
双轮差速驱动式移动机器人运动规划.pdf

qw****27

1/4
2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
双轮差速驱动式移动机器人运动规划.pdf
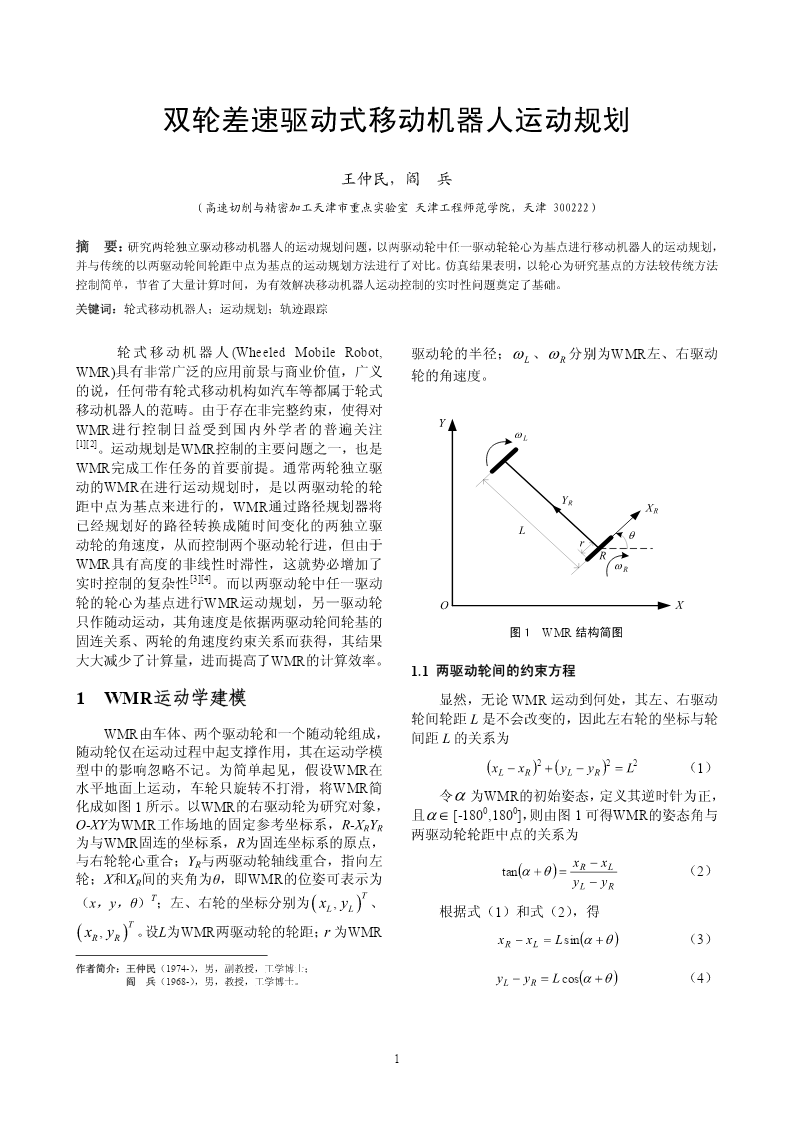
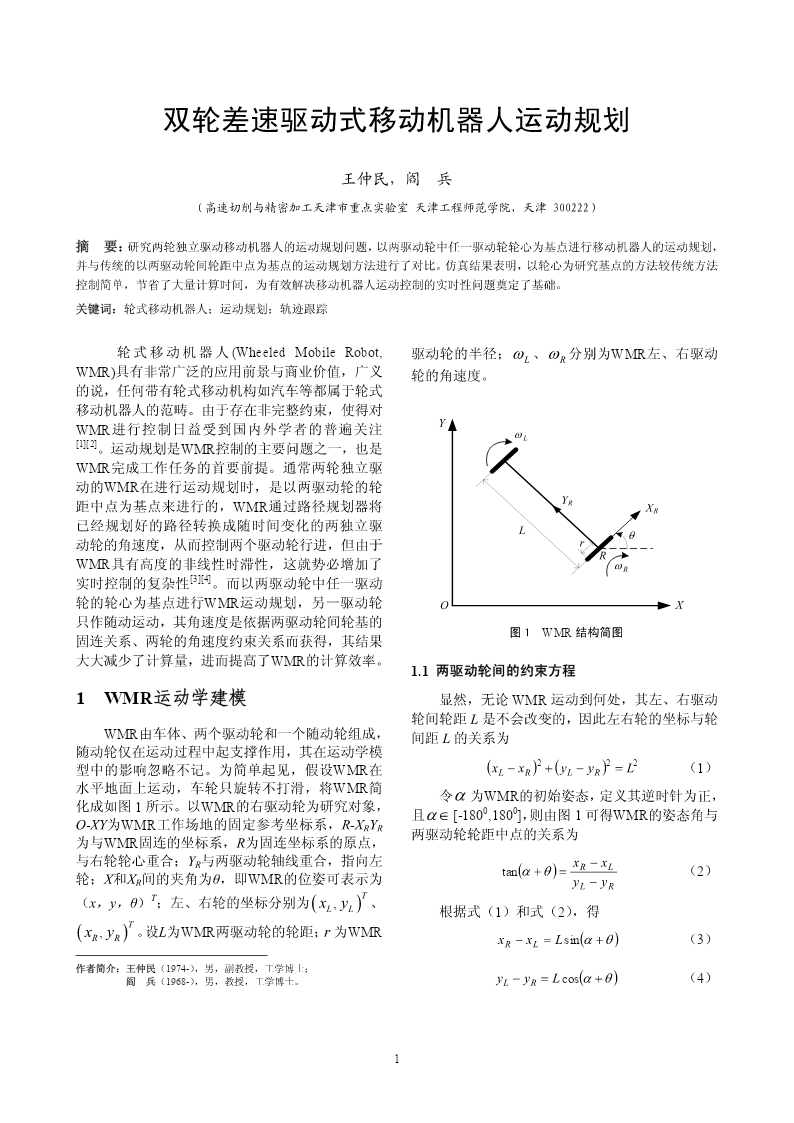
双轮差速驱动式移动机器人运动规划王仲民,阎兵(高速切削与精密加工天津市重点实验室天津工程师范学院,天津300222)摘要:研究两轮独立驱动移动机器人的运动规划问题,以两驱动轮中任一驱动轮轮心为基点进行移动机器人的运动规划,并与传统的以两驱动轮间轮距中点为基点的运动规划方法进行了对比。仿真结果表明,以轮心为研究基点的方法较传统方法控制简单,节省了大量计算时间,为有效解决移动机器人运动控制的实时性问题奠定了基础。关键词:轮式移动机器人;运动规划;轨迹跟踪1轮式移动机器人(WheeledMobileRobot,
双轮差速驱动轮.pdf
