
一种上料方法.pdf

a是****澜吖


1/8

2/8
3/8
4/8
5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种上料方法.pdf
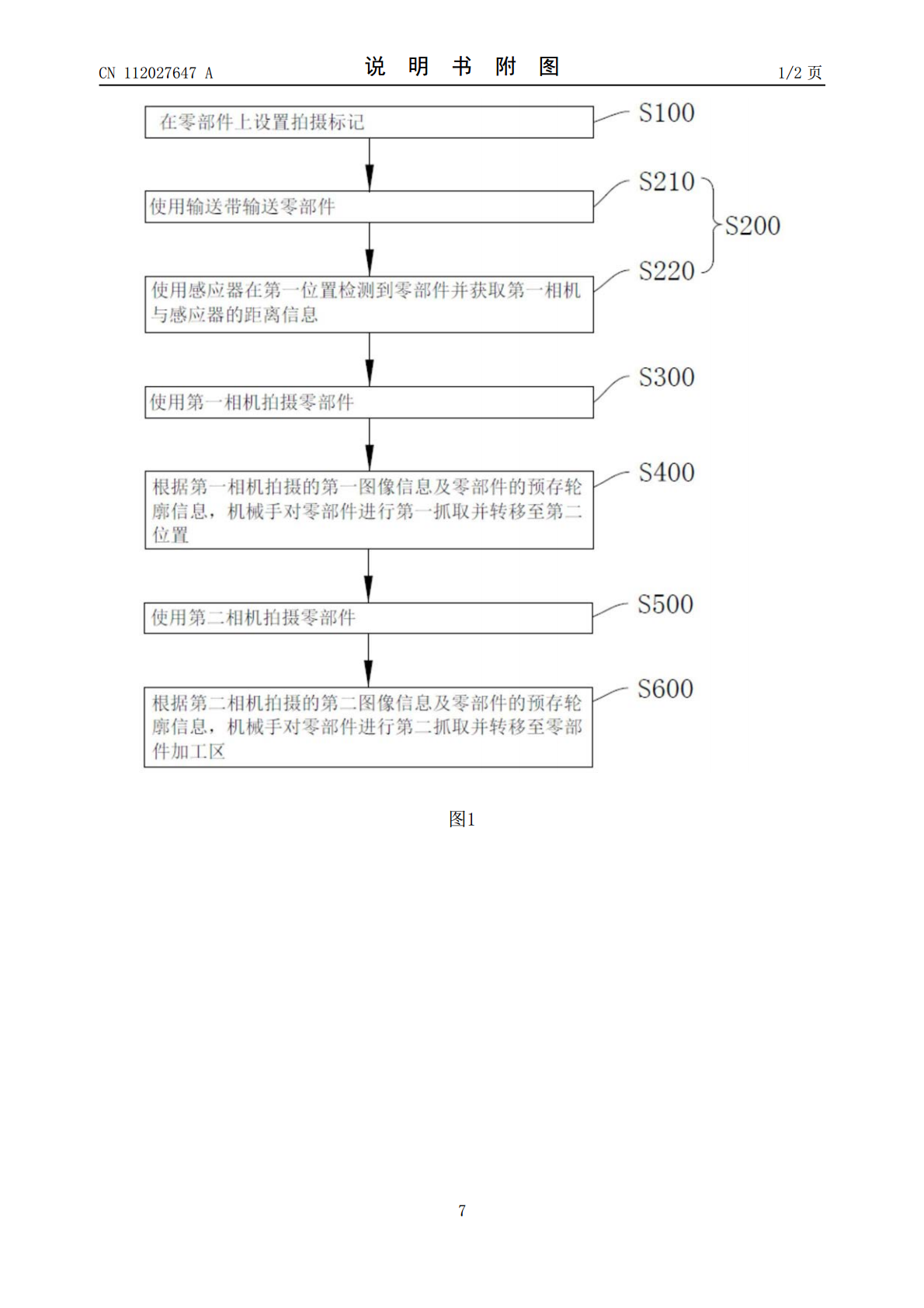
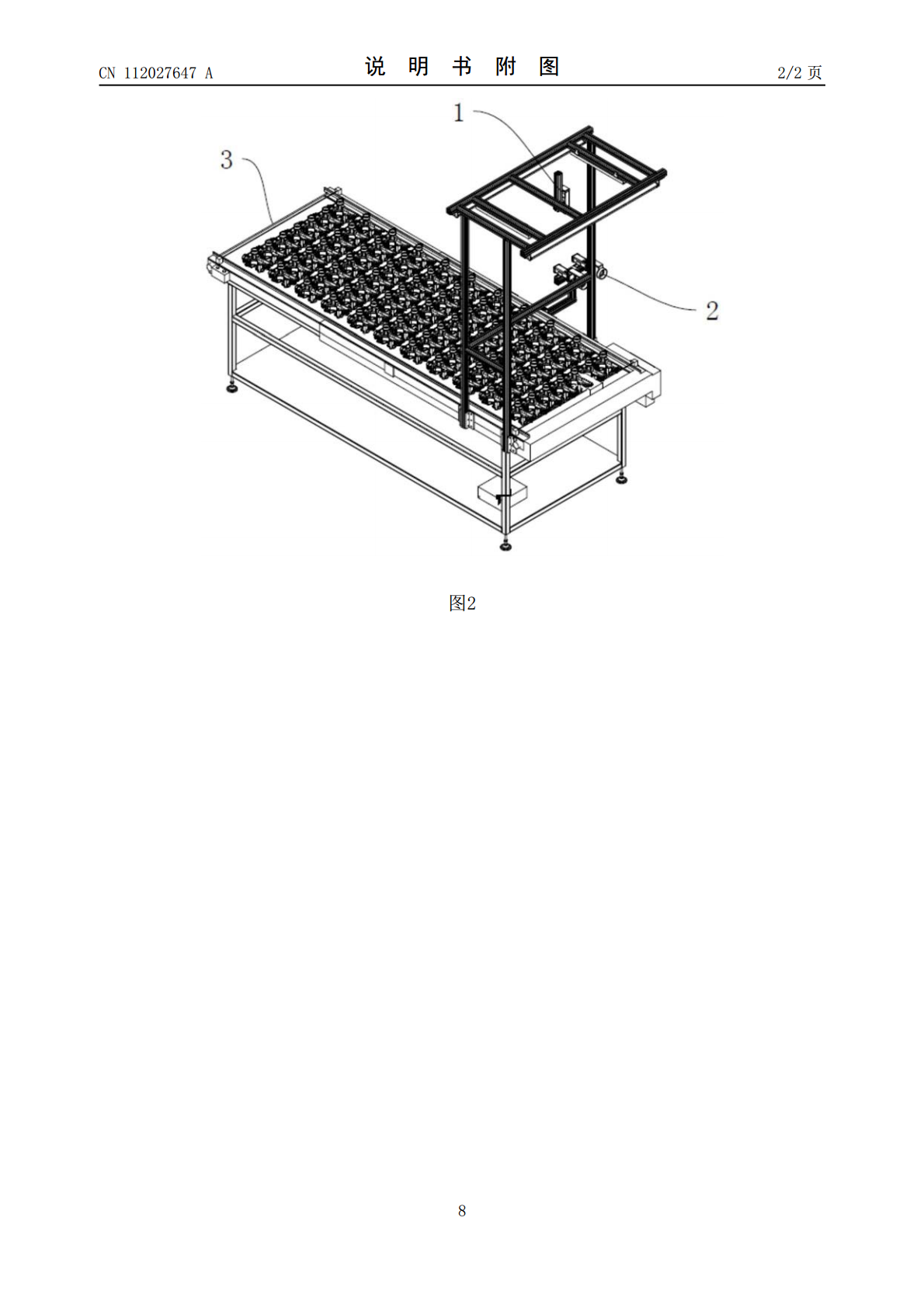
本发明公开了一种上料方法,包括以下步骤:输送零部件到第一位置;使用第一相机拍摄零部件;根据第一相机拍摄的第一图像信息及零部件的预存轮廓信息,机械手对零部件进行第一抓取并转移至第二位置;使用第二相机拍摄零部件;根据第二相机拍摄的第二图像信息及零部件的预存轮廓信息,机械手对零部件进行第二抓取并转移至零部件加工区;所述第一相机到所述第一位置的距离大于所述第二相机到所述第二位置的距离,所述第二相机的像素大于等于所述第一相机的像素。通过联合使用第一相机与第二相机,能够高效、精确地确定零部件的定位信息,提高机械手抓取
一种上料系统及上料方法.pdf
