
一种基于点特征和轮廓特征融合的图像匹配定位方法.pdf

An****70


1/10

2/10

3/10
4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于点特征和轮廓特征融合的图像匹配定位方法.pdf
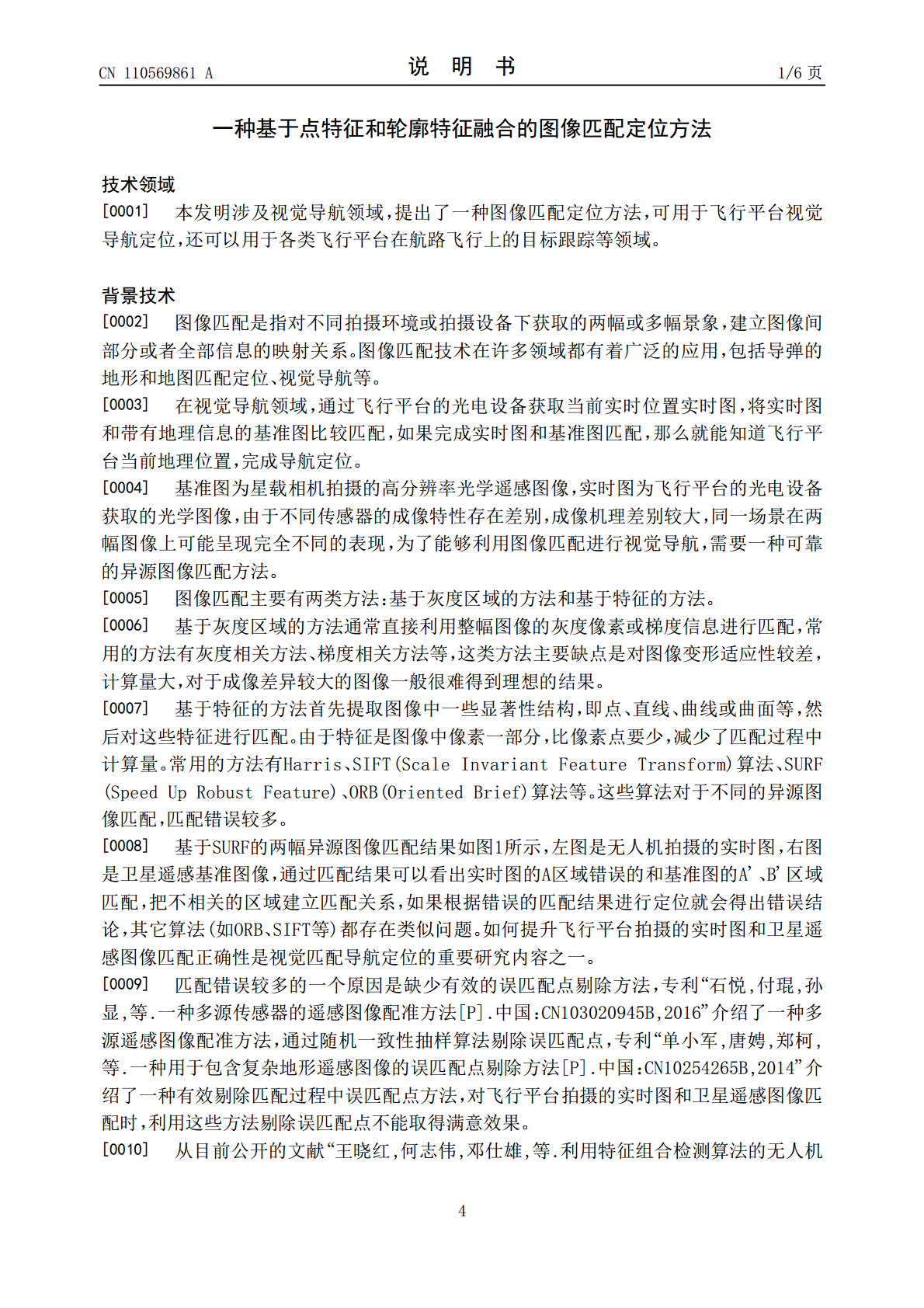
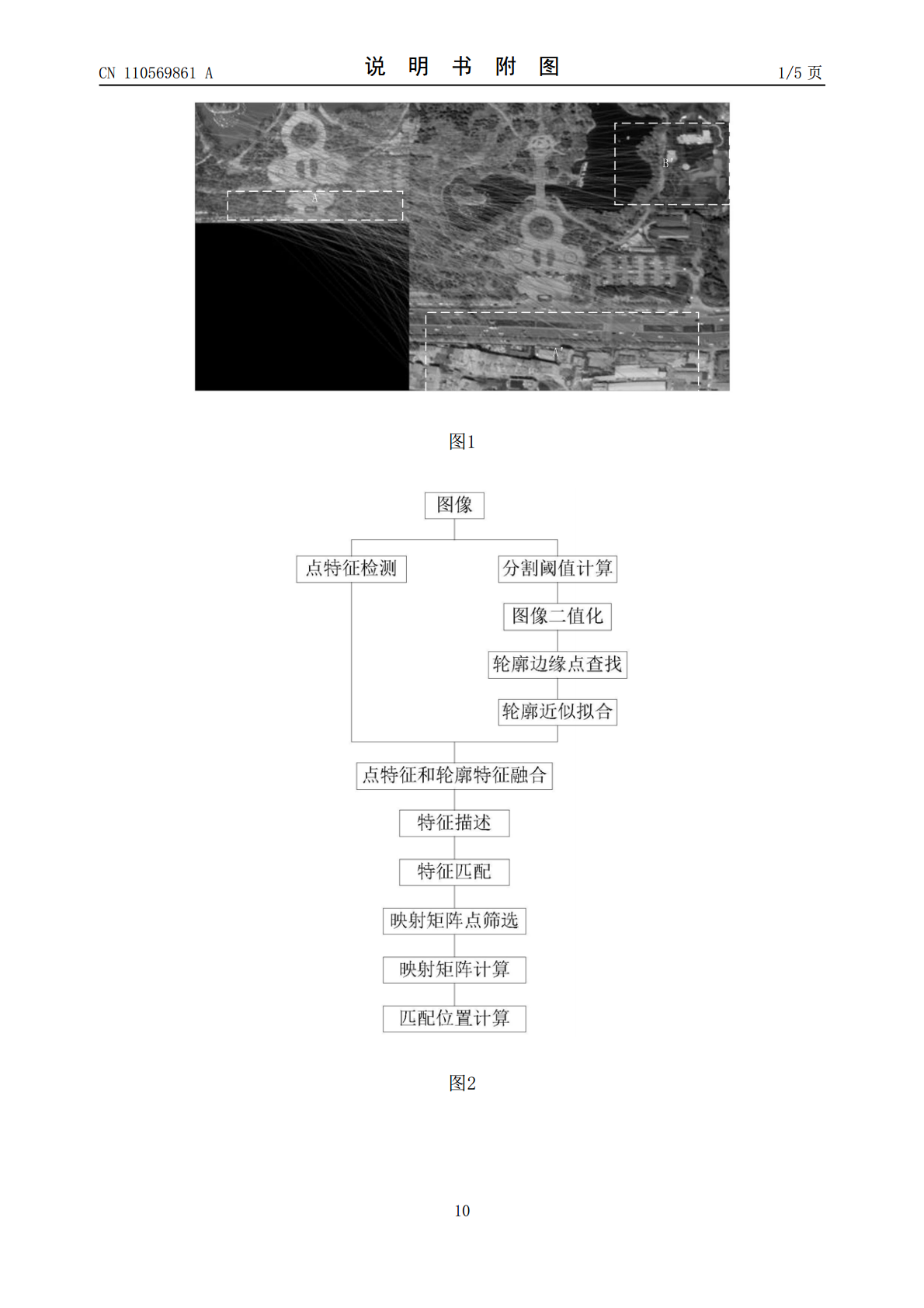
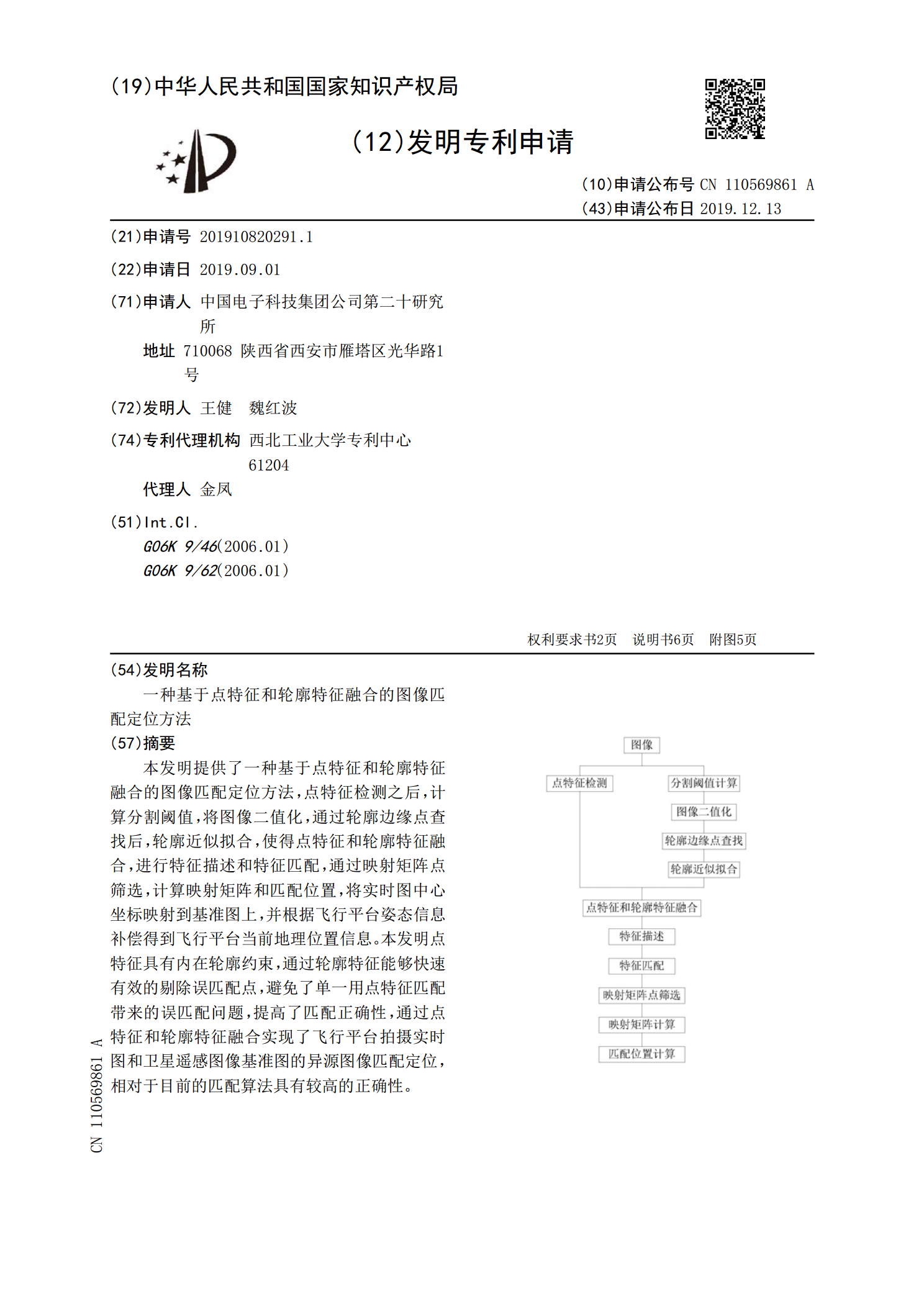
