
一种行走转向结构及基于该结构的管道机器人.pdf

建英****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种行走转向结构及基于该结构的管道机器人.pdf
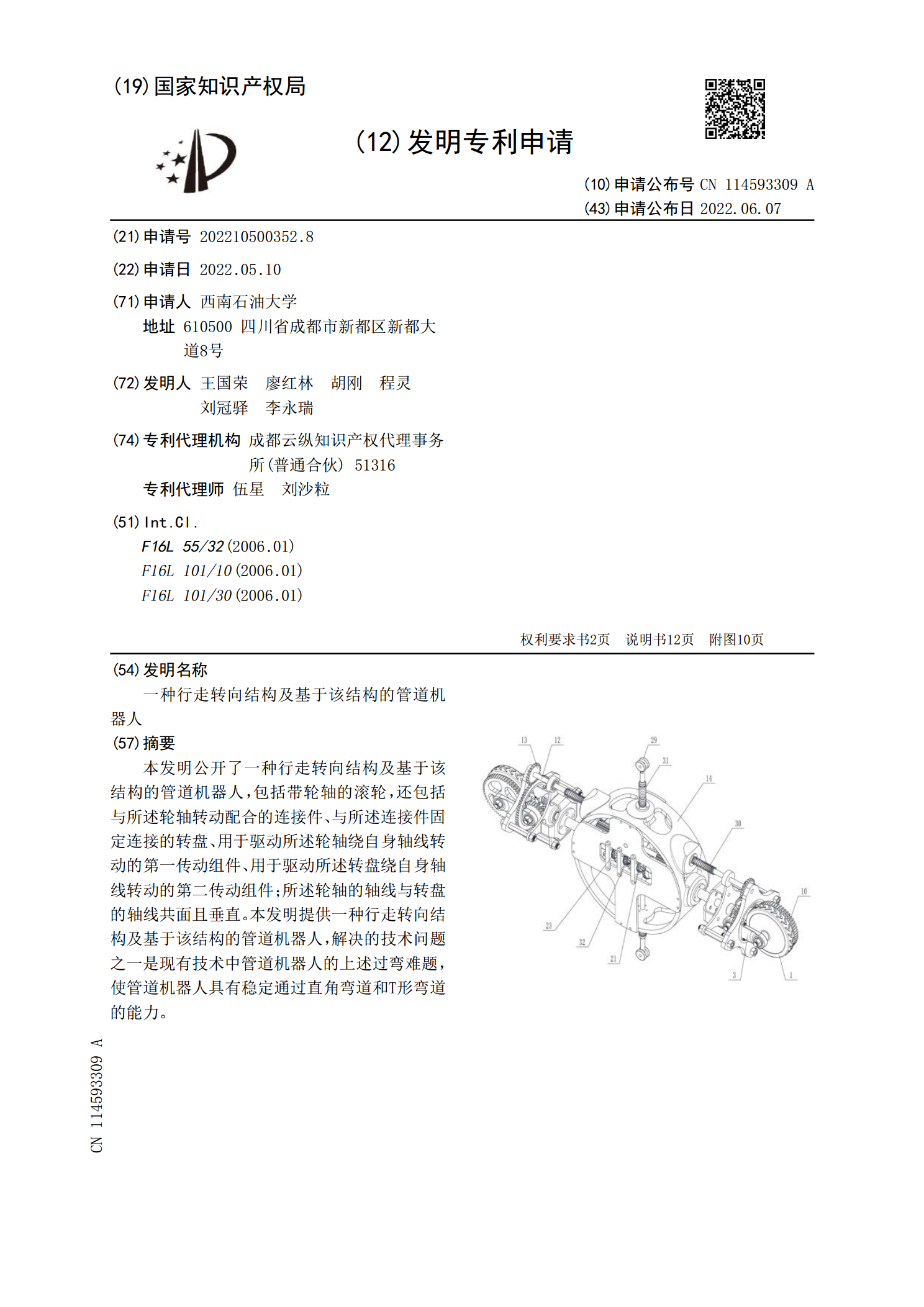
本发明公开了一种行走转向结构及基于该结构的管道机器人,包括带轮轴的滚轮,还包括与所述轮轴转动配合的连接件、与所述连接件固定连接的转盘、用于驱动所述轮轴绕自身轴线转动的第一传动组件、用于驱动所述转盘绕自身轴线转动的第二传动组件;所述轮轴的轴线与转盘的轴线共面且垂直。本发明提供一种行走转向结构及基于该结构的管道机器人,解决的技术问题之一是现有技术中管道机器人的上述过弯难题,使管道机器人具有稳定通过直角弯道和T形弯道的能力。

一种辅助稳定机构以及包括该结构的机器人行走机构.pdf
本发明公开了一种应用于机器人在轨运行的辅助稳定机构,包括一个安装架、辅助轮支架、辅助轮,所述的辅助轮包括两个,两个所述的辅助轮分别各自与一个辅助轮支架相连;两个所述的辅助轮支架各自通过固定轴与所述安装架相连;在所述的安装架上设有一个转动轴,所述的转动轴上设有一个转动件,转动件的两端分别通过第一活动轴与第一连杆和第二连杆转动连接,所述的第一连杆和第二连杆分别通过第二活动轴与两个辅助轮支架转动连接;且两个所述的辅助轮支架各自与一个弹性调节装置相连。

机器人行走结构.pdf
机器人行走结构的类型及特点机器人行走结构的类型及特点一、移动机器人行走机构概述机器人行走机构按照其运动轨迹可分为固定式轨迹和无固定式轨迹两种。固定式轨迹主要用于工业机器人,它是对人类手臂动作和功能的模拟和扩展;无固定轨迹就是指具有移动功能的移动机器人,它是对人类行走功能的模拟和扩展。移动机器人的行走结构形式主要有:车轮式移动结构;履带式移动结构;步行式移动结构。此外,还有步进式移动结构、蠕动式移动结构、混合式移动结构和蛇行式移动结构等,适合于各种特别的场合。从移动机器人所处环境看,可以分为结构环境和非结构