本发明涉及烟草包装技术领域,具体公开一种上料系统及上料方法。该上料系统包括承载装置、加工装置和转移装置,承载装置上承载有至少一种工件;加工装置包括与工件的种类数相等且一一对应的加工机构;转移装置包括转移机构和转移驱动机构,转移驱动机构包括转移升降驱动部和/或转移旋转驱动部,转移升降驱动部被配置为驱动转移机构升降,转移旋转驱动部被配置为驱动转移机构在水平面内旋转,转移机构能在转移升降驱动部和/或转移旋转驱动部的驱动作用下抓取承载装置上的工件并将其转移至对应的加工机构中。所述上料系统能够实现商标纸和条盒纸的自

一种上料装置及其控制方法.pdf
本发明涉及固体矿物制样领域,公开了一种上料装置及其控制方法,上料装置包括滑轨支架;提升斗,与滑轨支架的提升滑轨抵接且滑动连接,内部设有贯穿其上下两端的容置腔;卸料板,与提升斗枢接;第一滑轮,安装在卸料板上且与卸料板转动连接,第一滑轮与提升滑轨抵接且滑动连接,第一滑轮与提升滑轨抵接时,卸料板能够将容置腔的底部封堵;提升机构,与提升斗连接,且用于驱动提升斗沿提升滑轨滑动;卸料滑轨,水平设置,其一端与提升滑轨连接,第一滑轮与卸料滑轨滑动连接,且能够滑动到卸料滑轨上并与卸料滑轨抵接,当第一滑轮滑动到卸料滑轨上时,
