
高性能超声电机驱动及控制电路的研制.docx

lj****88


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

高性能超声电机驱动及控制电路的研制.docx
高性能超声电机驱动及控制电路的研制摘要:介绍了一种高性能的超声电机驱动及控制电路。该电路使用直接数字频率全成器(DDS)作为信号源,通过高压运放将信号放大到峰-峰值为250V,用于驱动超声电机;借助温度传感器采集电机温度变化,利用计算机实时监控超声电机的运行。关键词:超声电机直接数字频率合成器(DD)温度传感器高压运放超声电机是一种基于压电陶瓷逆压电效应的新型电机。与一般电磁电机相比,超声电机能直接输出低转速大力矩,且瞬态响应快(可达ms量级)、定位精度高(可达nm量级),非常适合取代传统的伺服电机及步进

高性能超声电机驱动及控制电路的研制.docx
高性能超声电机驱动及控制电路的研制高性能超声电机驱动及控制电路的研制摘要:介绍了一种高性能的超声电机驱动及控制电路。该电路使用直接数字频率全成器(DDS)作为信号源,通过高压运放将信号放大到峰-峰值为250V,用于驱动超声电机;借助温度传感器采集电机温度变化,利用计算机实时监控超声电机的运行。关键词:超声电机直接数字频率合成器(DD)温度传感器高压运放超声电机是一种基于压电陶瓷逆压电效应的新型电机。与一般电磁电机相比,超声电机能直接输出低转速大力矩,且瞬态响应快(可达ms量级)、定位精度高(可达nm量级)
一种电机驱动控制电路.pdf
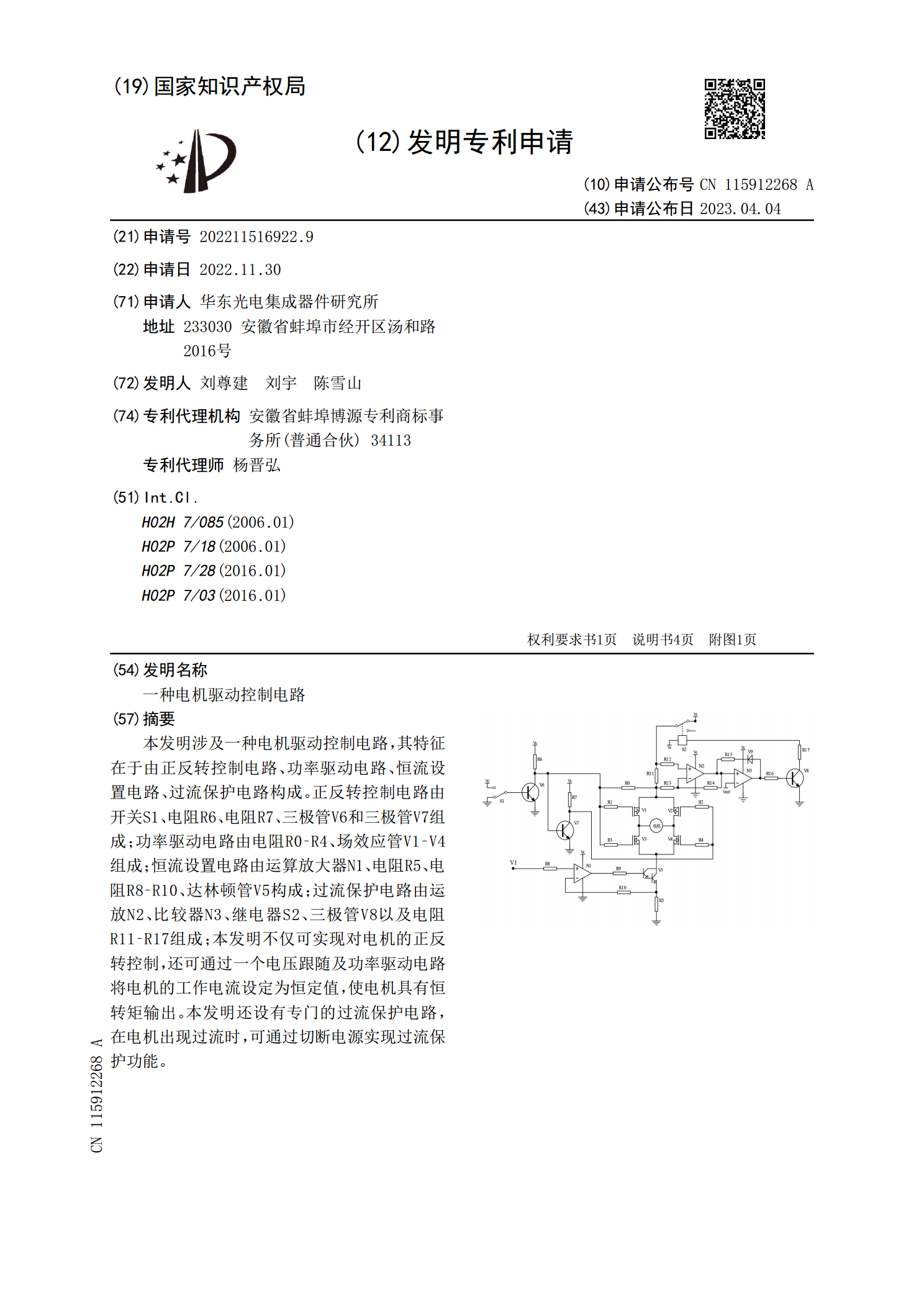
本发明涉及一种电机驱动控制电路,其特征在于由正反转控制电路、功率驱动电路、恒流设置电路、过流保护电路构成。正反转控制电路由开关S1、电阻R6、电阻R7、三极管V6和三极管V7组成;功率驱动电路由电阻R0‑R4、场效应管V1‑V4组成;恒流设置电路由运算放大器N1、电阻R5、电阻R8‑R10、达林顿管V5构成;过流保护电路由运放N2、比较器N3、继电器S2、三极管V8以及电阻R11‑R17组成;本发明不仅可实现对电机的正反转控制,还可通过一个电压跟随及功率驱动电路将电机的工作电流设定为恒定值,使电机具有恒转

