
基于车辆状态估计的自动驾驶网络攻击检测系统及方法.pdf

是你****元呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于车辆状态估计的自动驾驶网络攻击检测系统及方法.pdf
本发明公开了一种基于车辆状态估计的自动驾驶网络攻击检测系统及方法,包括:车载加速度传感器、车速传感器、前轮转角传感器、激光雷达传感器、GPS传感器、惯性导航传感器、网络攻击检测模块和网络攻击容错模块;本发明可以面对传感器故障以及网络攻击安全问题进行警告和容错,并且可以检测出具体受攻击的传感器,大大提高了智能车辆的网络安全性。
用于自动驾驶车辆控制的系统延迟估计方法.pdf
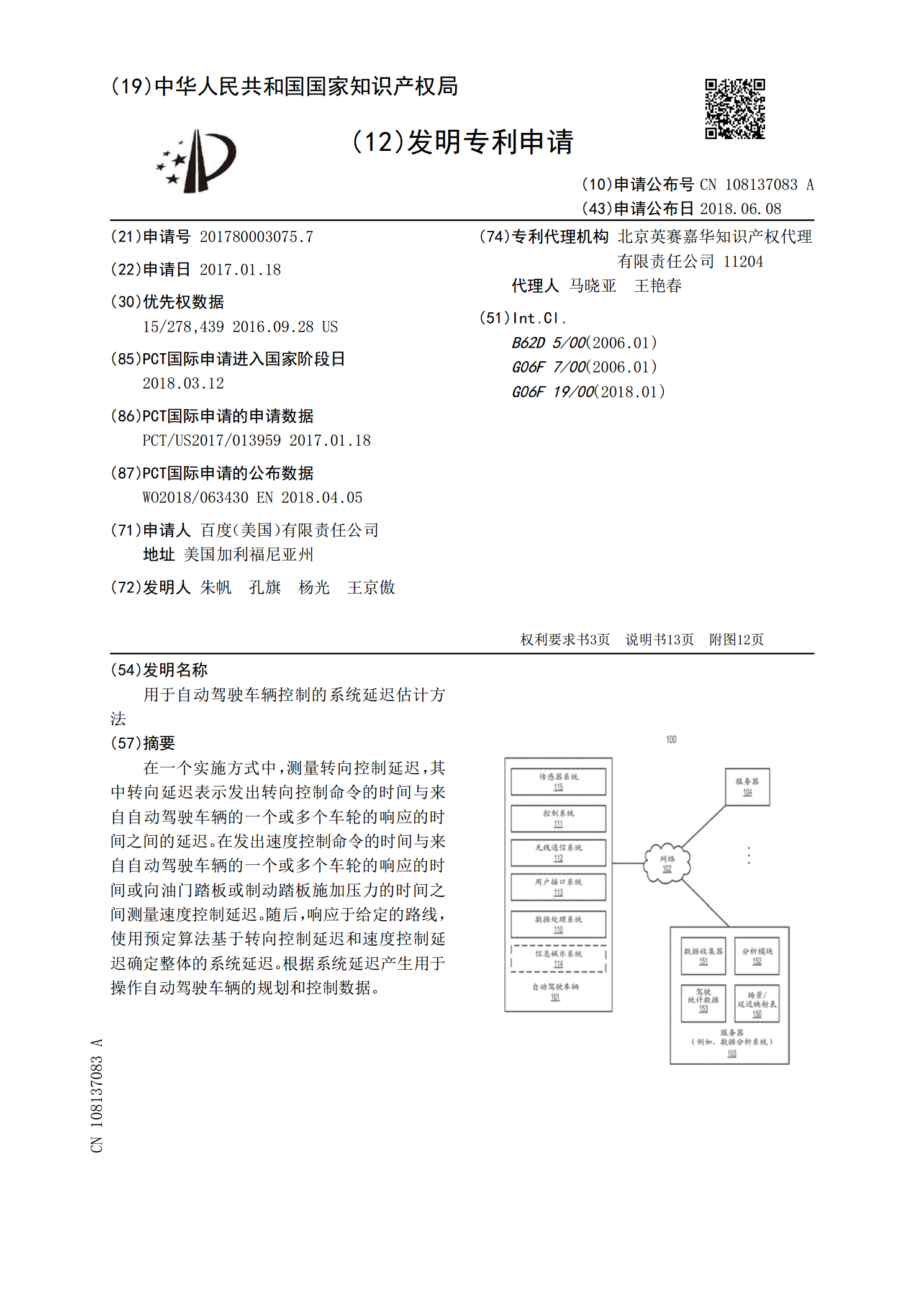
在一个实施方式中,测量转向控制延迟,其中转向延迟表示发出转向控制命令的时间与来自自动驾驶车辆的一个或多个车轮的响应的时间之间的延迟。在发出速度控制命令的时间与来自自动驾驶车辆的一个或多个车轮的响应的时间或向油门踏板或制动踏板施加压力的时间之间测量速度控制延迟。随后,响应于给定的路线,使用预定算法基于转向控制延迟和速度控制延迟确定整体的系统延迟。根据系统延迟产生用于操作自动驾驶车辆的规划和控制数据。

用于估计车辆轮胎的气压状态的系统和方法.pdf
一种用于估计车辆轮胎的气压状态的系统和方法,其中,所述系统包括一个或更多个传感器单元以及控制器,每个传感器单元包括光学传感器,例如照相机,以获取对应车辆的至少一个车轮的至少一幅图像,所述控制器包括处理器以从所述传感器单元接收所述车辆的各个车轮的图像数据并利用特定的图像分析处理对其进行分析以估计所述车轮轮胎中的一个或更多个轮胎的气压状态。所述处理器还被配置成能够呈现各个对应轮胎的估计气压状态。

基于事件触发的复杂网络系统的状态估计.docx
基于事件触发的复杂网络系统的状态估计复杂网络系统被广泛应用于多种领域,如社交网络、生物网络和交通网络等。网络系统的状态估计是网络控制与优化中的关键问题之一。本文将着重介绍基于事件触发的状态估计方法,该方法可以有效地提高估计准确性并减少计算负荷。一般地,网络系统的状态估计是指利用有限观测数据,对网络系统的未知状态进行推断,如节点状态、边状态和整个网络的拓扑结构等。传统方法采用定常状态方程和连续时间观测,这些方法只能进行平稳状态下的估计,并需要频繁地进行系统重新计算,计算开销过大。近年来,随着事件触发控制的发

路面状态估计方法、车辆控制方法以及路面状态估计装置.pdf
本发明提供一种路面状态估计方法、车辆控制方法以及路面状态估计装置。使用以采用了变节距的普通轮胎图案为基调的路面状态检测用轮胎来高精确度地估计行驶中的路面的状态。由加速度传感器检测路面状态检测用轮胎的轮胎的振动,由旋转次数比分析单元进行旋转次数比分析,由路面状态估计单元将由旋转次数成分提取单元提取出的轮胎的振动的旋转次数成分的大小与预先设定的阈值进行比较,来估计行驶中的路面的状态,其中,该路面状态检测用轮胎具有沿着轮胎圆周方向的块的总数N为10以上的块列,设置有将块列中的沿轮胎圆周方向相邻的块彼此连结的连结