
可探测生命的仿真滚地飞天蜘蛛救援机器人.pdf

Ch****91

1/10

2/10

3/10

4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
可探测生命的仿真滚地飞天蜘蛛救援机器人.pdf
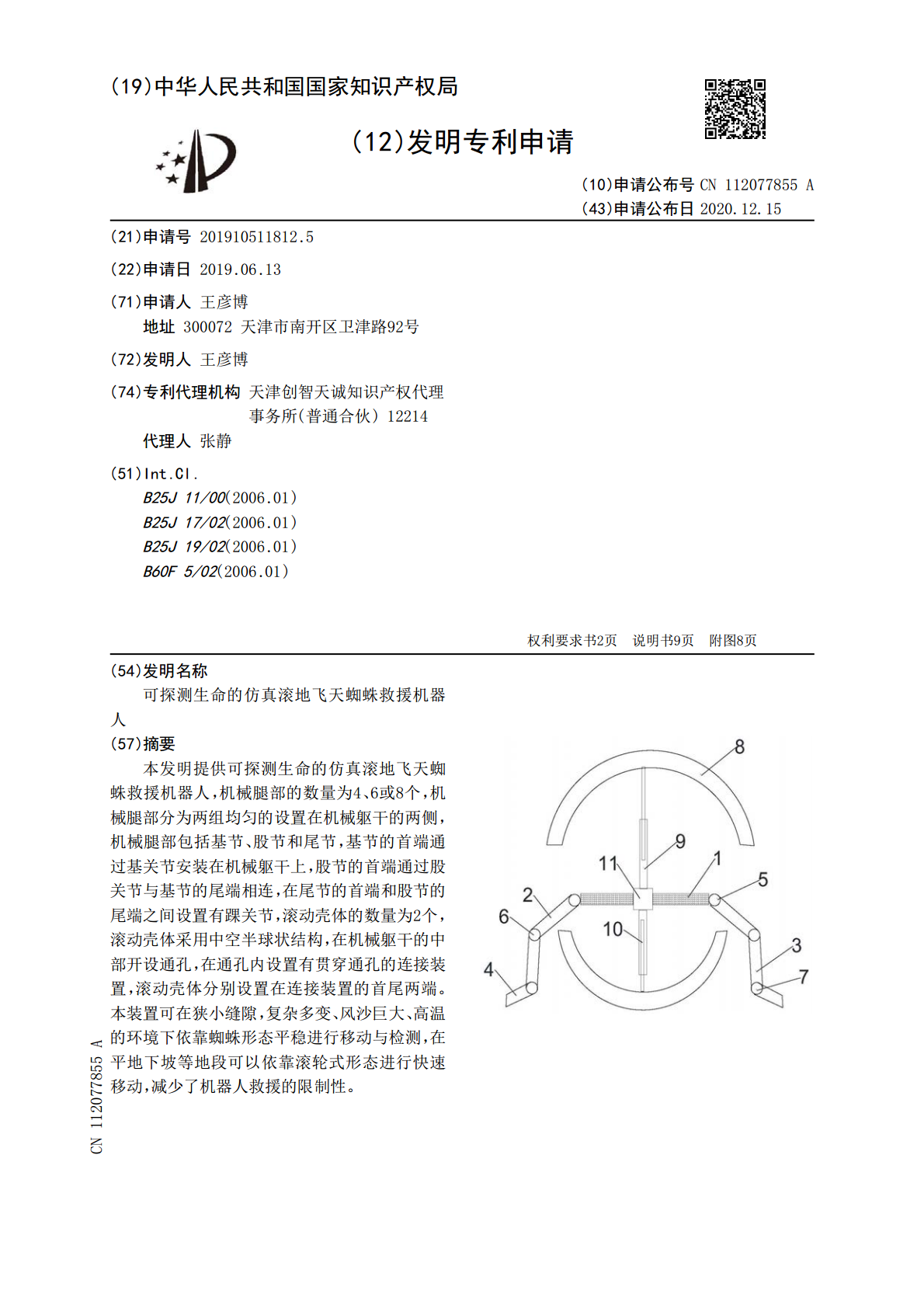
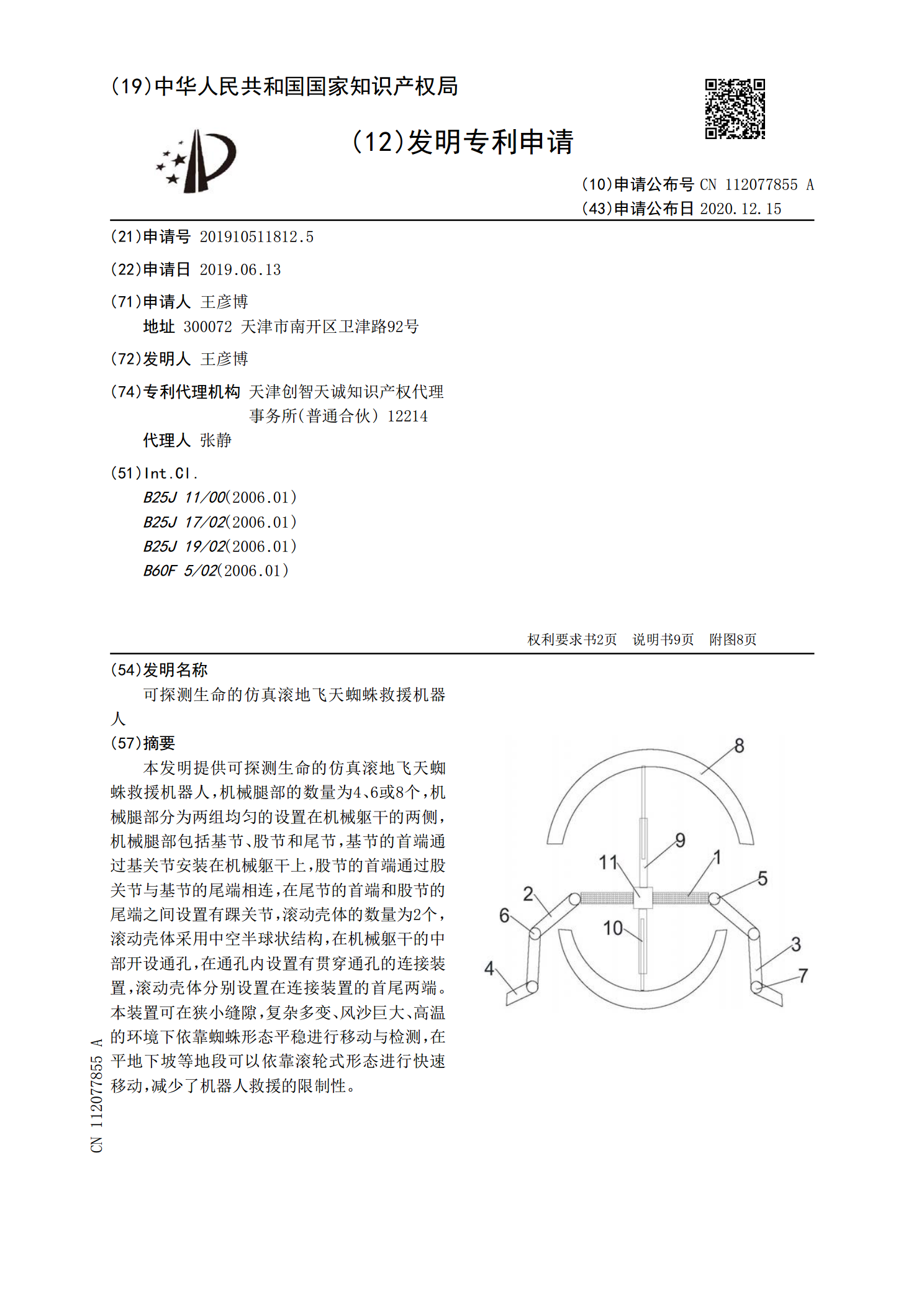
本发明提供可探测生命的仿真滚地飞天蜘蛛救援机器人,机械腿部的数量为4、6或8个,机械腿部分为两组均匀的设置在机械躯干的两侧,机械腿部包括基节、股节和尾节,基节的首端通过基关节安装在机械躯干上,股节的首端通过股关