
线结构光测头外参数的精确标定方法.pdf

qw****27

1/6

2/6

3/6

4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
线结构光测头外参数的精确标定方法.pdf
..第41卷第8期机械工程学报Vo141N082005年8月CHINESEJOURNALOFMECHANICALENGINEERINGAug.2005线结构光测头外参数的精确标定方法’解则晓张成国(中国海洋大学工程学院青岛266071)张国雄(天津大学精密测试技术及仪器国家重点实验室天津300072)摘要:为了利用线结构光测头实现三维扫描测量,首先建立了将线结构光测头的二维测量数据转换为三维数据的变换矩阵;通过测量标准球确定球面上两圆弧之led’的距离与测量机扫描轴的移动距离之间存在线性关系,使得线,,结
正交型立体视觉结构的外参数标定方法.pdf
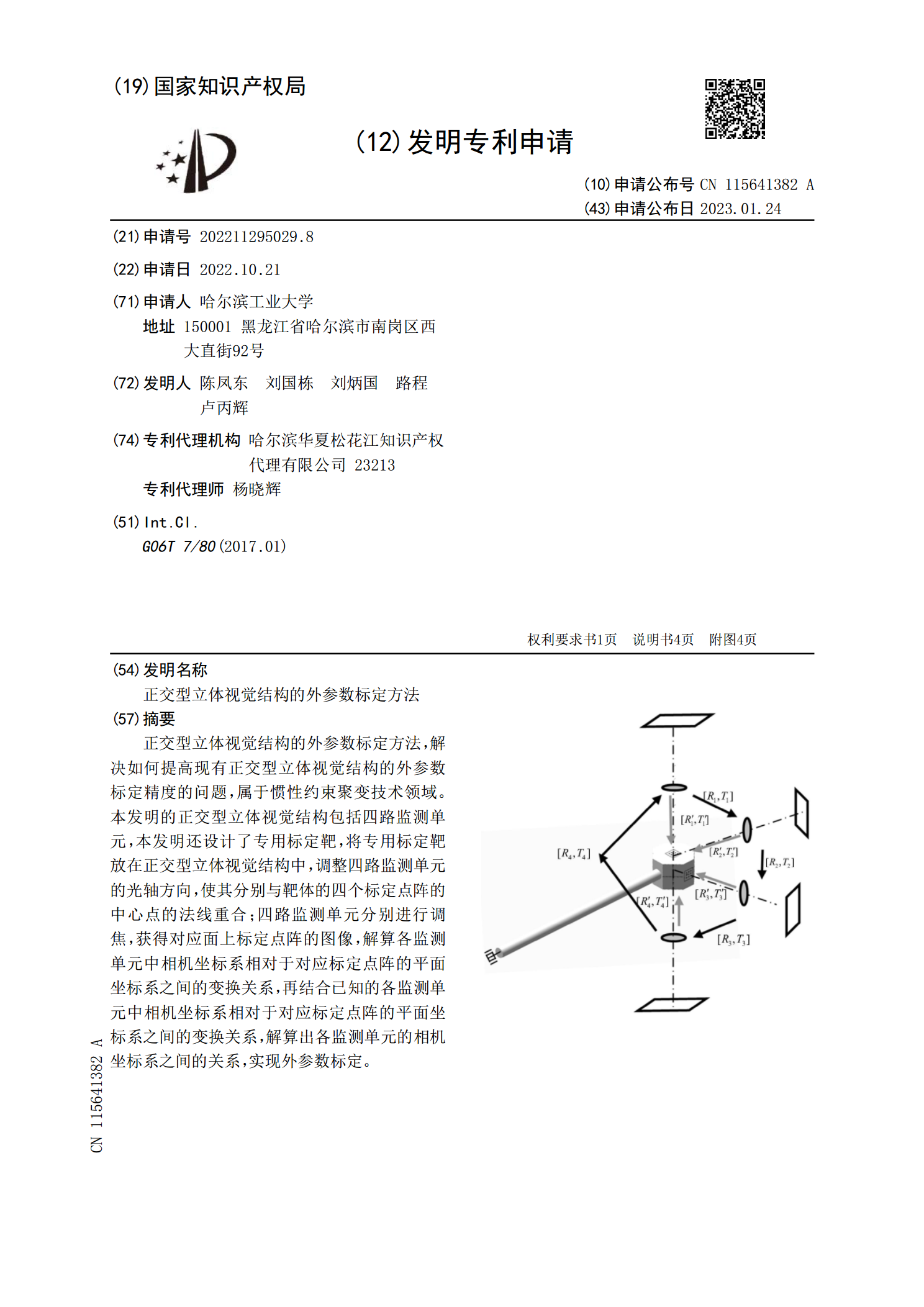
正交型立体视觉结构的外参数标定方法,解决如何提高现有正交型立体视觉结构的外参数标定精度的问题,属于惯性约束聚变技术领域。本发明的正交型立体视觉结构包括四路监测单元,本发明还设计了专用标定靶,将专用标定靶放在正交型立体视觉结构中,调整四路监测单元的光轴方向,使其分别与靶体的四个标定点阵的中心点的法线重合;四路监测单元分别进行调焦,获得对应面上标定点阵的图像,解算各监测单元中相机坐标系相对于对应标定点阵的平面坐标系之间的变换关系,再结合已知的各监测单元中相机坐标系相对于对应标定点阵的平面坐标系之间的变换关系,

