
手轮致动器组件.pdf

猫巷****晓容


1/10

2/10

3/10
4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
手轮致动器组件.pdf
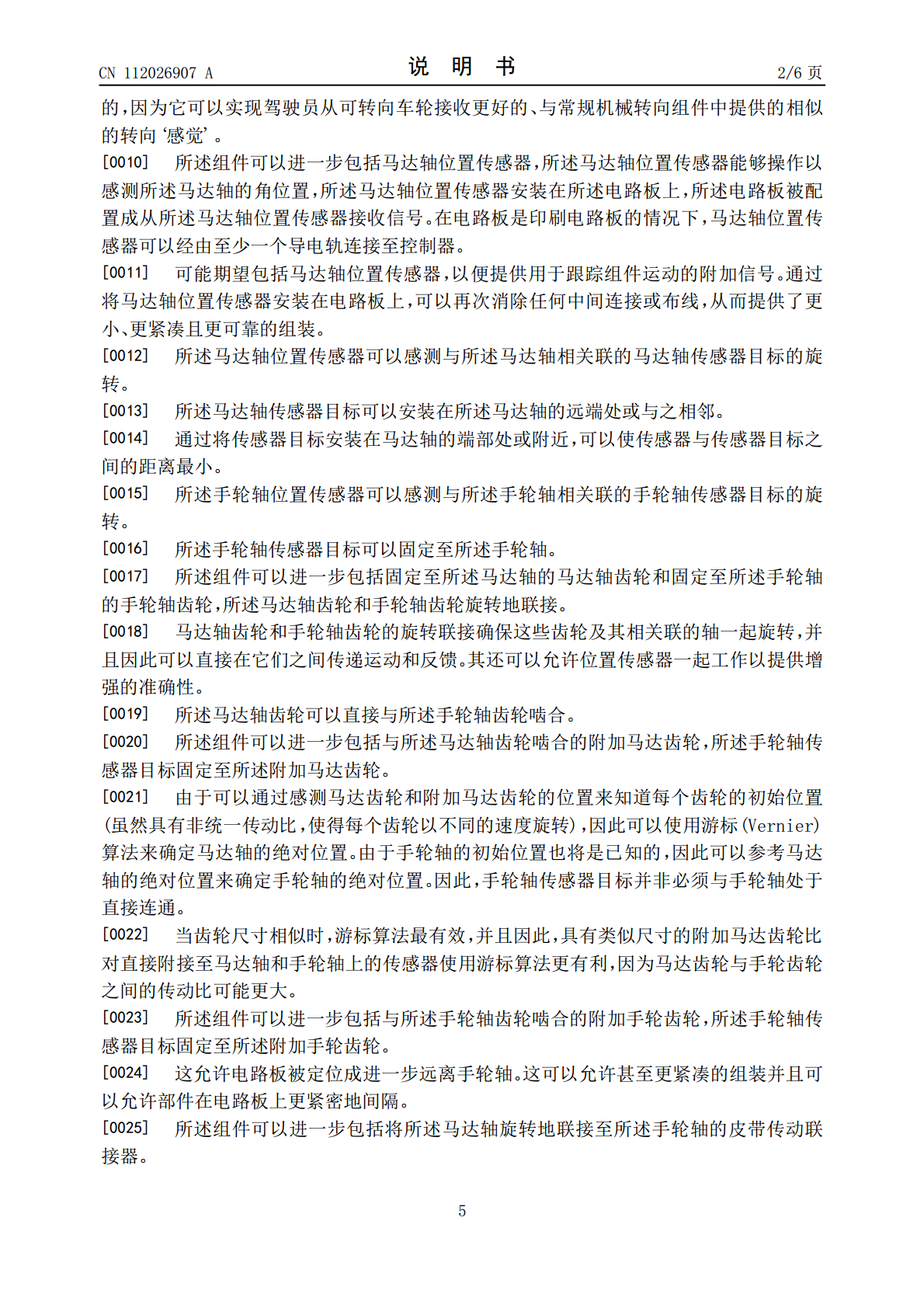
一种用于线控转向转向系统的手轮致动器组件,该手轮致动器组件包括:手轮轴,该手轮轴被配置成接纳手轮;反馈设备,该反馈设备能够操作以对手轮轴的旋转提供可变水平的阻力;以及手轮轴位置传感器,该手轮轴位置传感器能够操作以感测手轮轴的角位置;其中,该手轮轴位置传感器安装在电路板上,电路包括被配置成从手轮轴位置传感器接收信号的控制器。
手轮致动器组件.pdf
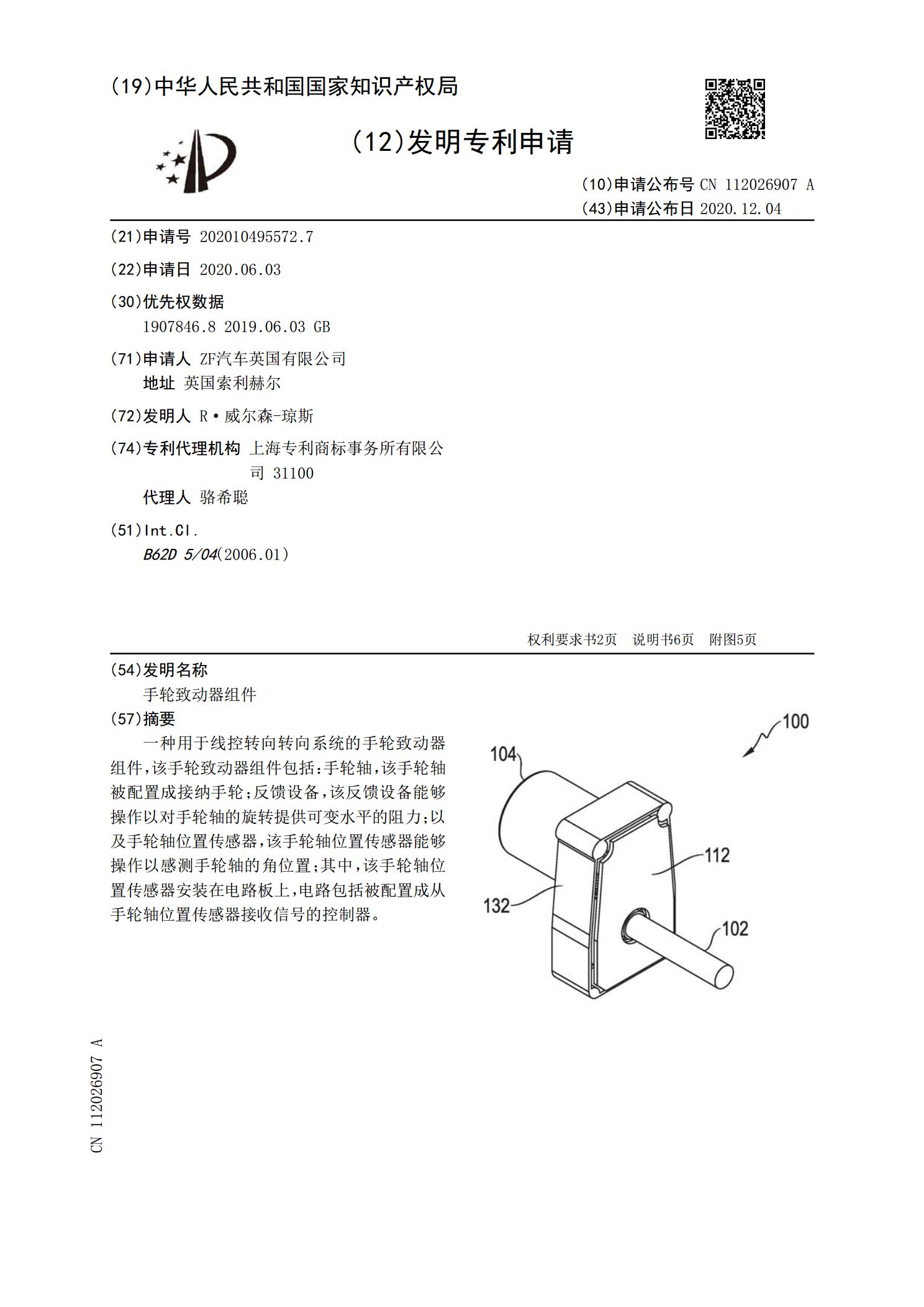
公开了一种用于车辆的线控转向式转向系统的手轮致动器组件(600)。该组件(600)包括方向盘601和反馈转矩发生器。方向盘(601)具有:可绕方向盘(601)的旋转轴线旋转的、能够由驾驶员抓握的至少一个手握部分;以及支撑手握部分的转毂(602)。该反馈转矩发生器包括电动马达,该电动马达具有定子609和转子(610)。转子(610)直接或间接地固定到方向盘(601)的转毂上并随着该转毂一起旋转,并且定子(609)紧固到车身的固定部分,使得该定子不能相对于车身旋转。该马达包括无刷永磁游标马达。