基于频率跟踪的超声驱动电源研制.docx
基于频率跟踪的超声驱动电源研制基于频率跟踪的超声驱动电源研制摘要随着超声技术在医学、工业、环境等领域的广泛应用,超声驱动电源的研制变得日益重要。传统的超声驱动电源存在一些问题,如输出频率稳定性差、功率调节范围窄等。为了解决这些问题,本文提出了一种基于频率跟踪的超声驱动电源的设计方案。该电源采用了频率锁相环技术,能够实现高精度的频率跟踪和稳定的输出。实验证明,该电源具有良好的稳定性和调节范围,可以满足超声驱动的需求。关键词:超声驱动电源、频率跟踪、频率锁相环、稳定性、调节范围1.引言超声技术是一种通过声波传
电机控制电路、电机驱动控制装置、电机单元及电机控制方法.pdf
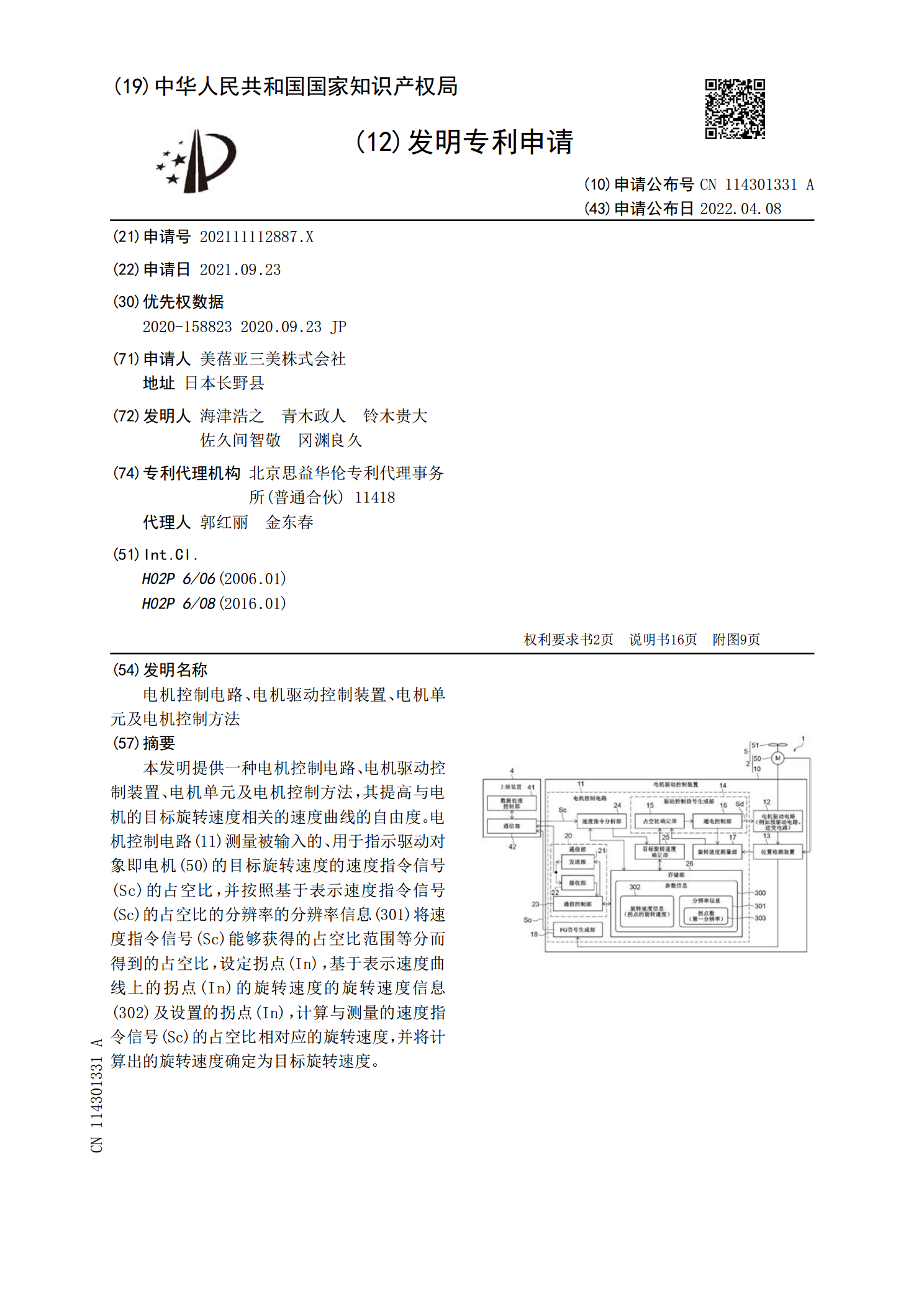
本发明提供一种电机控制电路、电机驱动控制装置、电机单元及电机控制方法,其提高与电机的目标旋转速度相关的速度曲线的自由度。电机控制电路(11)测量被输入的、用于指示驱动对象即电机(50)的目标旋转速度的速度指令信号(Sc)的占空比,并按照基于表示速度指令信号(Sc)的占空比的分辨率的分辨率信息(301)将速度指令信号(Sc)能够获得的占空比范围等分而得到的占空比,设定拐点(In),基于表示速度曲线上的拐点(In)的旋转速度的旋转速度信息(302)及设置的拐点(In),计算与测量的速度指令信号(Sc)的占空比