一种上料装置、上料方法以及反应检测系统.pdf
本申请公开一种上料装置、上料方法以及反应检测系统。上料装置包括料仓和托板;料仓用于装设反应杯;托板设置成相对料仓做可升降运动,以用于将反应杯顶升,托板的顶部设置有用于承托反应杯斜躺的承托面,反应杯斜躺在承托面时能够朝向承托面的底端滑动。通过上述方案可以减少在对反应杯进行上料时的卡杯问题。
一种上料机的上料装置.pdf
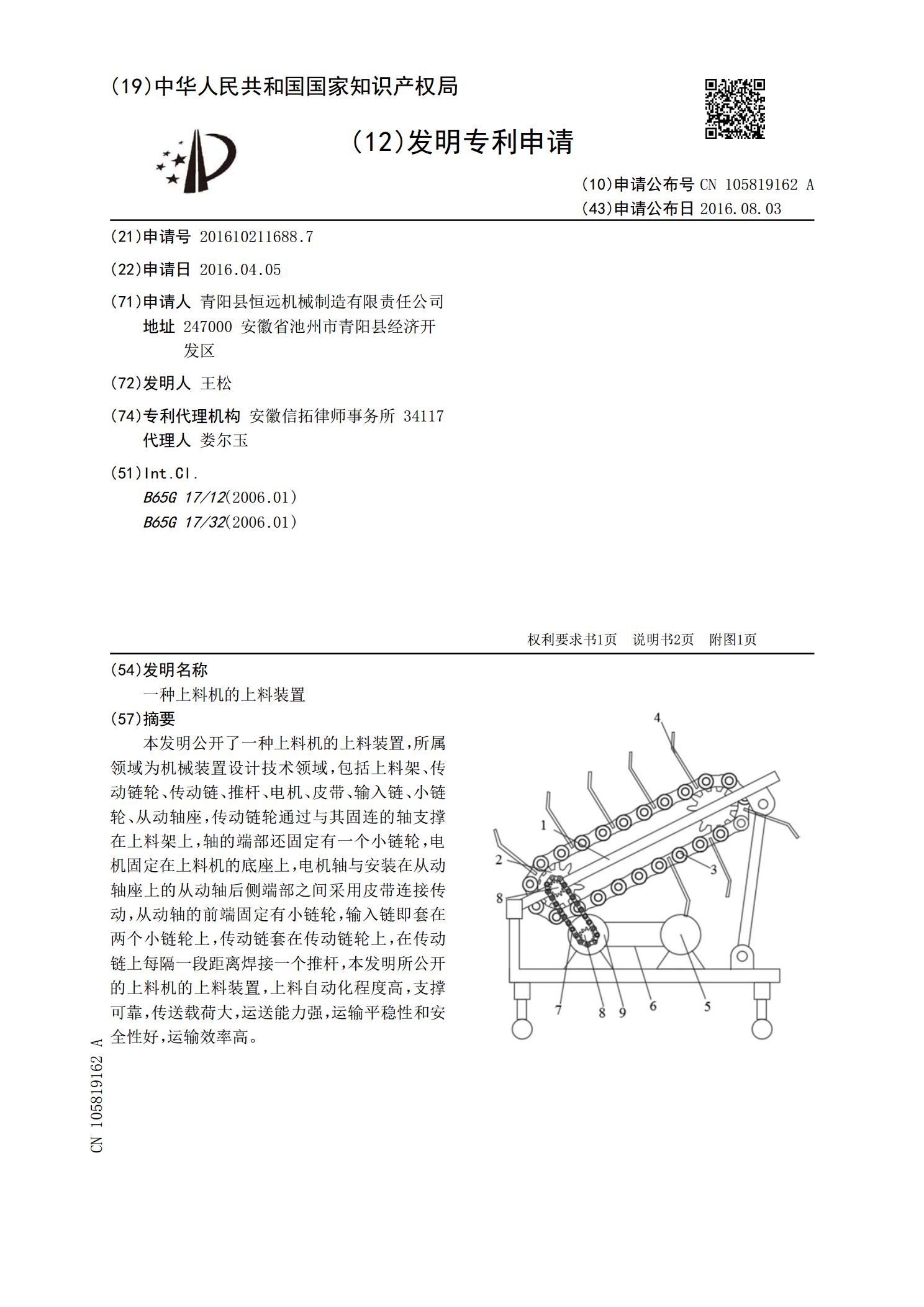
本发明公开了一种上料机的上料装置,所属领域为机械装置设计技术领域,包括上料架、传动链轮、传动链、推杆、电机、皮带、输入链、小链轮、从动轴座,传动链轮通过与其固连的轴支撑在上料架上,轴的端部还固定有一个小链轮,电机固定在上料机的底座上,电机轴与安装在从动轴座上的从动轴后侧端部之间采用皮带连接传动,从动轴的前端固定有小链轮,输入链即套在两个小链轮上,传动链套在传动链轮上,在传动链上每隔一段距离焊接一个推杆,本发明所公开的上料机的上料装置,上料自动化程度高,支撑可靠,传送载荷大,运送能力强,运输平稳性和安全性好