
相机标定方法、电子设备及存储介质.pdf

雅云****彩妍

1/10
2/10
3/10
4/10
5/10
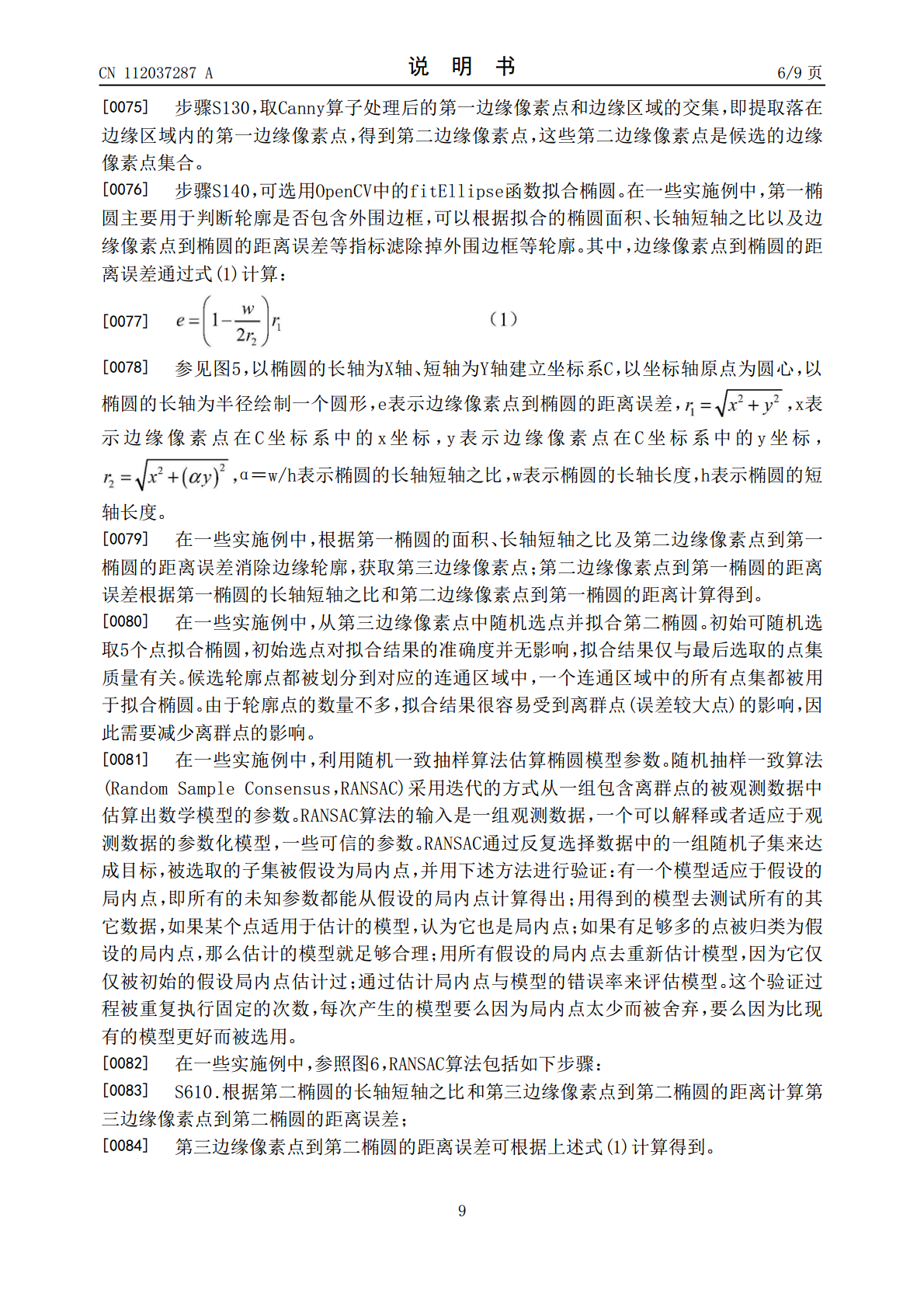
6/10
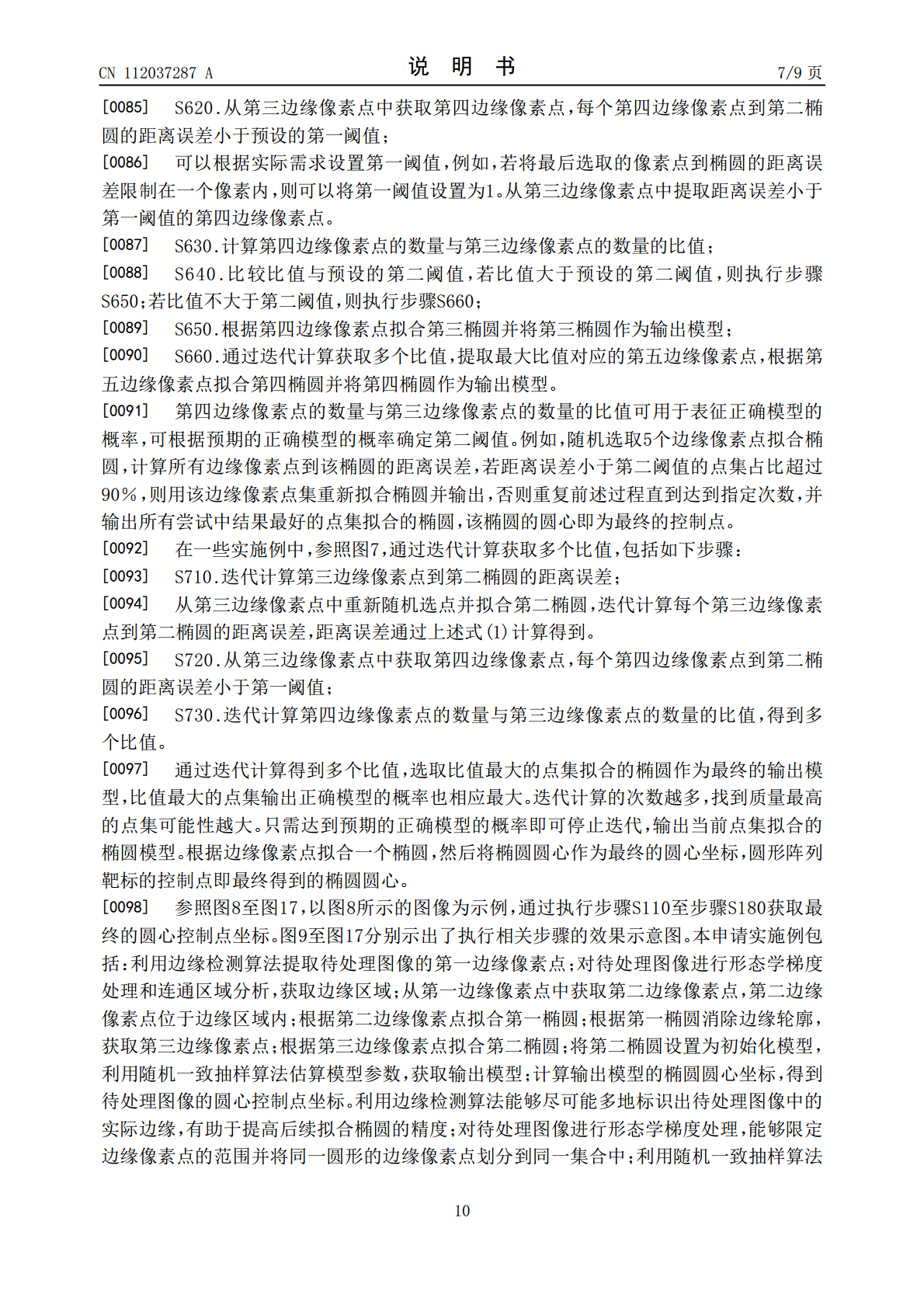
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
相机标定方法、电子设备及存储介质.pdf
