
电机控制电路、电机驱动控制装置、电机单元及电机控制方法.pdf

葫芦****io

1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
电机控制电路、电机驱动控制装置、电机单元及电机控制方法.pdf
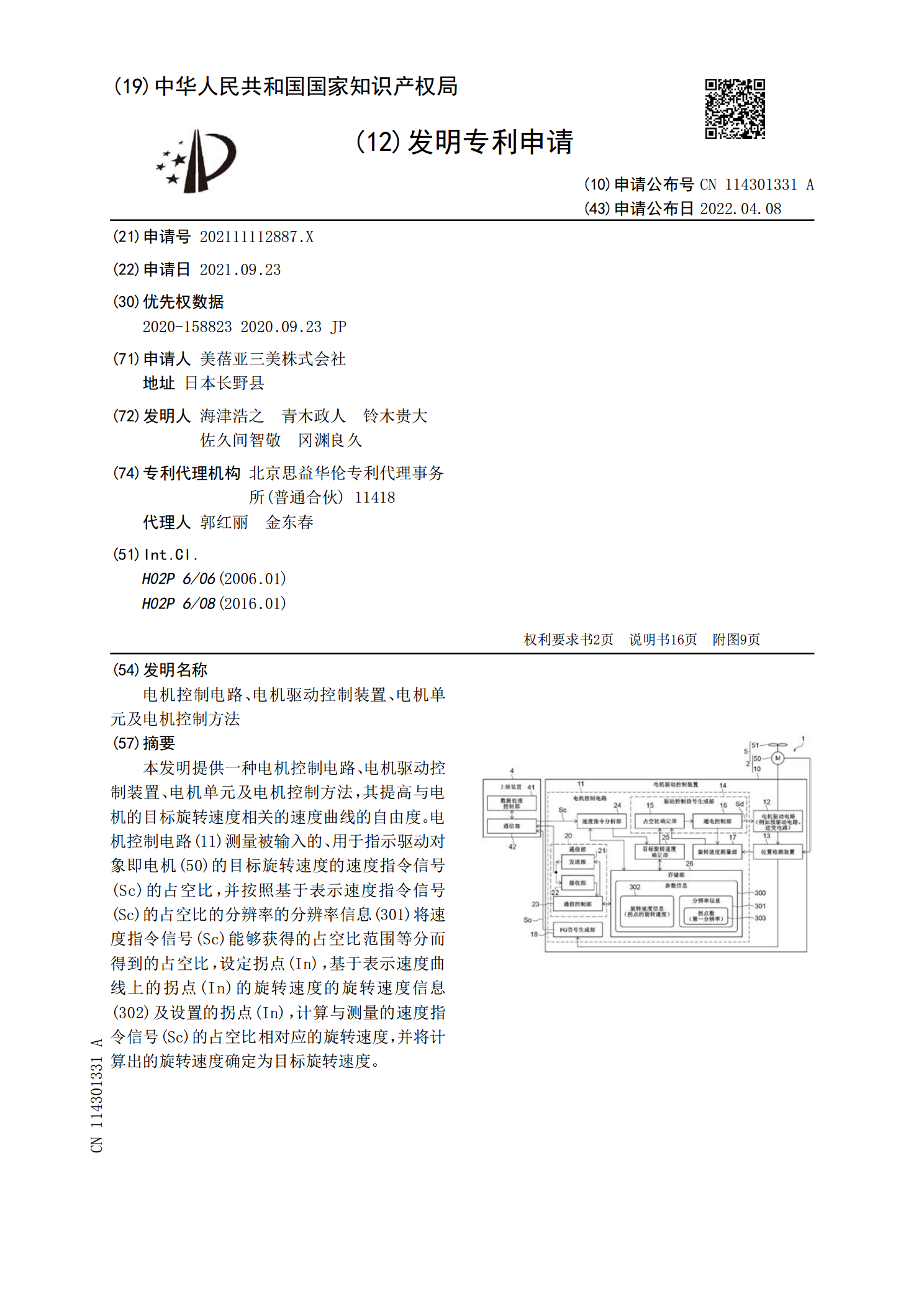
本发明提供一种电机控制电路、电机驱动控制装置、电机单元及电机控制方法,其提高与电机的目标旋转速度相关的速度曲线的自由度。电机控制电路(11)测量被输入的、用于指示驱动对象即电机(50)的目标旋转速度的速度指令信号(Sc)的占空比