本发明提供了一种基于点特征和轮廓特征融合的图像匹配定位方法,点特征检测之后,计算分割阈值,将图像二值化,通过轮廓边缘点查找后,轮廓近似拟合,使得点特征和轮廓特征融合,进行特征描述和特征匹配,通过映射矩阵点筛选,计算映射矩阵和匹配位置,将实时图中心坐标映射到基准图上,并根据飞行平台姿态信息补偿得到飞行平台当前地理位置信息。本发明点特征具有内在轮廓约束,通过轮廓特征能够快速有效的剔除误匹配点,避免了单一用点特征匹配带来的误匹配问题,提高了匹配正确性,通过点特征和轮廓特征融合实现了飞行平台拍摄实时图和卫星遥感图

基于距离融合的图像特征点匹配方法.docx
基于距离融合的图像特征点匹配方法基于距离融合的图像特征点匹配方法摘要:图像特征点匹配是计算机视觉中的一个关键问题,广泛应用于图像拼接、三维重建和目标跟踪等领域。然而,由于图像中存在噪声和遮挡等干扰因素,传统的特征点匹配方法往往存在匹配错误和误匹配的问题。为了解决这一问题,本文提出了一种基于距离融合的图像特征点匹配方法,通过融合多种距离度量方法,提高特征点匹配的准确性和鲁棒性。关键词:图像特征点匹配;距离融合;匹配准确性;鲁棒性1.引言图像特征点匹配是计算机视觉中的一个基础问题,它主要用于在不同视图中寻找相
基于轮廓检测和特征匹配的图像配准方法.pdf
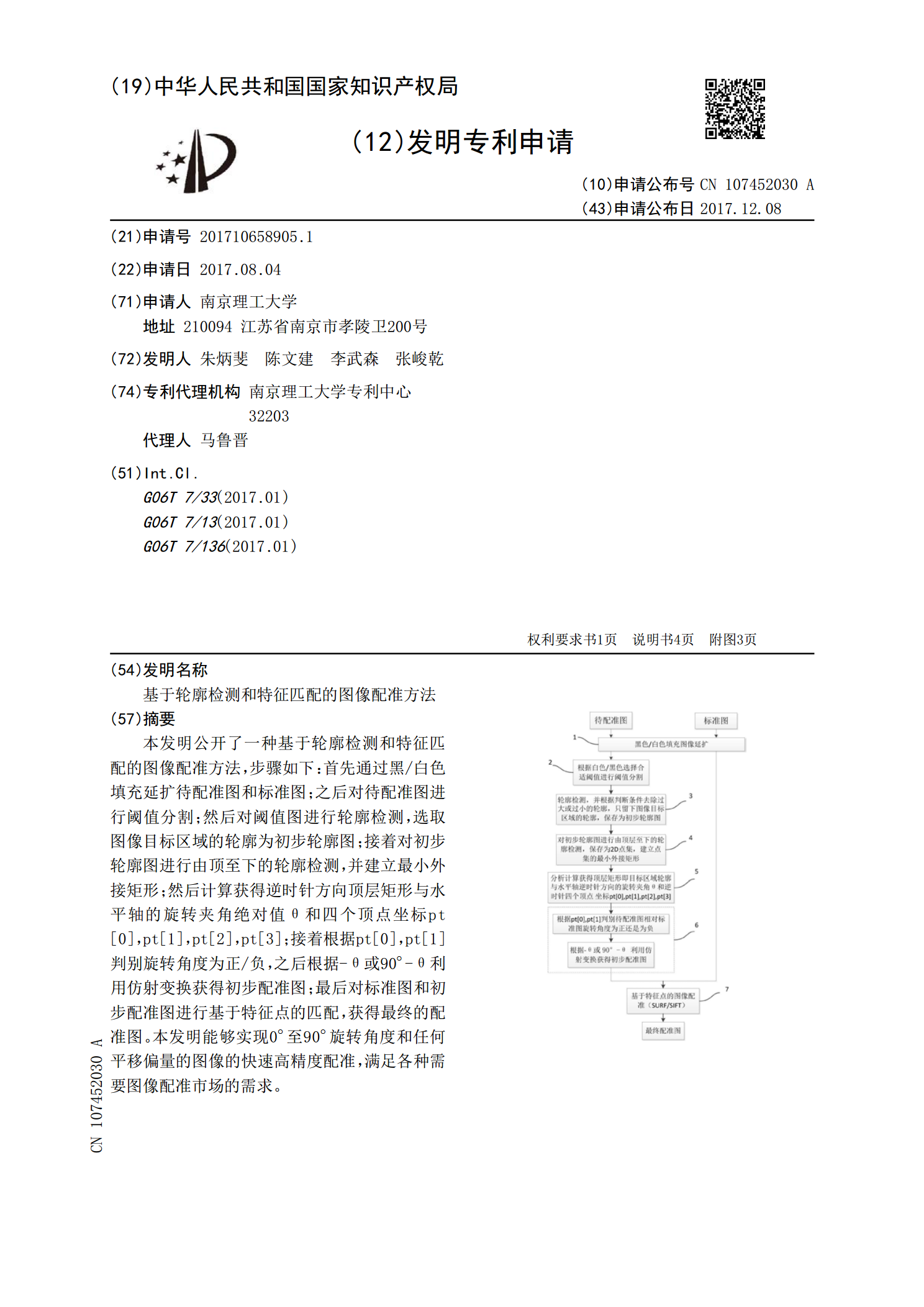