本发明双轮差速驱动轮,包括电机及支架组件、对称设置于电机及支架组件两侧的且均与电机及支架组件配合使用的单侧驱动轮组件和单侧随动轮组件,电机及支架组件连接有减速箱组件,减速箱组件与单侧驱动轮组件相对应相配合使用。本发明在电机及支架组件两侧分别安装一个单侧驱动轮和单侧随动轮,使得驱动轮有两个轮子同时承受载荷,提高了驱动轮的承载能力;单侧驱动轮和单侧随动轮位于驱动轮转盘组件中心两侧,在转向时两轮可通过差速旋转,把单轮转向时与地面的滑动摩擦改进为双轮与地面的滚动摩擦,减小轮胎磨损,降低转向电机所需功率。
双轮差速转向驱动轮.pdf
本发明双轮差速转向驱动轮,包括双轮差速驱动轮和与双轮差速驱动轮对应设置且相配合使用的驱动轮转盘组件;双轮差速驱动轮包括电机及支架组件、对称设置于电机及支架组件两侧的且均与电机及支架组件配合使用的单侧驱动轮组件和单侧随动轮组件,电机及支架组件连接有减速箱组件,减速箱组件与单侧驱动轮组件相对应相配合使用。本发明在电机及支架组件两侧分别安装一个单侧驱动轮和单侧随动轮,使得驱动轮有两个轮子同时承受载荷,提高了驱动轮的承载能力;单侧驱动轮和单侧随动轮位于驱动轮转盘组件中心两侧,在转向时两轮可通过差速旋转,把单轮转向

双轮驱动系统差速控制方法及系统.pdf