,并按照基于表示速度指令信号(Sc)的占空比的分辨率的分辨率信息(301)将速度指令信号(Sc)能够获得的占空比范围等分而得到的占空比,设定拐点(In),基于表示速度曲线上的拐点(In)的旋转速度的旋转速度信息(302)及设置的拐点(In),计算与测量的速度指令信号(Sc)的占空比
电机驱动控制装置、电机单元以及电机驱动控制方法.pdf
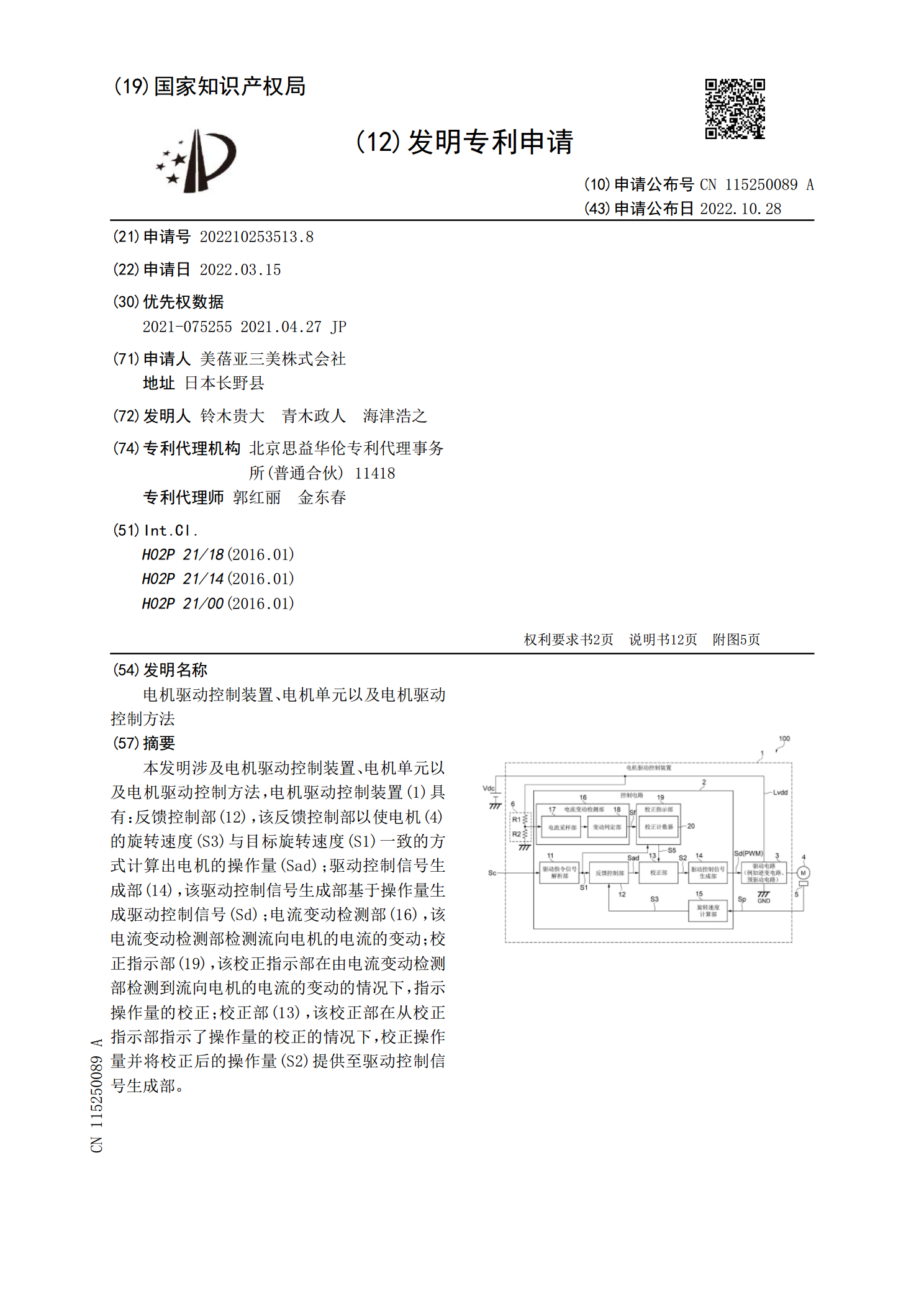
本发明涉及电机驱动控制装置、电机单元以及电机驱动控制方法,电机驱动控制装置(1)具有:反馈控制部(12),该反馈控制部以使电机(4)的旋转速度(S3)