致动器组件.pdf
致动器组件、尤其用于切换机动车变速器的变速器挡位,设置有:一能在周向上围绕旋转轴线转动的且能在轴向上移动的换挡轴,其中,换挡轴具有一在径向上突起的换挡指,用于切换机动车变速器的变速器挡位;和一与该换挡指间隔开的滑动轴承,用于换挡轴的能转动且能移动的支承,其中,换挡轴与滑动轴承一起构成滑槽导向装置,用于在换挡指相对于滑动轴承的明确限定的轴向相对位置处允许换挡轴的转动。通过将所述滑动轴承作为用于所述换挡轴的滑槽导向装置的部分来使用,单独设置的滑槽可被省去,从而尤其在机动车变速器之内实现具有小的安装空间需求的致

致动器组件.pdf
本发明涉及一种致动器组件。致动器组件具有致动器、蜗轮、第一齿轮单元、第二齿轮单元和偏置构件。致动器可以使蜗轮、第一齿轮单元和第二齿轮单元以第一旋转方向旋转,而偏置构件可以使蜗轮、第一齿轮单元和第二齿轮单元以第二旋转方向旋转。

车轮致动器组件.pdf
用于车轮致动器组件的滑轮组件包括从动滑轮组件、驱动滑轮和皮带。从动滑轮组件包括从动滑轮和保持器。从动滑轮至少部分地围绕滚珠螺母设置,该滚珠螺母可操作地连接至齿杆。保持器被容纳在从动滑轮内。皮带被布置成将从动滑轮组件连接至驱动滑轮。