
一种基于曲线配准算法的列车受电弓磨耗检测方法.pdf

长春****主a


1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于曲线配准算法的列车受电弓磨耗检测方法.pdf
本发明公开了一种基于曲线配准算法的列车受电弓磨耗检测方法,该方法为:部署两个2D激光测距仪,并对两个2D激光测距仪进行标定;标定后的两个2D激光测距仪,分别采集受电弓滑板轮廓数据;对两个2D激光测距仪采集的轮廓数据进行坐标转换和数据融合,得到一条完整的受电弓滑板轮廓曲线,并进行倾斜校正;曲线配准:将倾斜校正后的受电弓滑板轮廓曲线与标准轮廓曲线,采用基于曲率不变量的曲线配准算法进行曲线配准;根据配准后的曲线,将磨耗轮廓曲线上的点坐标代入标准轮廓曲线即可得到各点磨耗值。本发明成本低、原理简单、实用性强,根据两
基于改进Canny边缘检测算法的受电弓磨耗检测方法.pdf
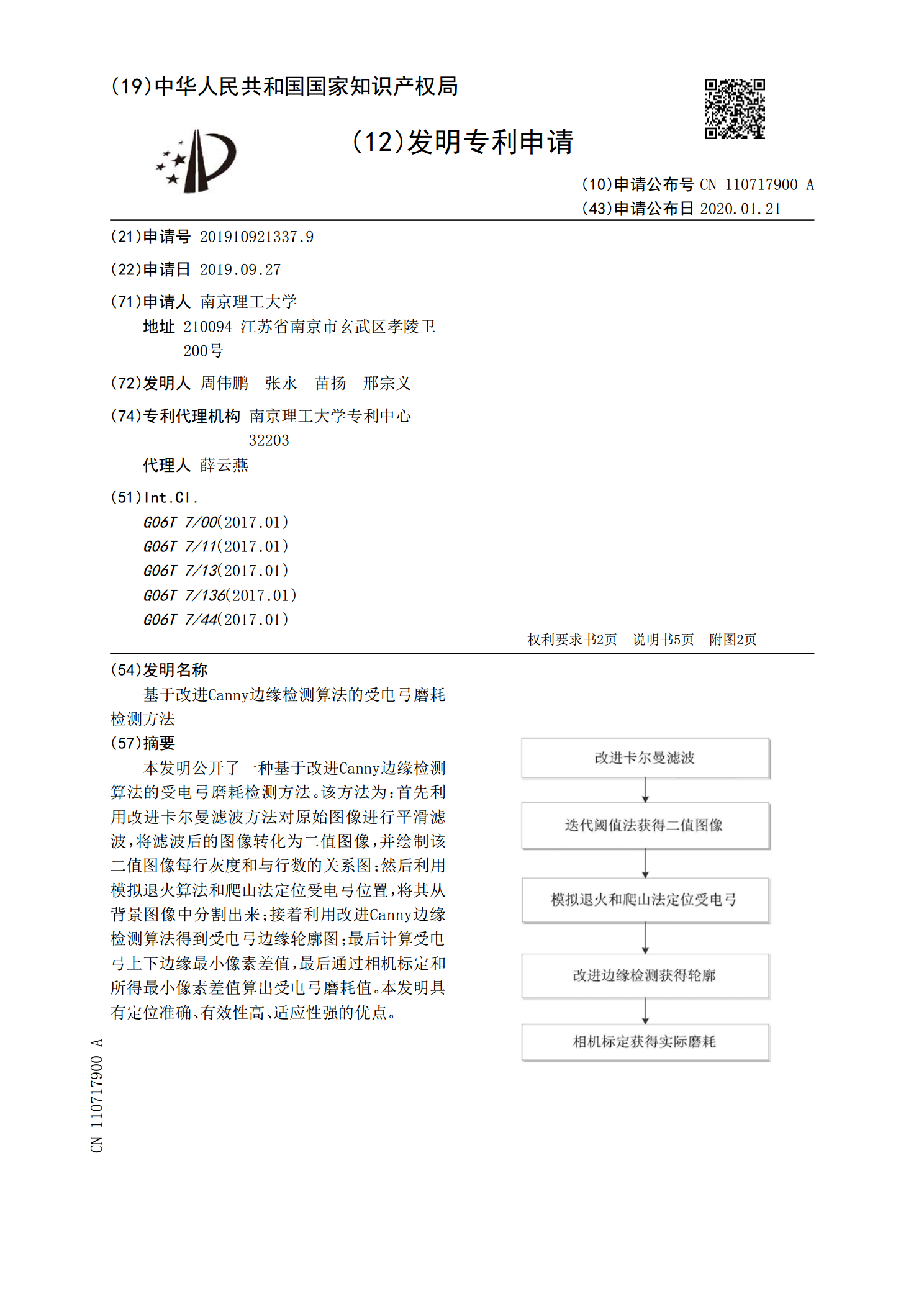