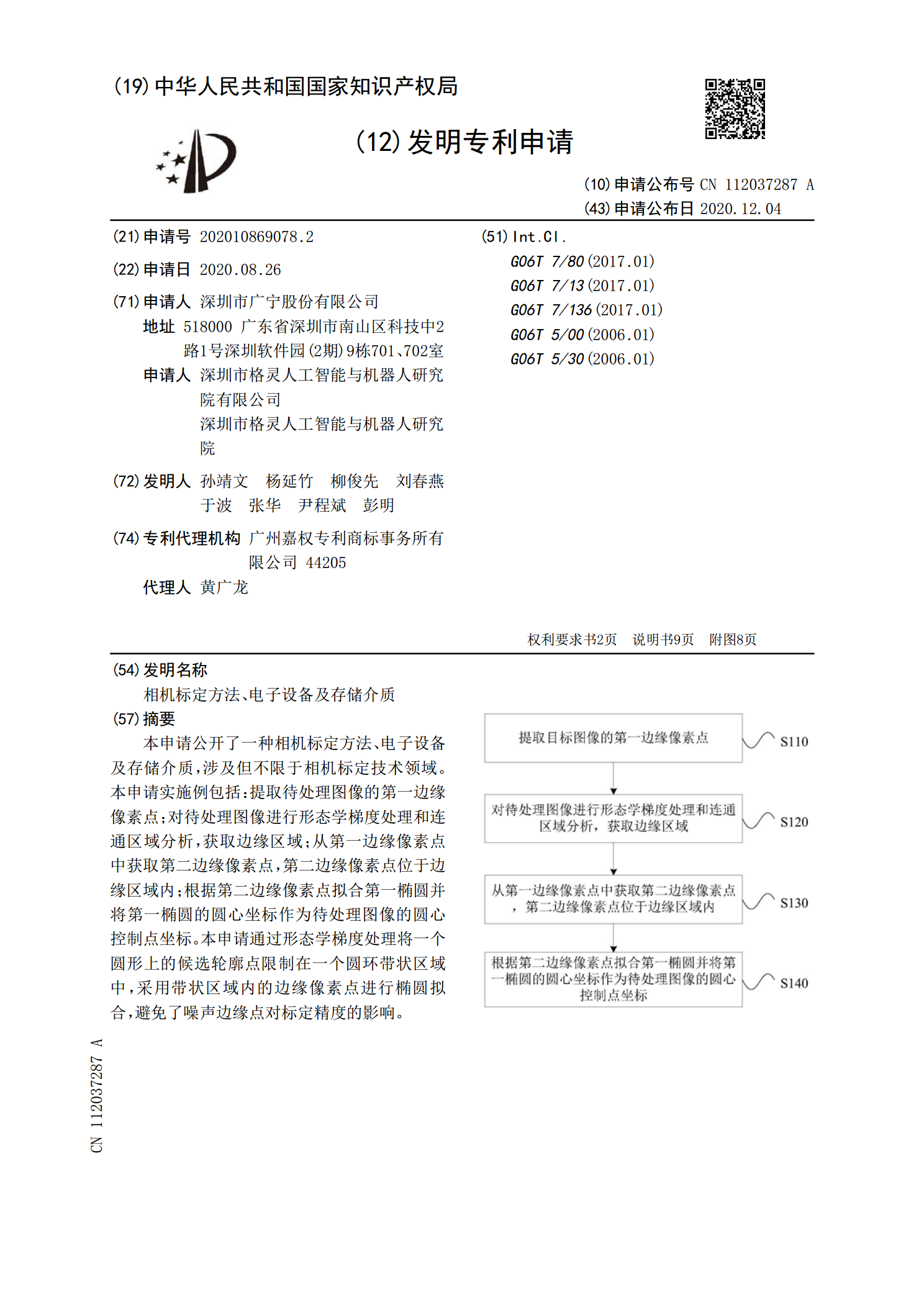
本申请公开了一种相机标定方法、电子设备及存储介质,涉及但不限于相机标定技术领域。本申请实施例包括:提取待处理图像的第一边缘像素点;对待处理图像进行形态学梯度处理和连通区域分析,获取边缘区域;从第一边缘像素点中获取第二边缘像素点,第二边缘像素点位于边缘区域内;根据第二边缘像素点拟合第一椭圆并将第一椭圆的圆心坐标作为待处理图像的圆心控制点坐标。