
巡检机器人的行走机构、巡检机器人及巡检系统.pdf

睿达****的的


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

巡检机器人的行走机构、巡检机器人及巡检系统.pdf
本申请涉及机器人技术领域,具体涉及巡检机器人的行走机构、巡检机器人及巡检系统。巡检系统包括巡检机器人和圆形轨道,巡检机器人上设置适于在圆形轨道上行走的行走机构,该行走机构包括基座及安装于基座的第一驱动轮、第二驱动轮和压紧轮,第一驱动轮、第二驱动轮和压紧轮被配置为沿圆形轨道的圆周方向间隔布置以环抱圆形轨道,压紧轮用于配合第一驱动轮和第二驱动轮夹紧圆形轨道。行走机构的第一驱动轮、第二驱动轮和压紧轮配合,类似套在圆形轨道上的圆环,即使圆形轨道的转弯半径较小也不容易干涉受限,因此行走路径可以更为灵活地设置,缓解现
巡检机器人、及巡检系统.pdf
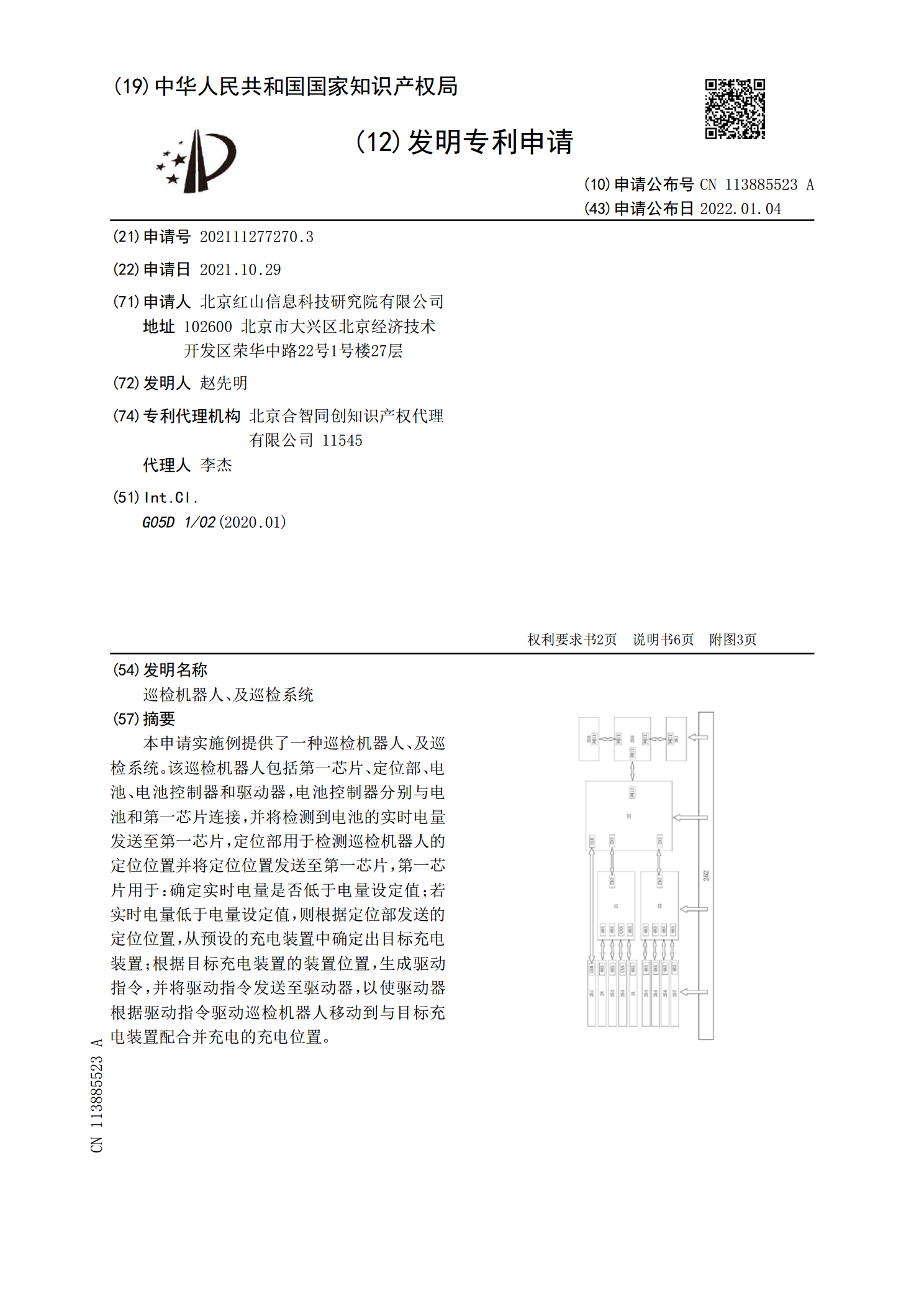
本申请实施例提供了一种巡检机器人、及巡检系统。该巡检机器人包括第一芯片、定位部、电池、电池控制器和驱动器,电池控制器分别与电池和第一芯片连接,并将检测到电池的实时电量发送至第一芯片,定位部用于检测巡检机器人的定位位置并将定位位置发送至第一芯片,第一芯片用于:确定实时电量是否低于电量设定值;若实时电量低于电量设定值,则根据定位部发送的定位位置,从预设的充电装置中确定出目标充电装置;根据目标充电装置的装置位置,生成驱动指令,并将驱动指令发送至驱动器,以使驱动器根据驱动指令驱动巡检机器人移动到与目标充电装置配合