本发明公开了一种双轮驱动系统差速控制方法及系统,其中方法包括以下步骤:采集踏板输入指令,并根据踏板输入指令计算输入转矩指令;根据速度传感器反馈的转速信号计算车体前进标志位;根据输入转矩指令、标志位以及反馈的实际转矩,计算转矩给定参考值;根据转矩给定参考值计算判断标志;根据判断标识计算转矩增量,以增加或者减小驱动扭矩;根据转矩增量计算转矩给定计算值,并根据该转矩给定计算值和驱动力矩限制,确定转矩给定目标值;将转矩给定目标值输出给电机及其控制器,以驱动相应的驱动轮。本发明可使车体在各种工况下,无需转向信号,就
一种行走轮双轮驱动差速装置.pdf
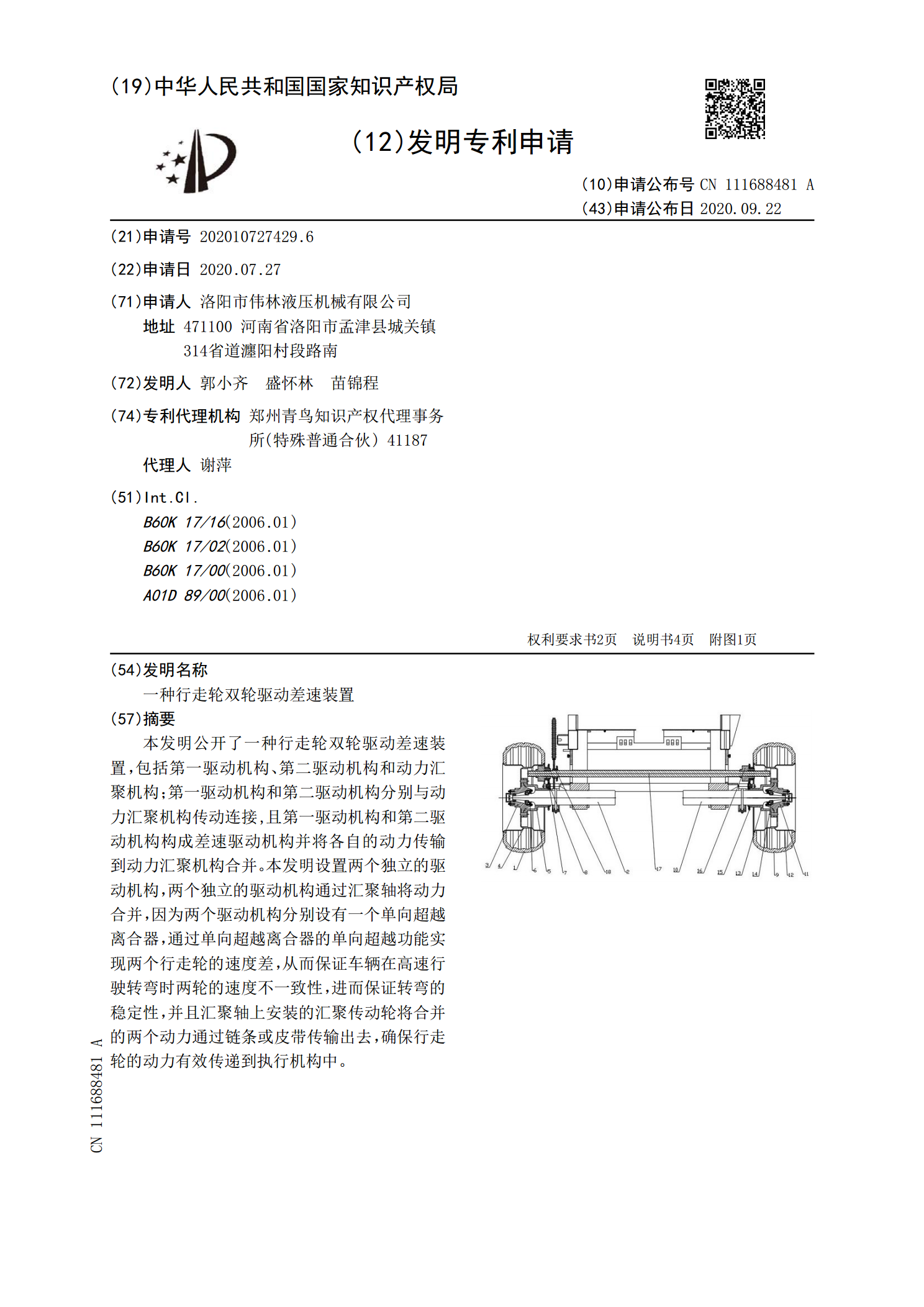
本发明公开了一种行走轮双轮驱动差速装置,包括第一驱动机构、第二驱动机构和动力汇聚机构;第一驱动机构和第二驱动机构分别与动力汇聚机构传动连接,且第一驱动机构和第二驱动机构构成差速驱动机构并将各自的动力传输到动力汇聚机构合并。本发明设置两个独立的驱动机构,两个独立的驱动机构通过汇聚轴将动力合并,因为两个驱动机构分别设有一个单向超越离合器,通过单向超越离合器的单向超越功能实现两个行走轮的速度差,从而保证车辆在高速行驶转弯时两轮的速度不一致性,进而保证转弯的稳定性,并且汇聚轴上安装的汇聚传动轮将合并的两个动力通过