本申请通过形态学梯度处理将一个圆形上的候选轮廓点限制在一个圆环带状区域中,采用带状区域内的边缘像素点进行椭圆拟合,避免了噪声边缘点对标定精度的影响。
相机标定方法、装置、电子设备及存储介质.pdf
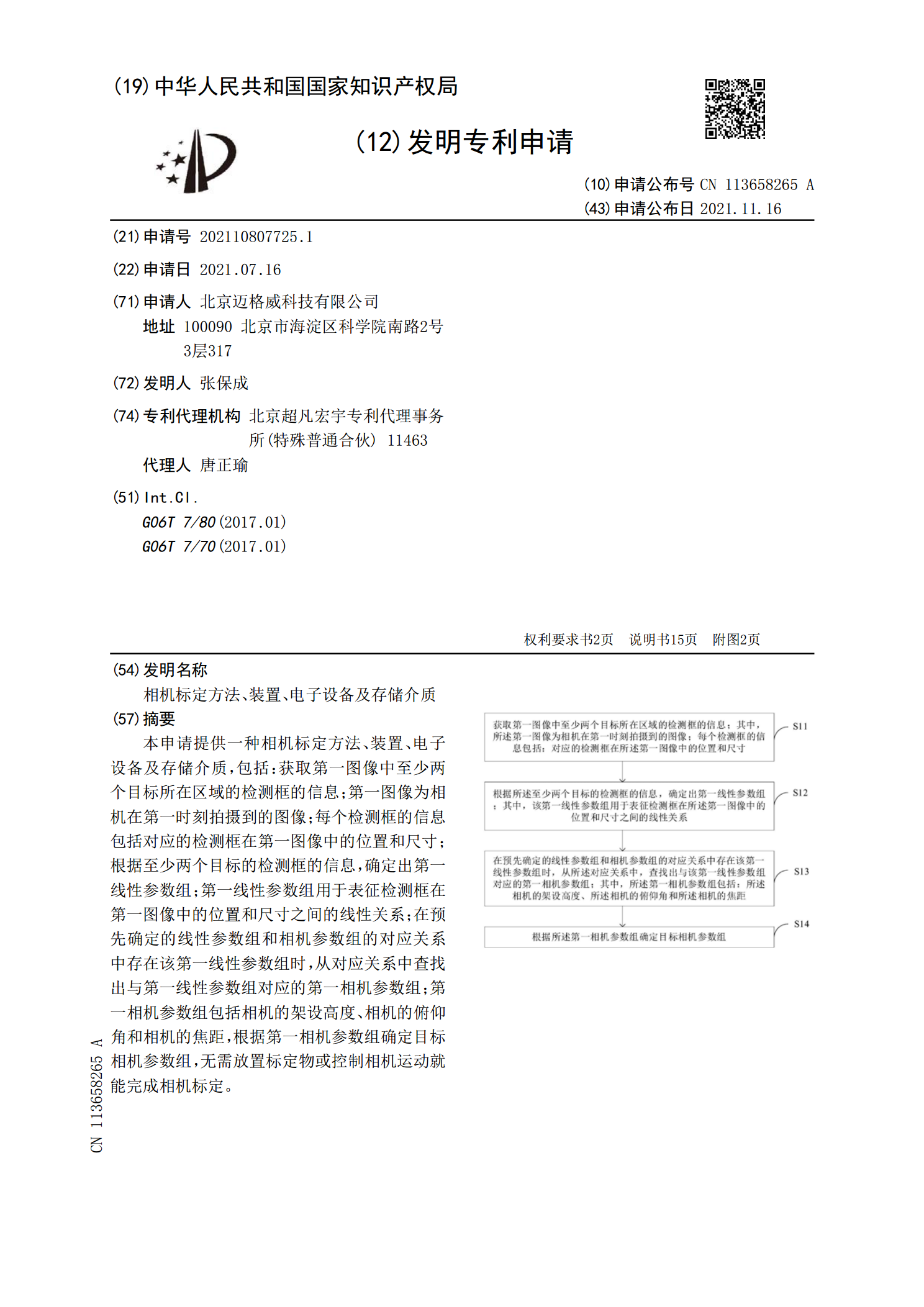
本申请提供一种相机标定方法、装置、电子设备及存储介质,包括:获取第一图像中至少两个目标所在区域的检测框的信息;第一图像为相机在第一时刻拍摄到的图像;每个检测框的信息包括对应的检测框在第一图像中的位置和尺寸