节与基节的尾端相连,在尾节的首端和股节的尾端之间设置有踝关节,滚动壳体的数量为2个,滚动壳体采用中空半球状结构,在机械躯干的中部开设通孔,在通孔内设置有贯穿通孔的连接装置,滚动壳体分别设置在连接装置的首尾两端。本装置可在狭小缝隙,复杂多变、风沙巨大、高温的环境下依靠蜘蛛形态平稳进行移动与检测,在平地

一种生命探测与救援机器人.pdf
本发明公开了一种生命探测与救援机器人,包括壳体、导向装置、行走装置、输料管、通话模块和与机器人配套使用的外部控制器,导向装置设置在壳体前端,壳体内腔设有微控制器和定位装置,输料管前端从导向装置穿出,后端通过壳体内腔从壳体尾部穿出,通话模块分别设置在导向装置内和壳体尾部,行走装置为陀螺轮,设置在壳体两侧。该机器人能在地震及灾后救援环境恶劣的情况下,完成对生命的寻找探测、位置确定以及实施多项救援等,而且体积微小,在救援过程中,即便机器人任意翻转滚动,也能在狭小空间继续行走,适应环境能力强。
一种可远程遥控的探测救援机器人.pdf
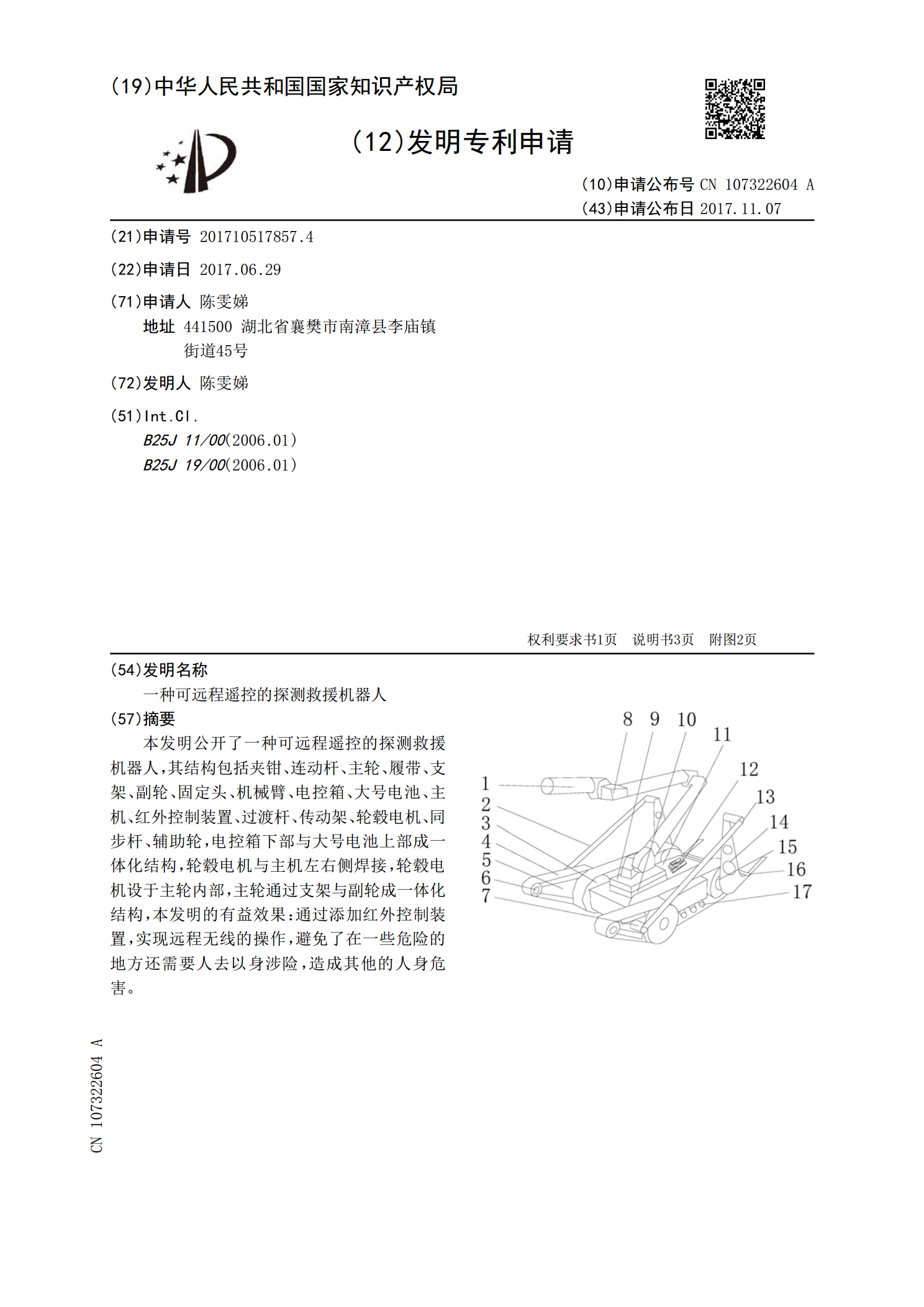
本发明公开了一种可远程遥控的探测救援机器人,其结构包括夹钳、连动杆、主轮、履带、支架、副轮、固定头、机械臂、电控箱、大号电池、主机、红外控制装置、过渡杆、传动架、轮毂电机、同步杆、辅助轮,电控箱下部与大号电池上部成一体化结构,轮毂电机与主机左右侧焊接,轮毂电机设于主轮内部,主轮通过支架与副轮成一体化结构,本发明的有益效果:通