
AGV无人搬运车故障维修方案设计.pdf

靖烟****魔王


1/10
2/10

3/10

4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
AGV无人搬运车故障维修方案设计.pdf
题目:AGV无人搬运车故障维修方案设计目录1.任务背景............................................................11.1设备简介........................................................11.2设备故障现象.....................................................22.设备工作原理和故障原因分析.........................

AGV无人搬运车故障维修方案设计.pdf
题目:AGV无人搬运车故障维修方案设计目录1.任务背景............................................................11.1设备简介........................................................11.2设备故障现象.....................................................22.设备工作原理和故障原因分析.........................

AGV无人搬运车故障维修方案设计.pdf
题目:AGV无人搬运车故障维修方案设计目录1.任务背景............................................................11.1设备简介........................................................11.2设备故障现象.....................................................22.设备工作原理和故障原因分析.........................
一种无人AGV迷你搬运车.pdf
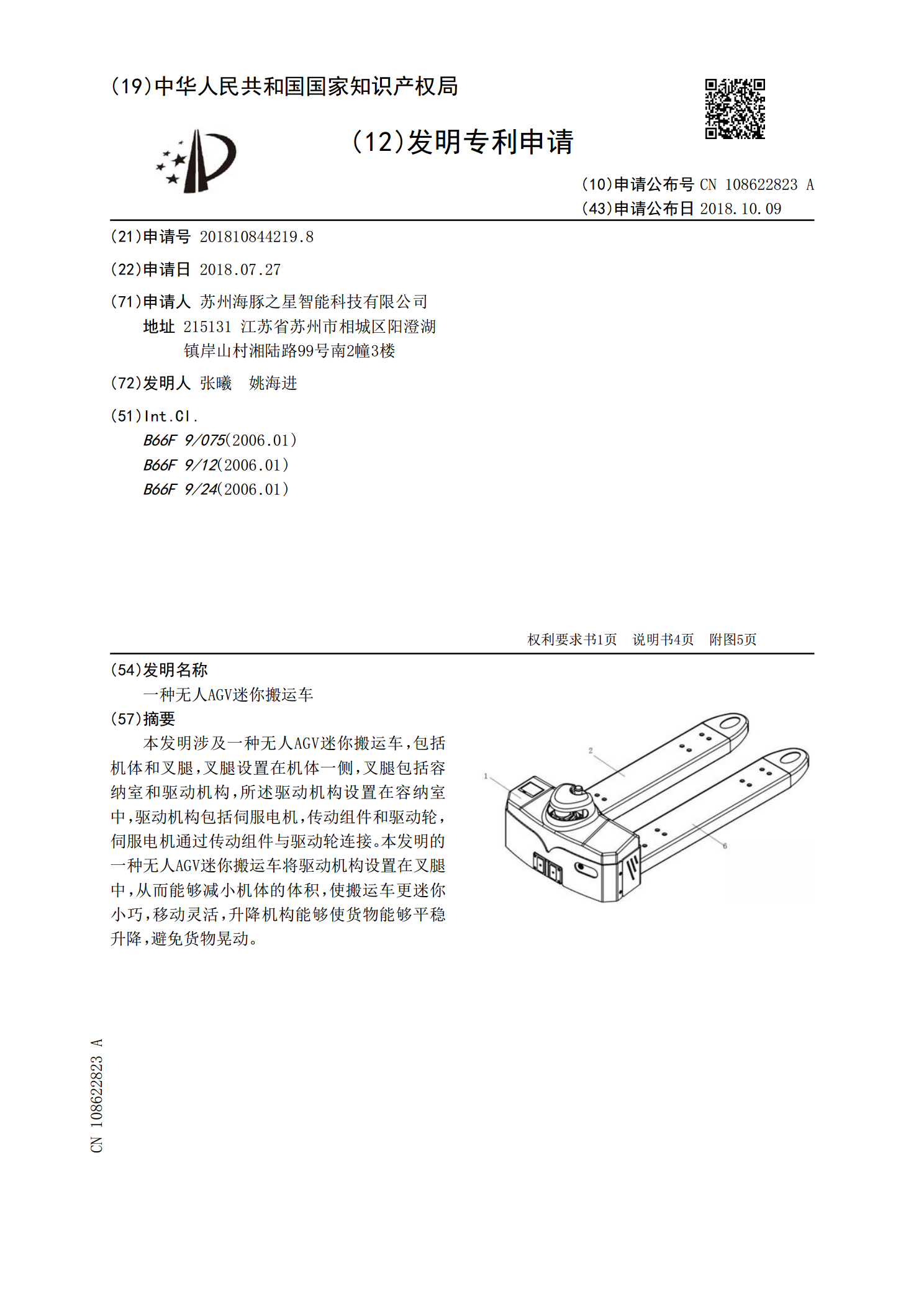
本发明涉及一种无人AGV迷你搬运车,包括机体和叉腿,叉腿设置在机体一侧,叉腿包括容纳室和驱动机构,所述驱动机构设置在容纳室中,驱动机构包括伺服电机,传动组件和驱动轮,伺服电机通过传动组件与驱动轮连接。本发明的一种无人AGV迷你搬运车将驱动机构设置在叉腿中,从而能够减小机体的体积,使搬运车更迷你小巧,移动灵活,升降机构能够使货物能够平稳升降,避免货物晃动。

一种拖拽式AGV智能无人搬运车挂载装置.pdf
一种拖拽式AGV智能无人搬运车挂载装置,挂钩部分由转动挂钩、棘轮、连杆A、连杆B、扭簧、固定板、连杆C、重力摆锤、万向滚珠、连杆箱组成;挂载箱部分由斜坡A、斜坡B、斜坡形挡板组成,挂钩部分通过转动挂钩前端的万向滚珠卡入挂载箱部分的斜坡A与斜坡B之间空间,当AGV无人搬运车车上的挂钩通过挂载箱上的斜坡型挡板进入挂载箱时,其拖拽式货物车在牵引力及扭簧的共同作用下,实现稳定的自动挂载作用;当AGV小车后退固定距离时,挂钩在万向滚珠作用下通过斜坡,挂钩向上转动,在扭簧作用下通过挂载箱斜坡型挡板发生扭转,从而使挂钩