;根据至少两个目标的检测框的信息,确定出第一线性参数组;第一线性参数组用于表征检测框在第一图像中的位置和尺寸之间的线性关系;在预先确定的线性参数组和相机参数组的对应关系中存在该第一线性参数组时,从对应关系中查找出与第一线性参数组对应的第一相机参数组;第一相机参数组包括相机的架设高度、相机的俯仰角和相机的焦
车辆相机的联合标定方法、电子设备、存储介质及车辆.pdf
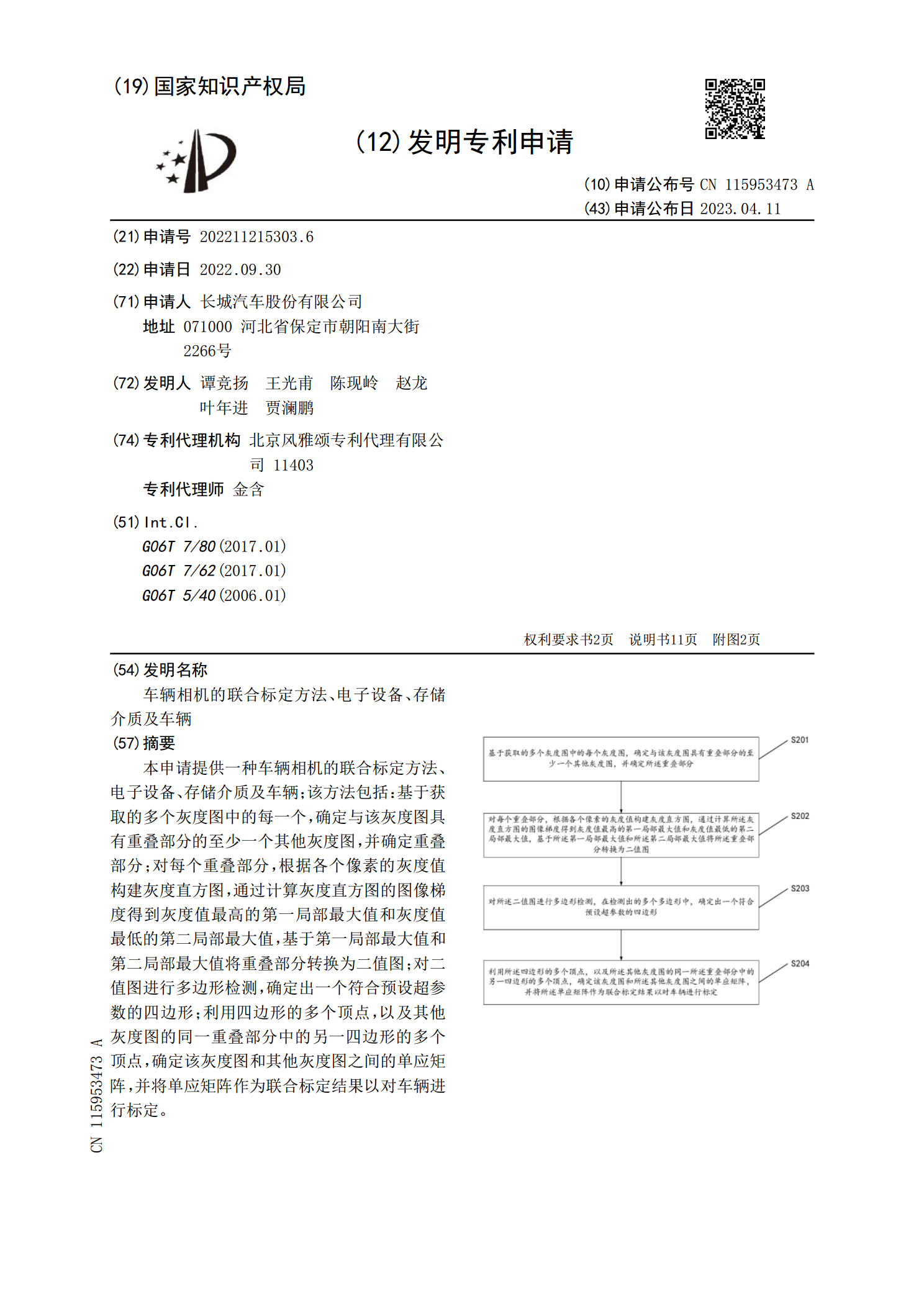
