
一种用于船底清理的水下机器人.pdf

书生****22

1/10

2/10
3/10

4/10

5/10

6/10
7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于船底清理的水下机器人.pdf
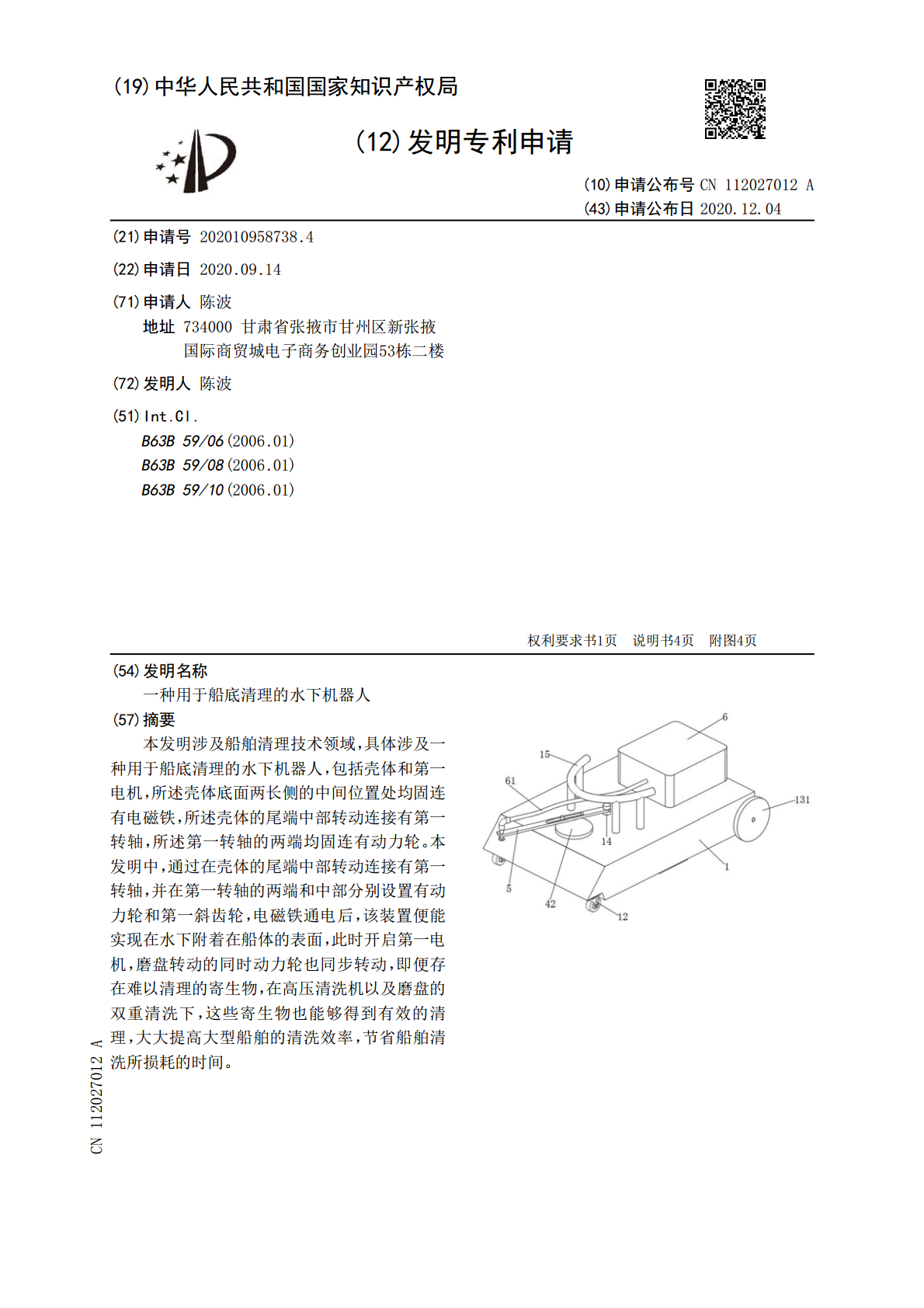
本发明涉及船舶清理技术领域,具体涉及一种用于船底清理的水下机器人,包括壳体和第一电机,所述壳体底面两长侧的中间位置处均固连有电磁铁,所述壳体的尾端中部转动连接有第一转轴,所述第一转轴的两端均固连有动力轮。本发明中,通过在壳体的尾端中部转动连接有第一转轴,并在第一转轴的两端和中部分别设置有动力轮和第一斜齿轮,电磁铁通电后,该装置便能实现在水下附着在船体的表面,此时开启第一电机,磨盘转动的同