与目标旋转速度(S1)一致的方式计算出电机的操作量(Sad);驱动控制信号生成部(14),该驱动控制信号生成部基于操作量生成驱动控制信号(Sd);电流变动检测部(16),该电流变动检测部检测流向电机的电流的变动;校正指示部(19),该校正指示部在由电流变动检测部检测到流向电机的电流的变动的情况下,指示操作量的校正;校正部(13),该校正部在从校正指示部指示了
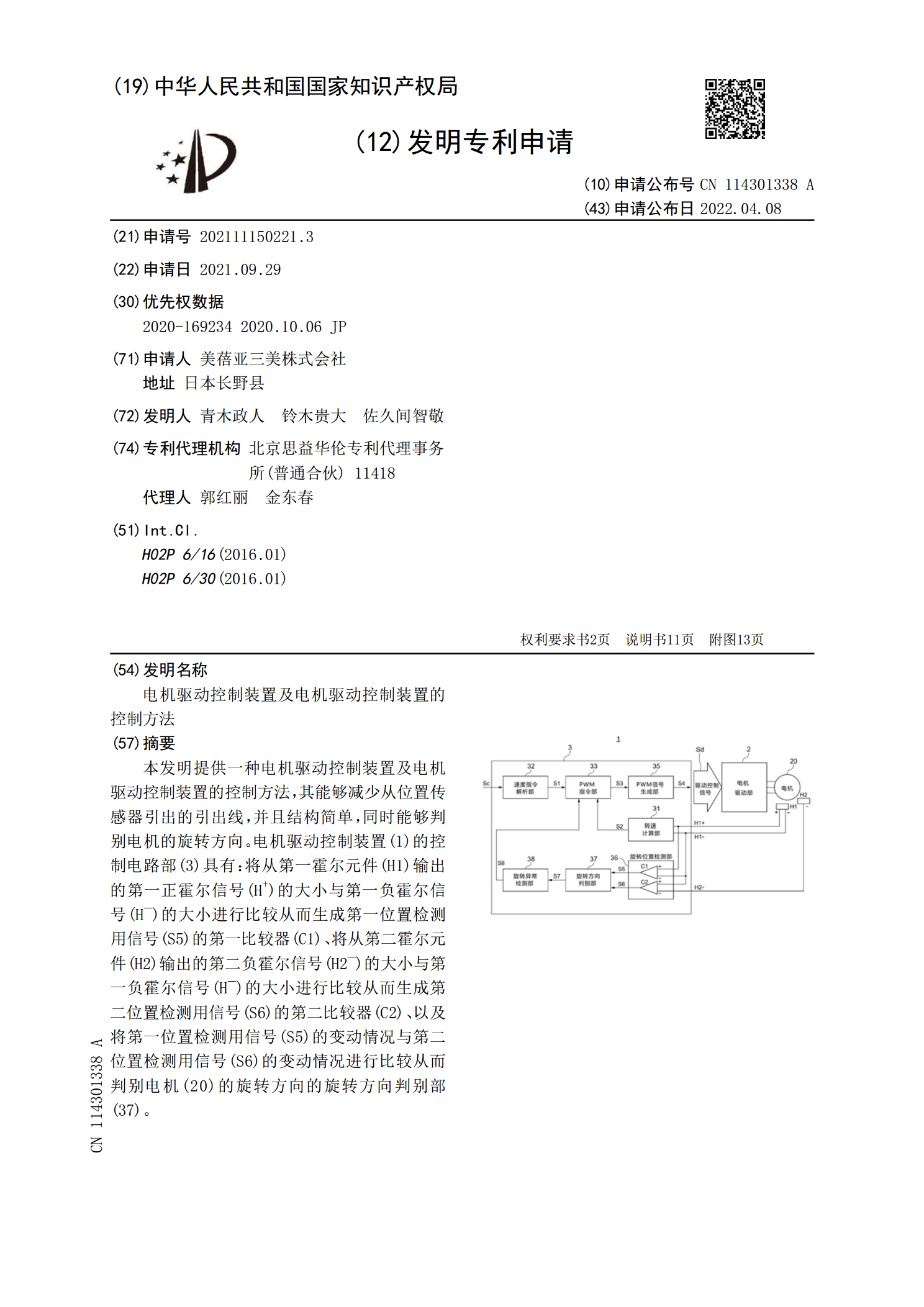
电机驱动控制装置及电机驱动控制装置的控制方法.pdf