本发明公开了一种基于轮廓检测和特征匹配的图像配准方法,步骤如下:首先通过黑/白色填充延扩待配准图和标准图;之后对待配准图进行阈值分割;然后对阈值图进行轮廓检测,选取图像目标区域的轮廓为初步轮廓图;接着对初步轮廓图进行由顶至下的轮廓检测,并建立最小外接矩形;然后计算获得逆时针方向顶层矩形与水平轴的旋转夹角绝对值θ和四个顶点坐标pt[0],pt[1],pt[2],pt[3];接着根据pt[0],pt[1]判别旋转角度为正/负,之后根据‑θ或90°‑θ利用仿射变换获得初步配准图;最后对标准图和初步配准图进行基于

基于双目图像多特征点融合匹配物体识别与定位研究.docx
基于双目图像多特征点融合匹配物体识别与定位研究基于双目图像多特征点融合匹配物体识别与定位研究摘要:随着计算机视觉的快速发展和人们对智能系统需求的增加,物体识别与定位的研究变得越来越重要。双目图像可以提供更多的深度信息和立体视觉感知,可以在一定程度上提高物体识别和定位的准确性。本文基于双目图像,通过多特征点融合匹配的方法,研究物体识别与定位的算法和技术。实验结果表明,该方法在物体识别与定位方面取得了较好的效果,有较大的应用潜力。关键词:双目图像、物体识别与定位、特征点融合匹配1.引言物体识别与定位是计算机视
一种基于融合手工特征与深度特征的图像匹配方法.pdf