时动力轮也同步转动,即便存在难以清理的寄生物,在高压清洗机以及磨盘的双重清洗下,这些寄生物也能够得到有效的清理,大大提高
一种船底海生物清理水下机器人.pdf
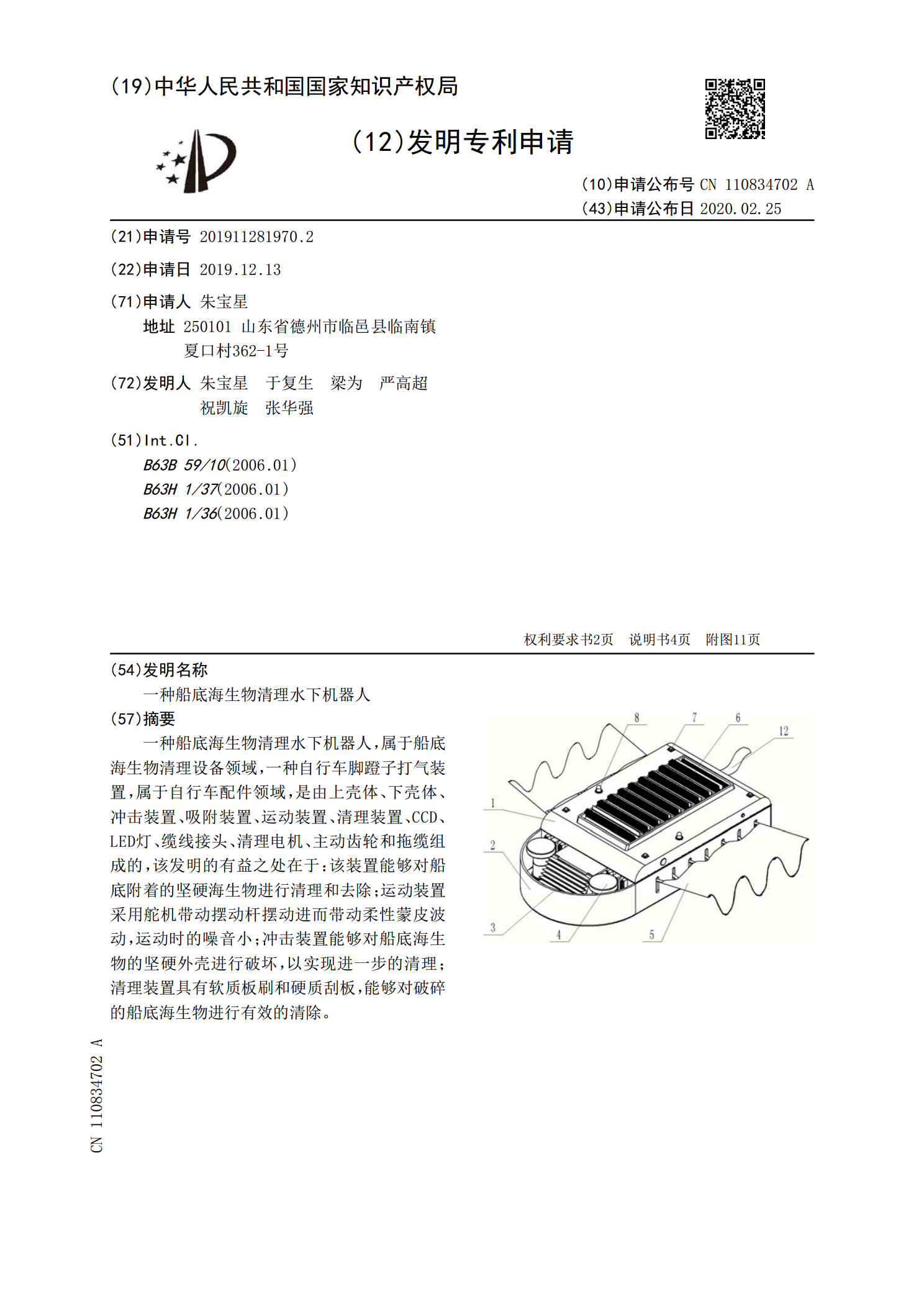
一种船底海生物清理水下机器人,属于船底海生物清理设备领域,一种自行车脚蹬子打气装置,属于自行车配件领域,是由上壳体、下壳体、冲击装置、吸附装置、运动装置、清理装置、CCD、LED灯、缆线接头、清理电机、主动齿轮和拖缆组成的,该发明的有益之处在于:该装置能够对船底附着的坚硬海生物进行清理和去除;运动装置采用舵机带动摆动杆摆动进而带动柔性蒙皮波动,运动时的噪音小;冲击装置能够对船底海生物的坚硬外壳进行破坏,以实现进一步的清理;清理装置具有软质板刷和硬质刮板,能够对破碎的船底海生物进行有效的清除。