过添加红外控制装置,实现远程无线的操作,避免了在一些危险的地方还需要人去以身涉险,造成其他的人身危害。

蜘蛛探测仿生机器人.pdf
本发明涉及一种蜘蛛探测仿生机器人,蜘蛛腹状机身两侧装有三对仿昆虫机械爪,这三对仿昆虫机械仿生爪中有两对仿昆虫的机械跗节和一对能够清除障碍物的机械手;其中一对仿昆虫的机械跗节上装有机械爪;蜘蛛腹状机身内部装有微型摄像头、传感器、电源、无线控制装置。该机器人中间的一对机械足设计成机械手结构,能够很好的清除周围的障碍物。另外,前后两对跗足上都有车轮结构,可以实现在平坦的大路上高速行驶。腹部结构主要用来装载控制装置,芯片以及供电电源,内部还有摄像头,能够勘察前方的路况,传送图像信息。这种机器人可以应用于地震后灾区
一种可防火的探测救援救援机器人.pdf
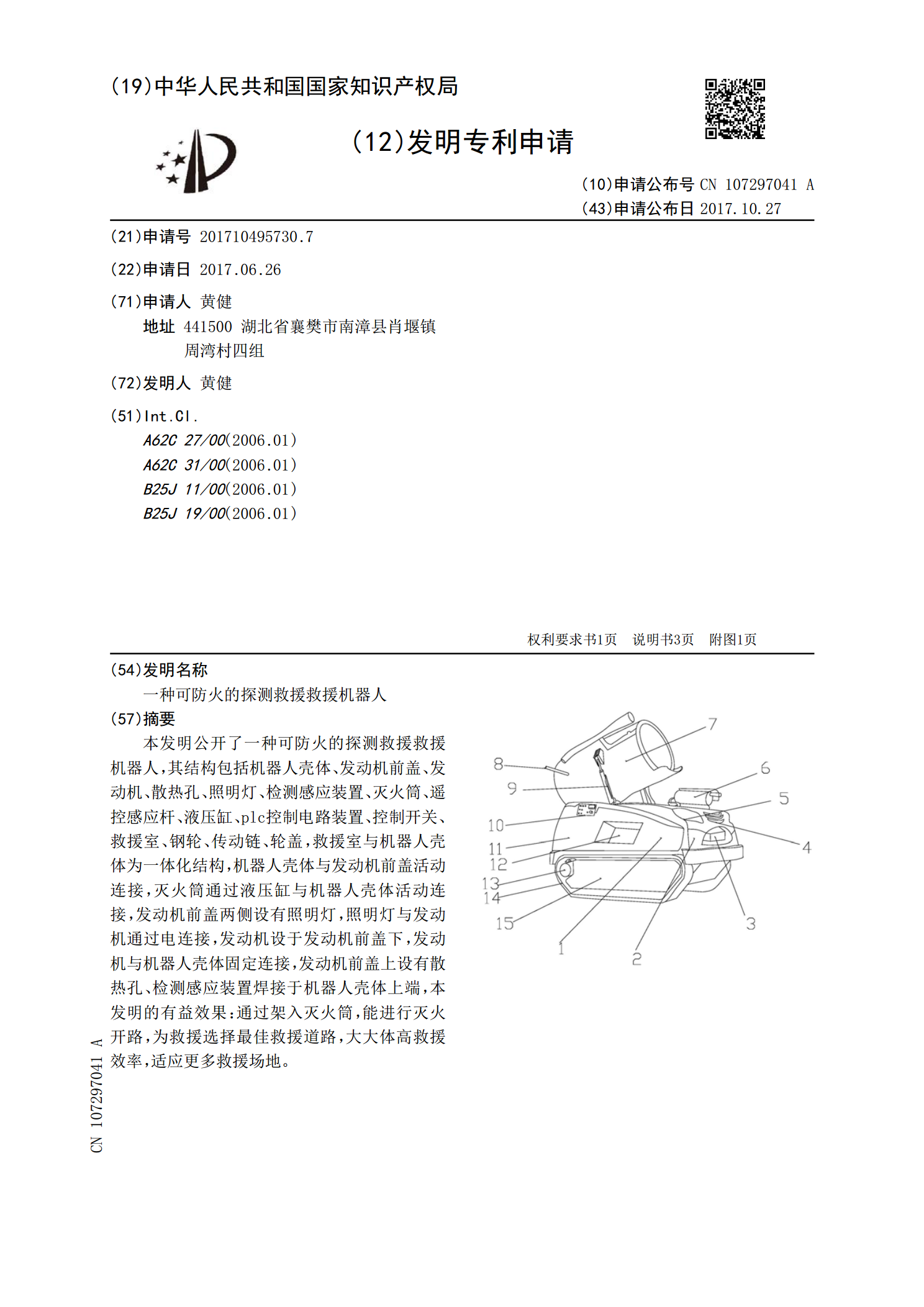
本发明公开了一种可防火的探测救援救援机器人,其结构包括机器人壳体、发动机前盖、发动机、散热孔、照明灯、检测感应装置、灭火筒、遥控感应杆、液压缸、plc控制电路装置、控制开关、救援室、钢轮、传动链、轮盖,救援室与机器人壳体为一体化结构,机器人壳体与发动机前盖活动连接,灭火筒通过液压缸与机器人壳体活动连接,发动机前盖两侧设有照明灯,照明灯与发动机通过电连接,发动机设于发动机前盖下,发动机与机器人壳体固定连接,发动机前盖上设有散热孔、检测感应装置焊接于机器人壳体上端,本发明的有益效果:通过架入灭火筒,能进行灭火