本申请提供一种车辆相机的联合标定方法、电子设备、存储介质及车辆;该方法包括:基于获取的多个灰度图中的每一个,确定与该灰度图具有重叠部分的至少一个其他灰度图,并确定重叠部分;对每个重叠部分,根据各个像素的灰度值构建灰度直方图,通过计算灰度直方图的图像梯度得到灰度值最高的第一局部最大值和灰度值最低的第二局部最大值,基于第一局部最大值和第二局部最大值将重叠部分转换为二值图;对二值图进行多边形检测,确定出一个符合预设超参数的四边形;利用四边形的多个顶点,以及其他灰度图的同一重叠部分中的另一四边形的多个顶点,确定该
相机外参标定方法、装置、电子设备及存储介质.pdf
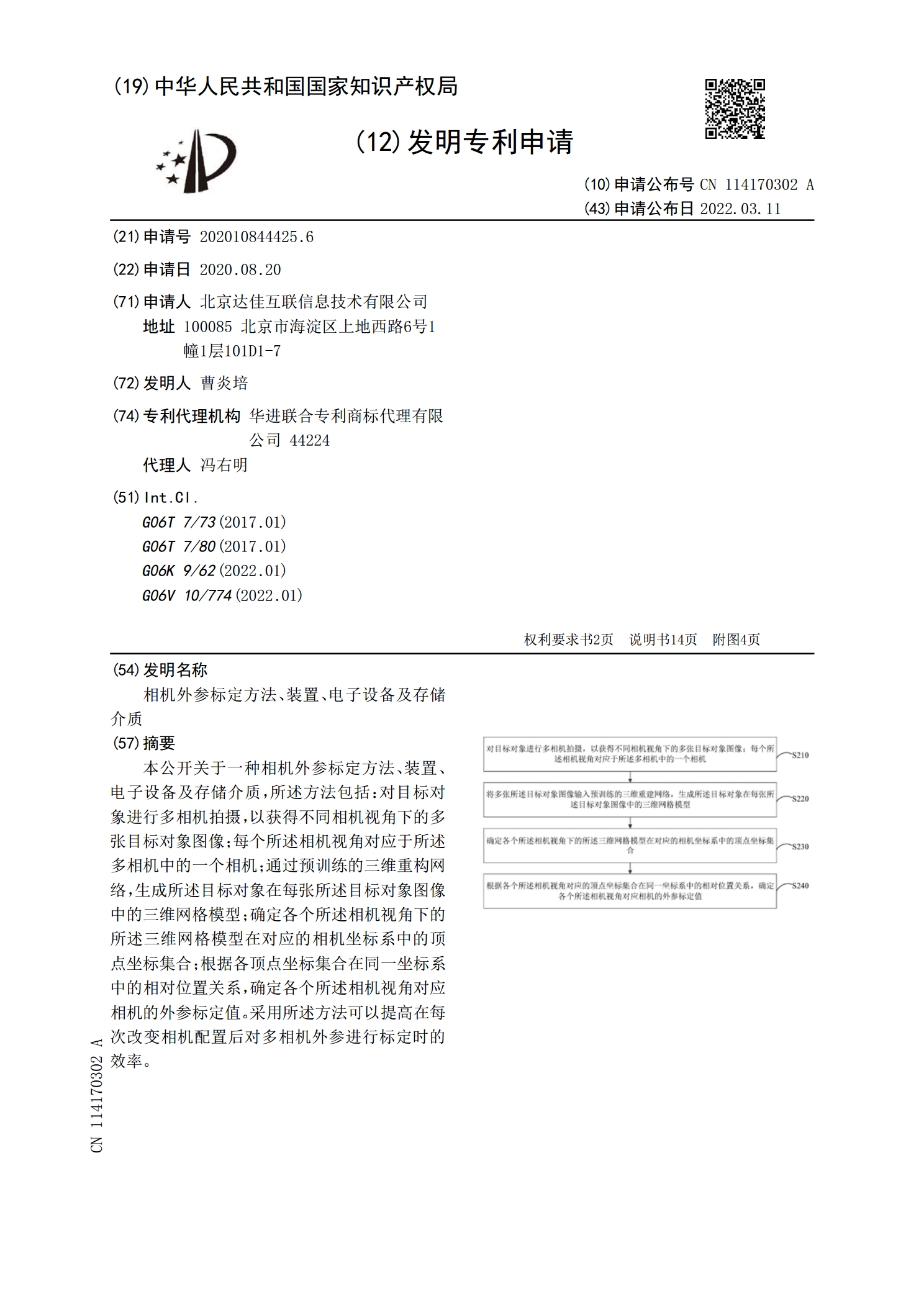
本公开关于一种相机外参标定方法、装置、电子设备及存储介质,所述方法包括:对目标对象进行多相机拍摄,以获得不同相机视角下的多张目标对象图像;每个所述相机视角对应于所述多相机中的一个相机;通过预训练的三维重构网络,生成所述目标对象在每张所述目标对象图像中的