机器人行走结构.pdf
机器人行走结构--机器人行走结构的类型及特点机器人行走结构的类型及特点一、移动机器人行走机构概述机器人行走机构按照其运动轨迹可分为固定式轨迹和无固定式轨迹两种。固定式轨迹主要用于工业机器人,它是对人类手臂动作和功能的模拟和扩展;无固定轨迹就是指具有移动功能的移动机器人,它是对人类行走功能的模拟和扩展。移动机器人的行走结构形式主要有:车轮式移动结构;履带式移动结构;步行式移动结构。此外,还有步进式移动结构、蠕动式移动结构、混合式移动结构和蛇行式移动结构等,适合于各种特别的场合。从移动机器人所处环境看,可以分
一种仿真机器人的行走结构.pdf
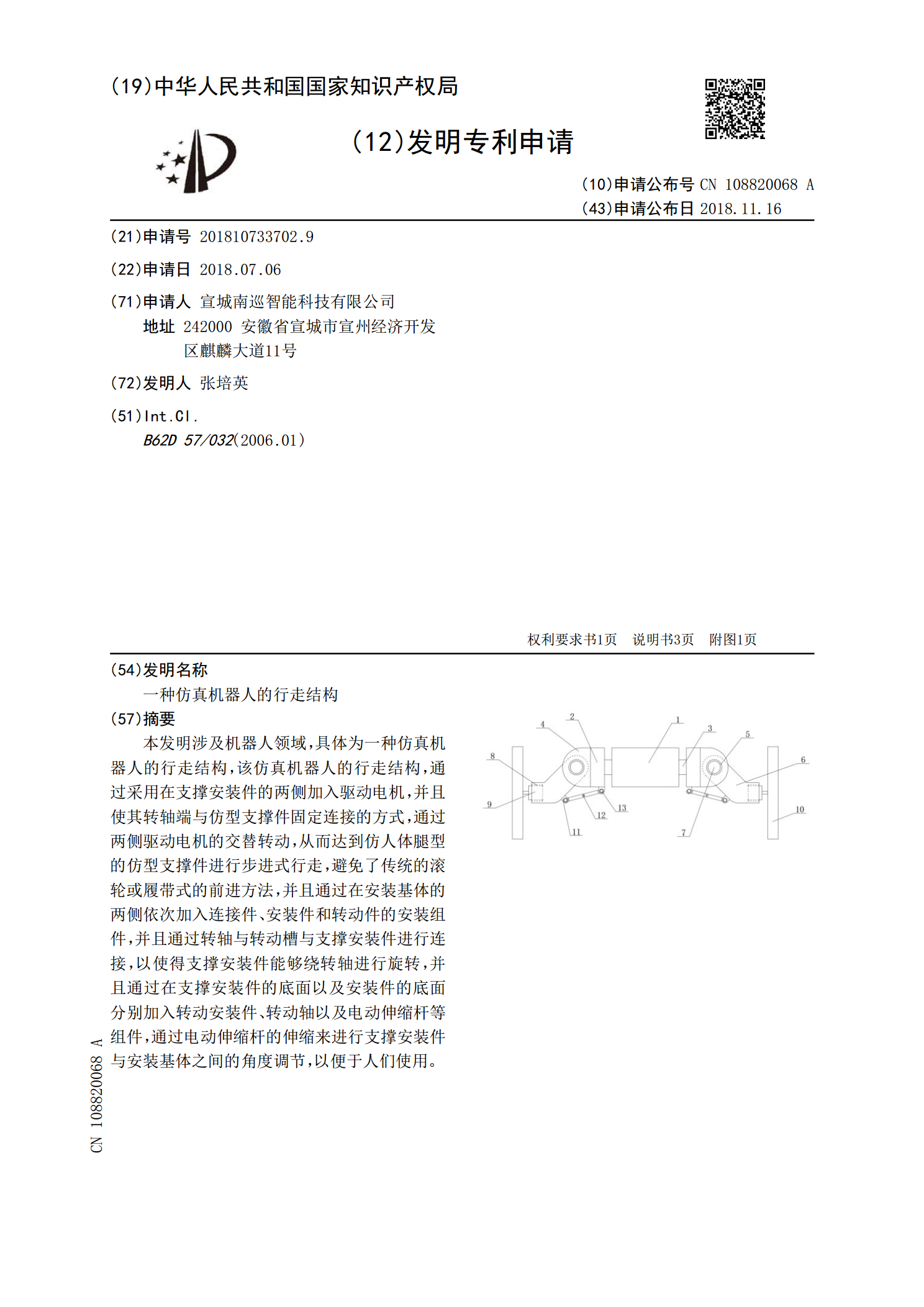
本发明涉及机器人领域,具体为一种仿真机器人的行走结构,该仿真机器人的行走结构,通过采用在支撑安装件的两侧加入驱动电机,并且使其转轴端与仿型支撑件固定连接的方式,通过两侧驱动电机的交替转动,从而达到仿人体腿型的仿型支撑件进行步进式行走,避免了传统的滚轮或履带式的前进方法,并且通过在安装基体的两侧依次加入连接件、安装件和转动件的安装组件,并且通过转轴与转动槽与支撑安装件进行连接,以使得支撑安装件能够绕转轴进行旋转,并且通过在支撑安装件的底面以及安装件的底面分别加入转动安装件、转动轴以及电动伸缩杆等组件,通过电