轨道巡检机器人行走机构.pdf
本发明涉及巡检机器人设备的技术领域,提供轨道巡检机器人行走机构,包括具有中空内腔的导轨,内腔中设有主动机构和从动机构,主动机构包括主动固定架、主动轴、主动轮及驱动组件,从动机构包括从动固定架、从动轴及从动轮。由于主动机构及从动机构均设于内腔中,其主动轮、主动轴、驱动组件、从动轮及从动轴均受到导轨的保护作用,降低各部件受损的可能性。使用时,启动驱动组件,巡检机器人将在主动轮的作用下,沿导轨前进,同时,带动从动轮沿导轨滚动,相比较现有驱动机构采用两个驱动轮同侧驱动的方式而言,其两个主动轮由同一主动轴驱动,两主

巡检机器人及其行走机构.pdf
本发明公开了一种行走机构,其传动轴的中部同轴套装有轴承座和减速箱,传动轴的一侧平行设置有电机减速器,电机减速器的输出端设置有与其同轴联动的第一齿轮,传动轴上同轴套装有与第一齿轮相啮合的第二齿轮;传动轴的中部同轴套装有与轴承座相适配的第一圆锥滚子轴承,传动轴的内端部同轴套装有第二圆锥滚子轴承;传动轴的中部分别同轴套装有与轴承座相适配的第一深沟球轴承、与减速箱的外端板相适配的第二深沟球轴承,传动轴的内端部分别同轴套装有与减速箱的内端板相适配的第三深沟球轴承和第四深沟球轴承。该行走机构能够使得巡检机器人的转向和
煤化工智能巡检机器人、智能巡检系统及巡检方法.pdf
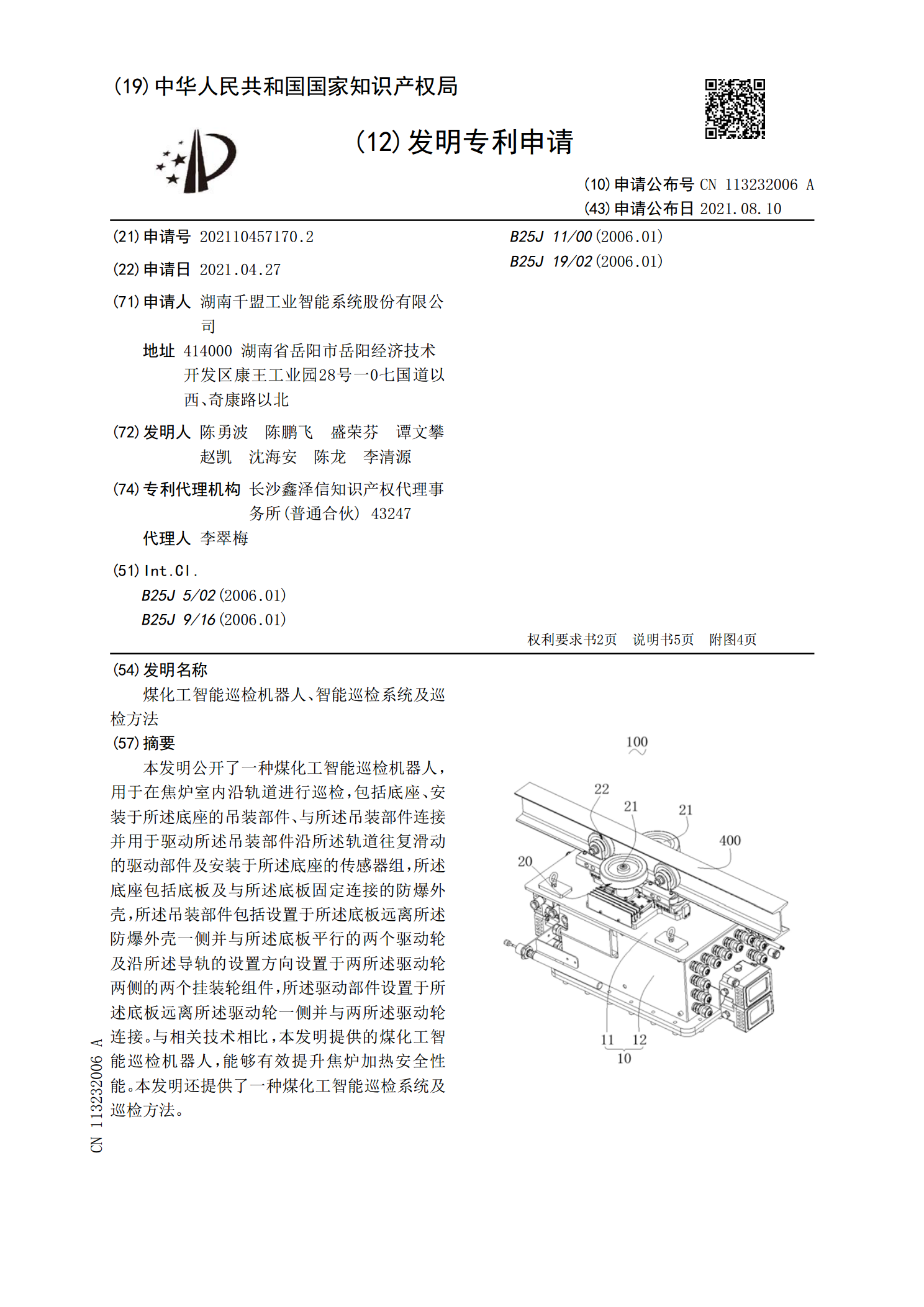
本发明公开了一种煤化工智能巡检机器人,用于在焦炉室内沿轨道进行巡检,包括底座、安装于所述底座的吊装部件、与所述吊装部件连接并用于驱动所述吊装部件沿所述轨道往复滑动的驱动部件及安装于所述底座的传感器组,所述底座包括底板及与所述底板固定连接的防爆外壳,所述吊装部件包括设置于所述底板远离所述防爆外壳一侧并与所述底板平行的两个驱动轮及沿所述导轨的设置方向设置于两所述驱动轮两侧的两个挂装轮组件,所述驱动部件设置于所述底板远离所述驱动轮一侧并与两所述驱动轮连接。与相关技术相比,本发明提供的煤化工智能巡检机器人,能够有