本发明提供一种电机驱动控制装置及电机驱动控制装置的控制方法,其能够减少从位置传感器引出的引出线,并且结构简单,同时能够判别电机的旋转方向。电机驱动控制装置(1)的控制电路部(3)具有:将从第一霍尔元件(H1)输出的第一正霍尔信号(H<base:Sup>+</base:Sup>)的大小与第一负霍尔信号(H<base:Sup>-</base:Sup>)的大小进行比较从而生成第一位置检测用信号(S5)的第一比较器(C1)、将从第二霍尔元件(H2)输出的第二负霍尔信号(H2<base:Sup>-</base:Su
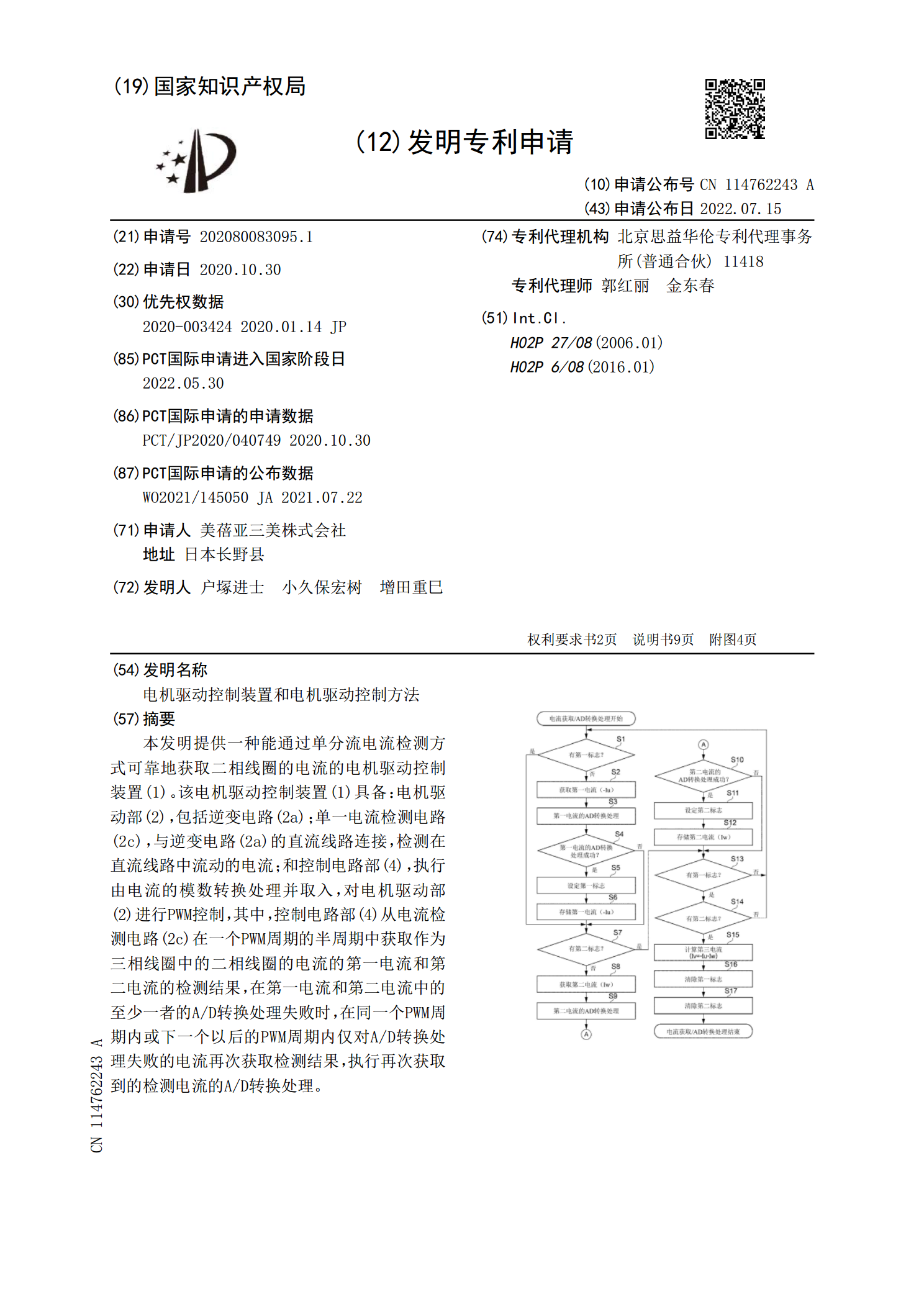
电机驱动控制装置和电机驱动控制方法.pdf
