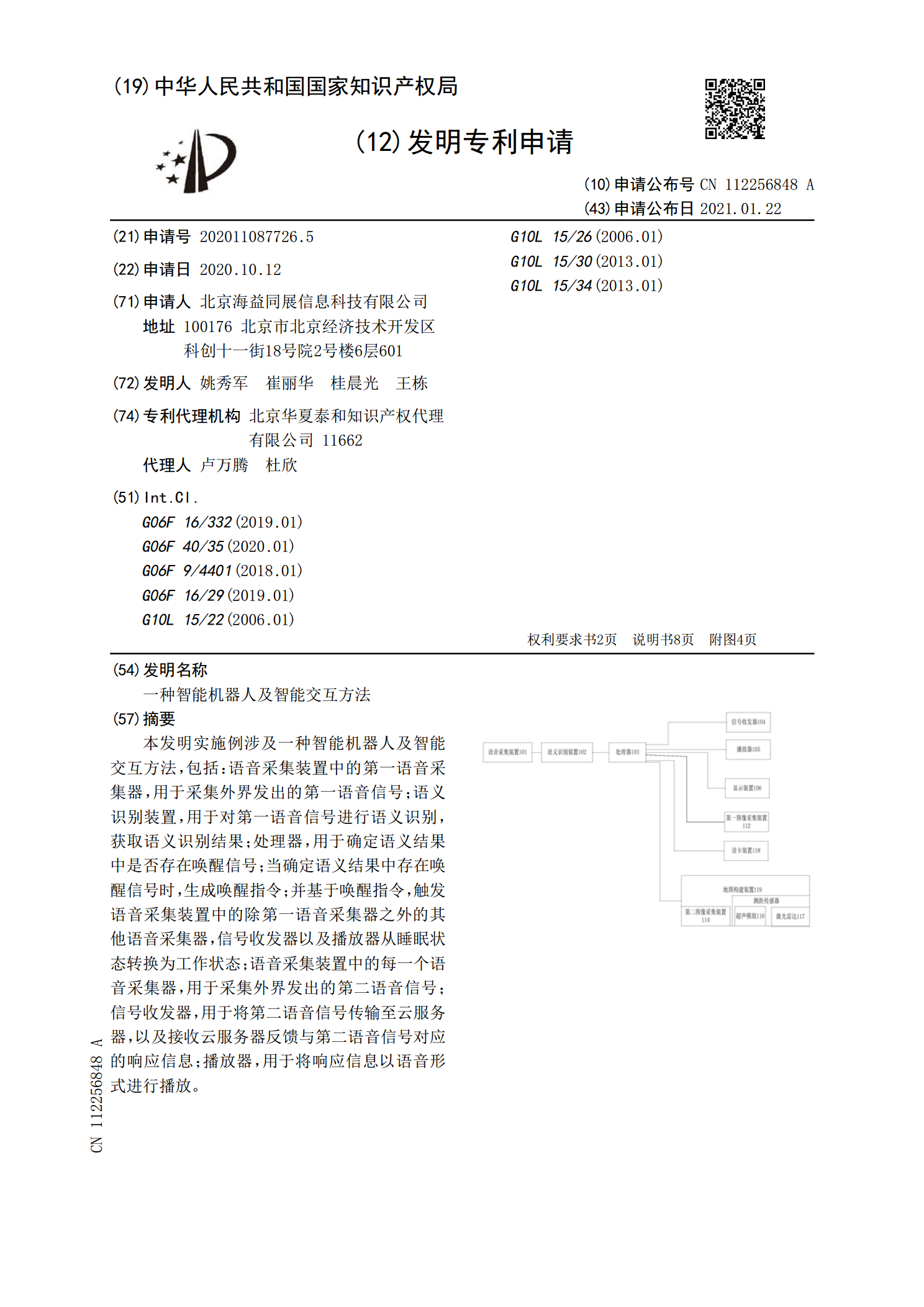
一种智能机器人及智能交互方法.pdf
本发明实施例涉及一种智能机器人及智能交互方法,包括:语音采集装置中的第一语音采集器,用于采集外界发出的第一语音信号;语义识别装置,用于对第一语音信号进行语义识别,获取语义识别结果;处理器,用于确定语义结果中是否存在唤醒信号;当确定语义结果中存在唤醒信号时,生成唤醒指令;并基于唤醒指令,触发语音采集装置中的除第一语音采集器之外的其他语音采集器,信号收发器以及播放器从睡眠状态转换为工作状态;语音采集装置中的每一个语音采集器,用于采集外界发出的第二语音信号;信号收发器,用于将第二语音信号传输至云服务器,以及接收