三维网格模型;确定各个所述相机视角下的所述三维网格模型在对应的相机坐标系中的顶点坐标集合;根据各顶点坐标集合在同一坐标系中的相对位置关系,确定各个所述相机视角对应相机的外参标定值。采用所述方法可以提高在每次改变相机配置后对多相机外参进行标定时的效率。
一种相机标定的方法、装置、电子设备及存储介质.pdf
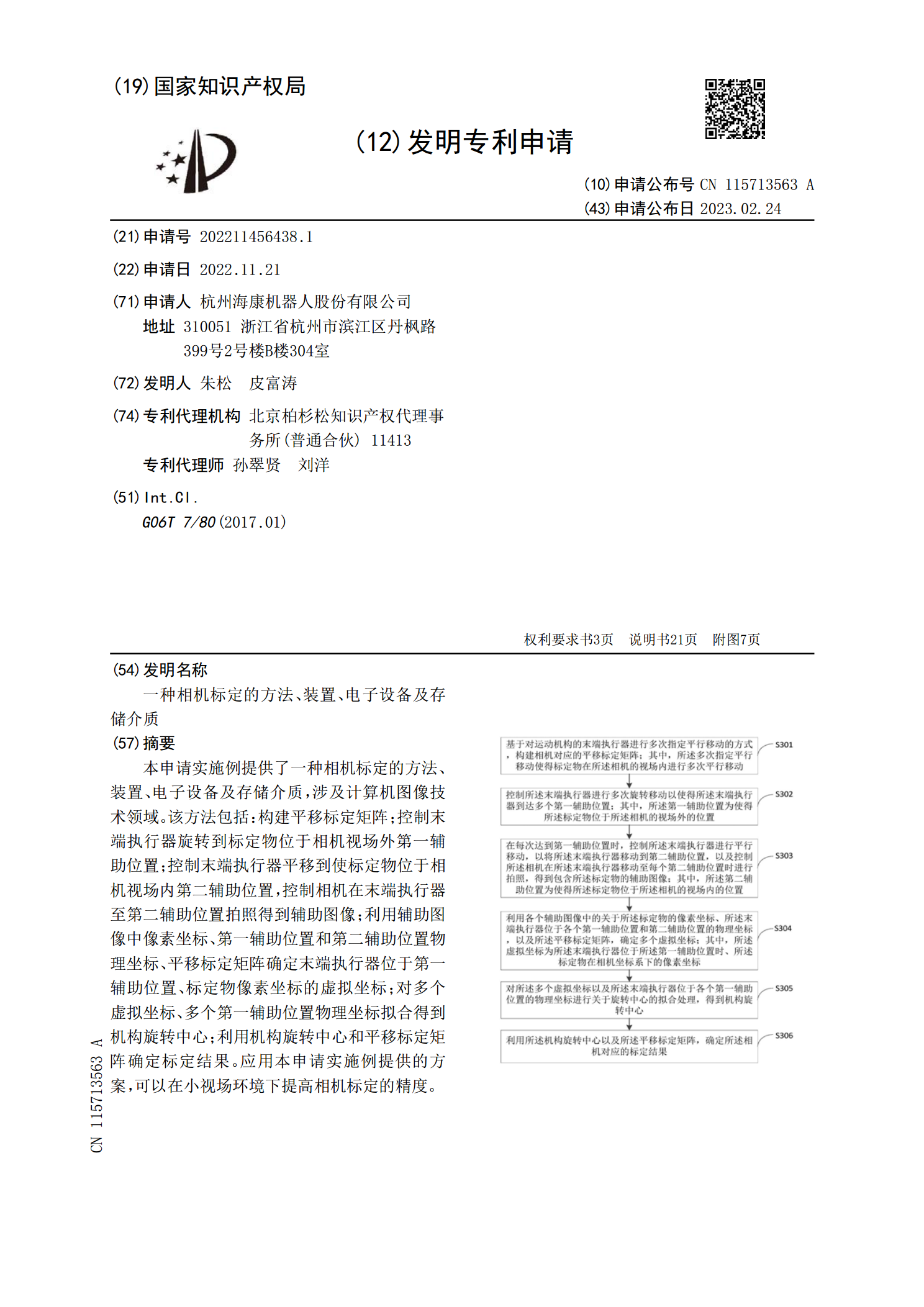
本申请实施例提供了一种相机标定的方法、装置、电子设备及存储介质,涉及计算机图像技术领域。该方法包括:构建平移标定矩阵;控制末端执行器旋转到标定物位于相机视场外第一辅助位置;控制末端执行器平移到使标定物位于相机视场内第二辅助位置,控制相机在末端执行器至第二辅助位置拍照得到辅助图像;利用辅助图像中像素坐标、第一辅助位置和第二辅助位置物理坐标、平移标定矩阵确定末端执行器位于第一辅助位置、标定物像素坐标的虚拟坐标;对多个虚拟坐标、多个第一辅助位置物理坐标拟合得到机构旋转中心;利用机构旋转中心和平移标定矩阵确定标定