一种水下船底清洁机器人.pdf
本发明公开一种水下船底清洁机器人,机架为双层甲板的方形结构,上层甲板和下层甲板通过六个圆形的固定轴连接为一个整体;六个支腿的结构原理相同,第一支腿、第三支腿、第五支腿安装于机架右侧并可前后摆动,第二支腿、第四支腿、第六支腿安装于机架左侧并可前后摆动,每个支腿均可通过负压作用吸附固定于船体表面,六个支腿的交替移动可实现机器人在船体表面的移动;转台安装于机架中心位置并可转动和定位,清除臂和打磨臂安装于转台上侧并可转动和定位,清除臂可将附着于船体的贝类铲除,打磨臂可将贝类残留的硬化粘结物去除,从而可使船底恢复光
一种用于水下检测的水下机器人.pdf
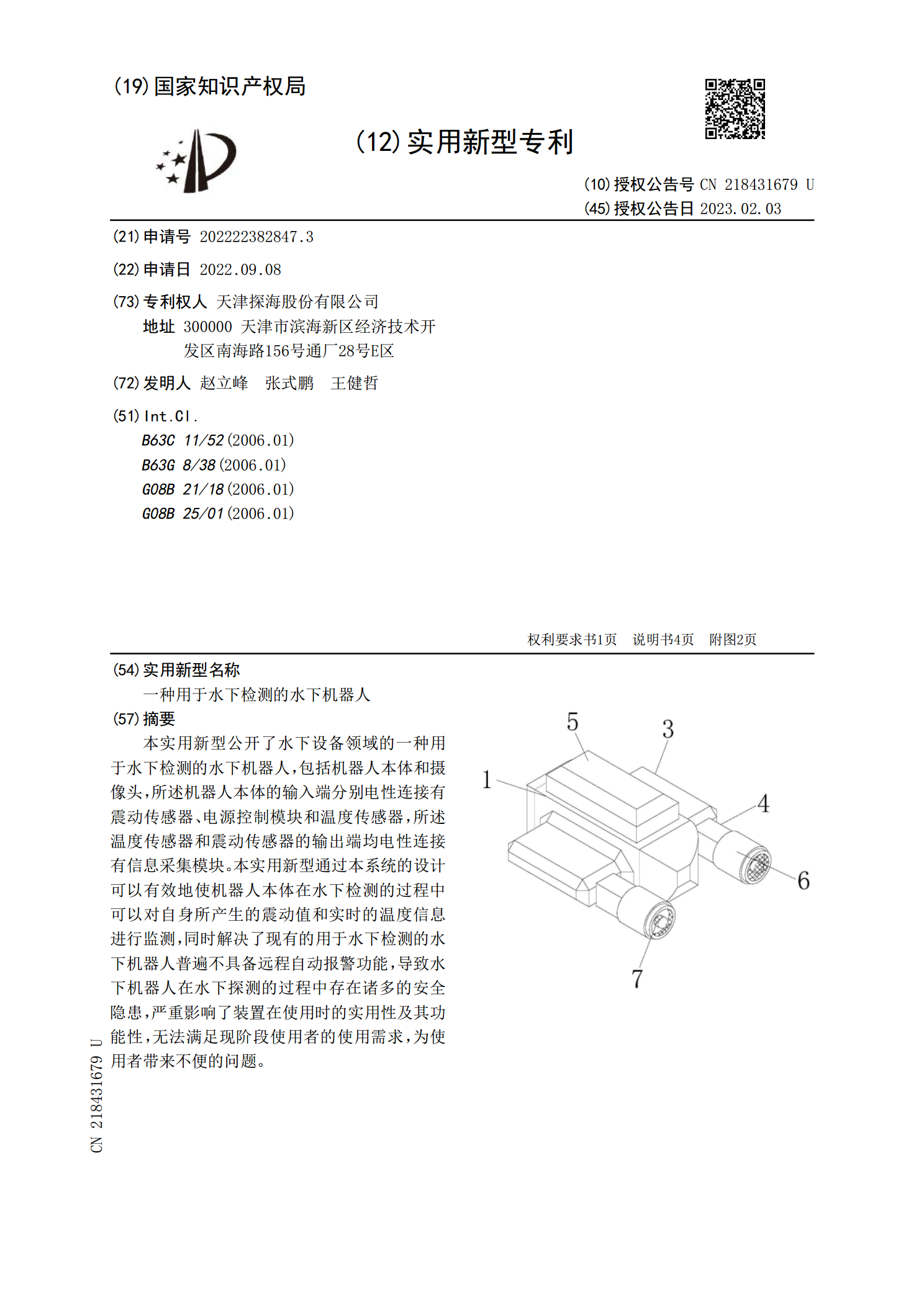
本实用新型公开了水下设备领域的一种用于水下检测的水下机器人,包括机器人本体和摄像头,所述机器人本体的输入端分别电性连接有震动传感器、电源控制模块和温度传感器,所述温度传感器和震动传感器的输出端均电性连接有信息采集模块。本实用新型通过本系统的设计可以有效地使机器人本体在水下检测的过程中可以对自身所产生的震动值和实时的温度信息进行监测,同时解决了现有的用于水下检测的水下机器人普遍不具备远程自动报警功能,导致水下机器人在水下探测的过程中存在诸多的安全隐患,严重影响了装置在使用时的实用性及其功能性,无法满足现阶段

一种船舶清理水下机器人.pdf
本实用新型涉及船舶清理技术领域,特别是涉及一种船舶清理水下机器人,其包括水下机器人、支架、驱动盘B、机械臂、限位板、液压缸、剪叉式支架和安装板。水下机器人上设置驱动盘A,驱动盘A驱动连接支架,支架上转动设置摄像机。驱动盘B驱动连接机械臂,机械臂的输出端设置打磨机。限位板对称设置在水下机器人上,限位板上设置由液压缸驱动的剪叉式支架,剪叉式支架驱动连接安装板。安装板上设置驱动箱,驱动箱上设置转向轮,且驱动箱上对称设置两组支撑轮,转向轮与支撑轮的弧面均设置电磁环。本实用新型通过电磁环与船体之间的吸附力将水下机器