钢轨匹配中的线结构光平面标定方法研究.docx
钢轨匹配中的线结构光平面标定方法研究钢轨匹配中的线结构光平面标定方法研究摘要:钢轨匹配是一项关键的任务,用于确定铁路轨道的几何形状,以提高铁路系统的安全性和效率。在钢轨匹配过程中,线结构光平面标定是一个重要的步骤,它可以准确地测量线结构光平面,以获得准确的轨道形状数据。本文通过研究不同的线结构光平面标定方法,分析其优缺点,并提出了一种基于特征点匹配的线结构光平面标定方法。实验结果表明,该方法具有较高的准确性和鲁棒性,可有效应用于钢轨匹配中的线结构光平面标定。第一节:引言随着铁路交通的发展,钢轨匹配成为铁路
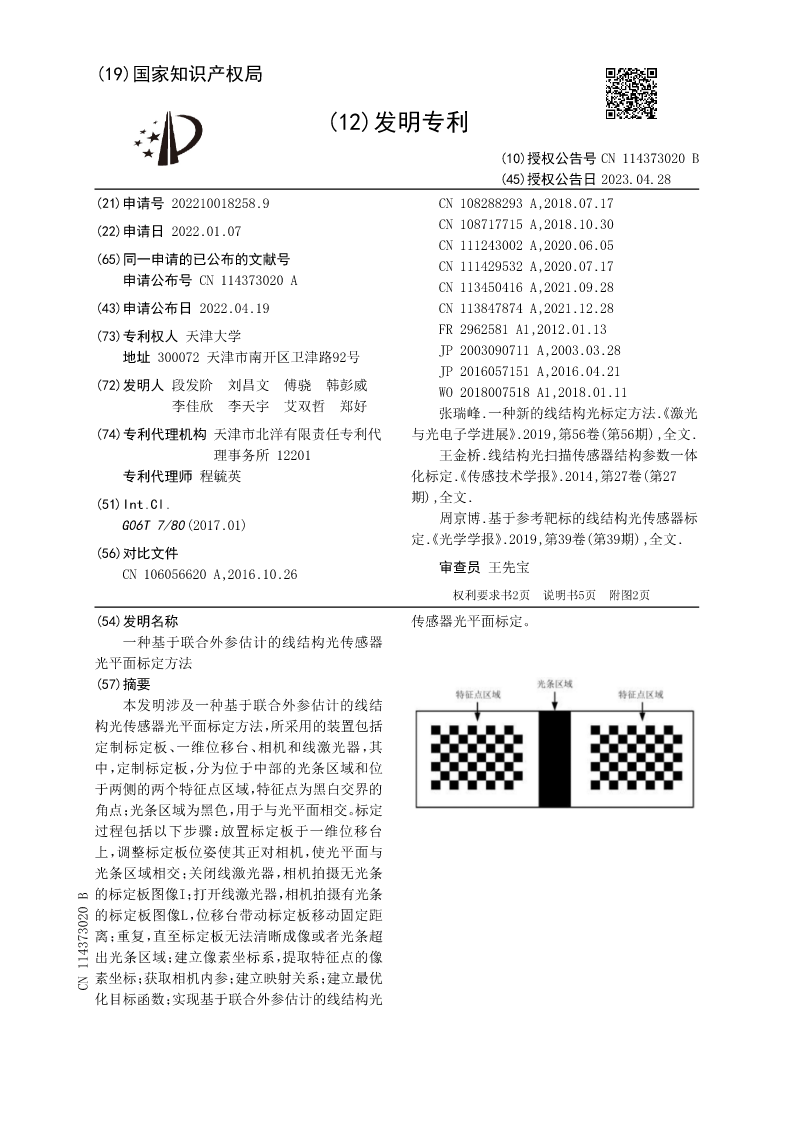
2022100182589一种基于联合外参估计的线结构光传感器光平面标定方法.pdf

一种基于线结构光检测物标定方法.pdf
本发明公开了一种基于线结构光检测物标定方法,包括首先对采集数据的线结构光轮廓仪位姿标定,以及对用于安装被检测物可转动的转台面标定,减少检测装置安装带来的误差;其次采用被检测物自身的两个竖直平整的面为标定基准,对被检测物轴线标定,然后对被检测物的一个水平面标定,以及通过被检测物的曲线特征对转台Z轴标定,本发明通过检测物自身的曲线特征对转台轴线标定,减少了引入其他标准球等标定物建立坐标系产生的误差,减少数据传递从而减少误差。