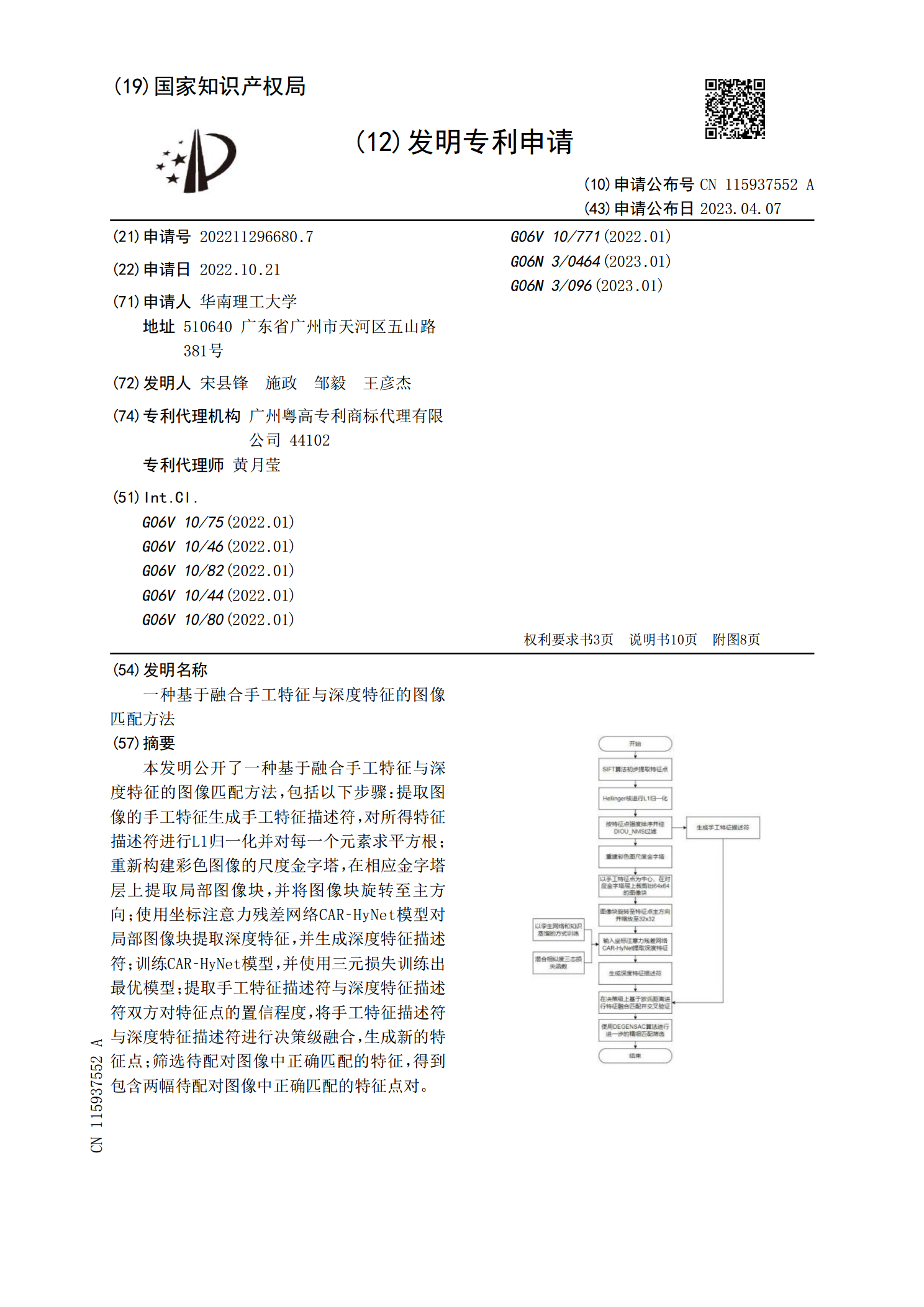
本发明公开了一种基于融合手工特征与深度特征的图像匹配方法,包括以下步骤:提取图像的手工特征生成手工特征描述符,对所得特征描述符进行L1归一化并对每一个元素求平方根;重新构建彩色图像的尺度金字塔,在相应金字塔层上提取局部图像块,并将图像块旋转至主方向;使用坐标注意力残差网络CAR‑HyNet模型对局部图像块提取深度特征,并生成深度特征描述符;训练CAR‑HyNet模型,并使用三元损失训练出最优模型;提取手工特征描述符与深度特征描述符双方对特征点的置信程度,将手工特征描述符与深度特征描述符进行决策级融合,生成