
四旋翼飞行器的控制方法的探究.ppt

天马****23

1/10

2/10
3/10

4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

四旋翼飞行器的控制方法的探究.ppt
1.总结回顾项目参考文献鸣谢:《四旋翼无人飞行器控制系统设计及控制方法研究》——内蒙古科技大学《微软XBOX手柄遥控乐高机械手车的MSRDS编程详解》——宜昌城老张的博客《键盘代码表》——百度文库摘要四旋翼飞行器的控制方法的探究正文背景与意义:研究方法和过程示例程序(图)3.学习示例程序结构上的每个部分,在明白示例程序之后开始了使用该程序控制四旋翼4.对姿态传感器进行初步研究,但由于软件硬件问题,这项并没有继续下去5.讨论示例程序操控上和数据交互上的不足,并对程序进行了小幅度的修改。(增加了Emegenc

旋翼桨叶、旋翼、飞行器以及方法.pdf
本发明一种旋翼桨叶、旋翼、飞行器以及方法,包括主体骨架、尾部方向控制装置、着陆机构、源动力机构以及集成遥控装置,所述的源动力机构中包括有将所述的动力源的动力同时传到前螺旋桨和后螺旋桨的齿轮减速离合机构;本发明实现了一个动力源同时带动双桨或多桨转动,大大降低了旋翼桨叶、旋翼、飞行器以及方法自身的重量,从而提高了旋翼桨叶、旋翼、飞行器以及方法的机动性能和续航力。
旋翼桨叶、旋翼、飞行器以及方法.pdf
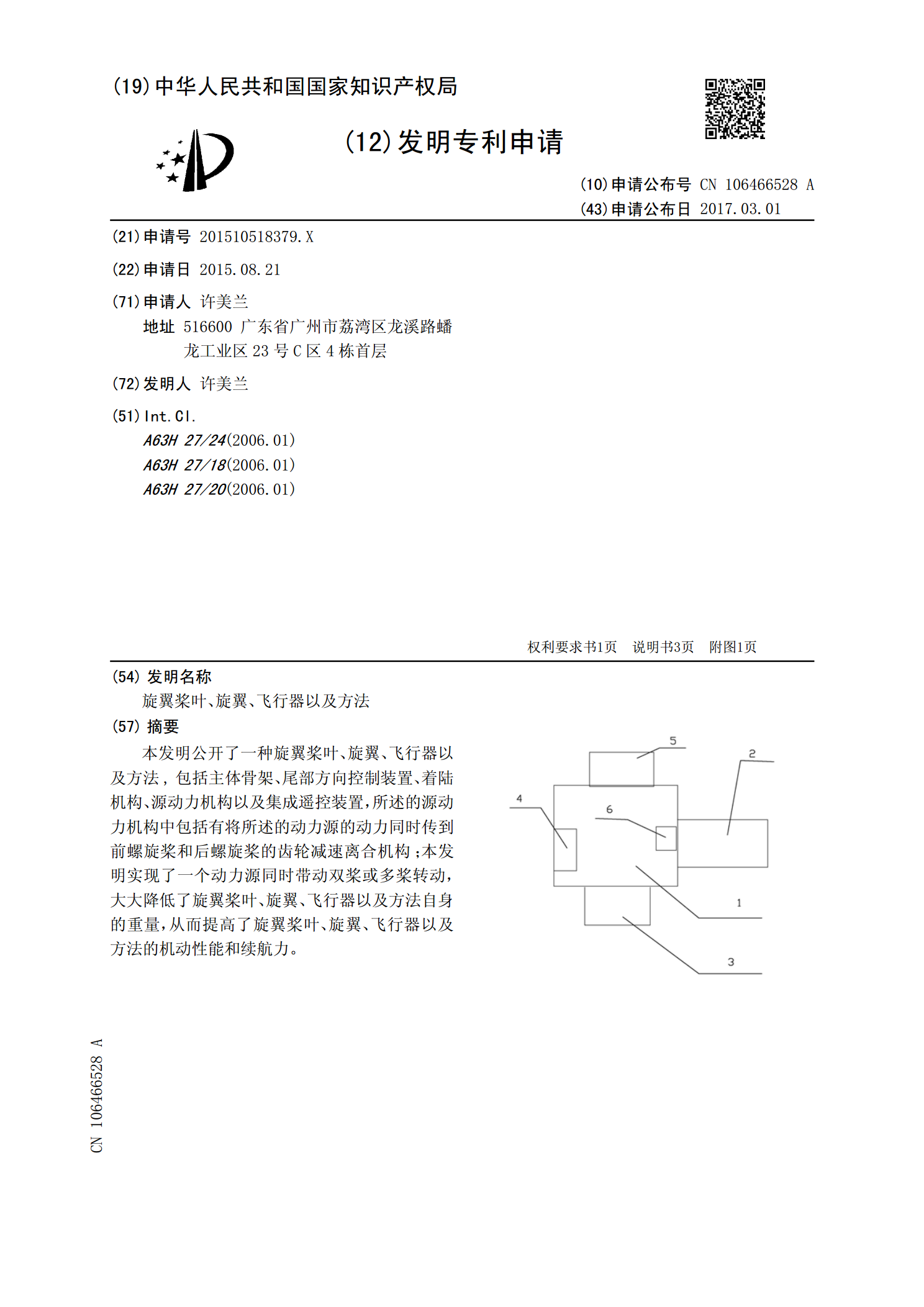
本发明公开了一种旋翼桨叶、旋翼、飞行器以及方法,包括主体骨架、尾部方向控制装置、着陆机构、源动力机构以及集成遥控装置,所述的源动力机构中包括有将所述的动力源的动力同时传到前螺旋桨和后螺旋桨的齿轮减速离合机构;本发明实现了一个动力源同时带动双桨或多桨转动,大大降低了旋翼桨叶、旋翼、飞行器以及方法自身的重量,从而提高了旋翼桨叶、旋翼、飞行器以及方法的机动性能和续航力。
旋翼桨叶、旋翼、飞行器以及方法.pdf
本发明公开一种旋翼桨叶、旋翼、飞行器以及方法,包括主体骨架、尾部方向控制装置、着陆机构、源动力机构以及集成遥控装置,所述的源动力机构中包括有将所述的动力源的动力同时传到前螺旋桨和后螺旋桨的齿轮减速离合机构;本发明实现了一个动力源同时带动双桨或多桨转动,大大降低了旋翼桨叶、旋翼、飞行器以及方法自身的重量,从而提高了旋翼桨叶、旋翼、飞行器以及方法的机动性能和续航力。

四旋翼飞行器.pdf
本发明公开了四旋翼飞行器,其设有机身,该机身的左右两侧均设有旋翼架,每个旋翼架均通过设置用于实现旋翼架围绕机身旋转折叠的铰接机构与机身连接在一起,且每个旋翼架与机身之间均设置用于锁定旋翼架处于展开状态的锁合机构。本发明通过铰接机构可以实现折叠功能,通过锁合机构可以实现锁定展开状态的功能,折叠与展开转变的操作过程方便,缩小了飞行器的占用空间,保护了飞行器,避免碰撞损坏的情况发生,方便携带与运输,结构简单,性能稳定。