本发明提供一种能通过单分流电流检测方式可靠地获取二相线圈的电流的电机驱动控制装置(1)。该电机驱动控制装置(1)具备:电机驱动部(2),包括逆变电路(2a);单一电流检测电路(2c),与逆变电路(2a)的直流线路连接,检测在直流线路中流动的电流;和控制电路部(4),执行由电流的模数转换处理并取入,对电机驱动部(2)进行PWM控制,其中,控制电路部(4)从电流检测电路(2c)在一个PWM周期的半周期中获取作为三相线圈中的二相线圈的电流的第一电流和第二电流的检测结果,在第一电流和第二电流中的至少一者的A/D转
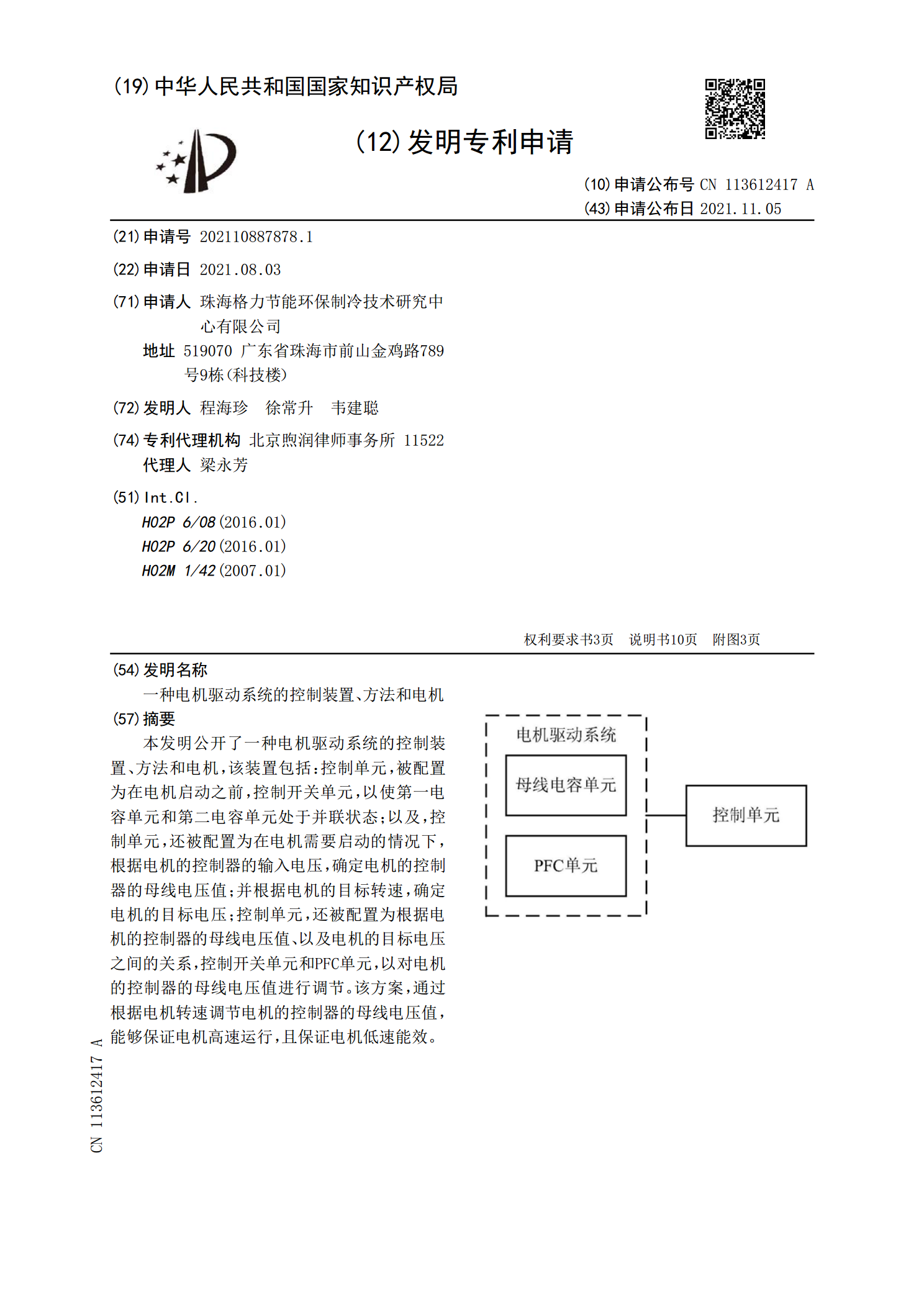
一种电机驱动系统的控制装置、方法和电机.pdf
本发明公开了一种电机驱动系统的控制装置、方法和电机,该装置包括:控制单元,被配置为在电机启动之前,控制开关单元,以使第一电容单元和第二电容单元处于并联状态;以及,控制单元,还被配置为在电机需要启动的情况下,根据电机的控制器的输入电压,确定电机的控制器的母线电压值;并根据电机的目标转速,确定电机的目标电压;控制单元,还被配置为根据电机的控制器的母线电压值、以及电机的目标电压之间的关系,控制开关单元和PFC单元,以对电机的控制器的母线电压值进行调节。该方案,通过根据电机转速调节电机的控制器的母线电压值,能够保