本发明公开了一种基于改进Canny边缘检测算法的受电弓磨耗检测方法。该方法为:首先利用改进卡尔曼滤波方法对原始图像进行平滑滤波,将滤波后的图像转化为二值图像,并绘制该二值图像每行灰度和与行数的关系图;然后利用模拟退火算法和爬山法定位受电弓位置,将其从背景图像中分割出来;接着利用改进Canny边缘检测算法得到受电弓边缘轮廓图;最后计算受电弓上下边缘最小像素差值,最后通过相机标定和所得最小像素差值算出受电弓磨耗值。本发明具有定位准确、有效性高、适应性强的优点。
一种基于图像的受电弓滑板磨耗在线检测装置与方法.pdf
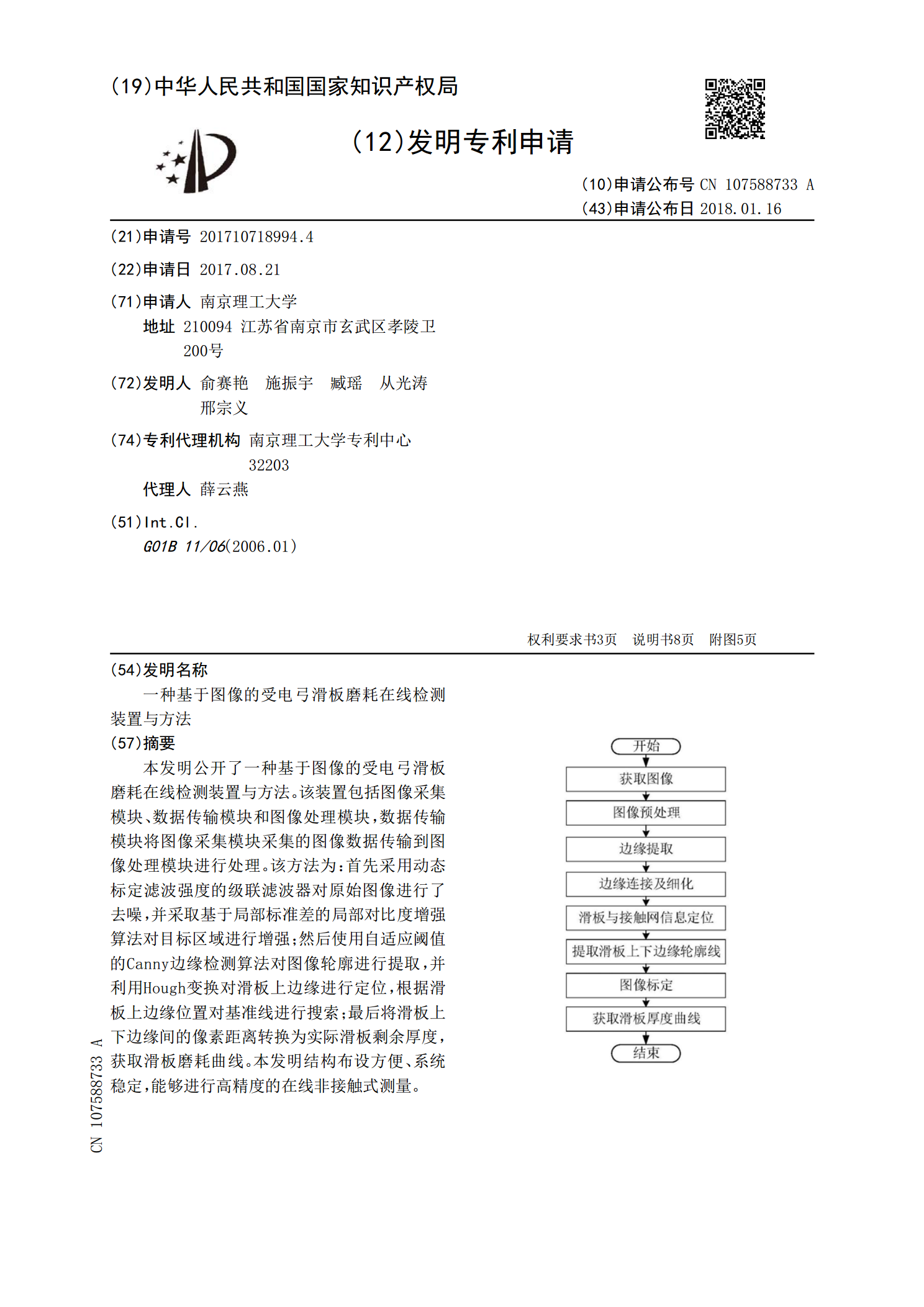
本发明公开了一种基于图像的受电弓滑板磨耗在线检测装置与方法。该装置包括图像采集模块、数据传输模块和图像处理模块,数据传输模块将图像采集模块采集的图像数据传输到图像处理模块进行处理。该方法为:首先采用动态标定滤波强度的级联滤波器对原始图像进行了去噪,并采取基于局部标准差的局部对比度增强算法对目标区域进行增强;然后使用自适应阈值的Canny边缘检测算法对图像轮廓进行提取,并利用Hough变换对滑板上边缘进行定位,根据滑板上边缘位置对基准线进行搜索;最后将滑板上下边缘间的像素距离转换为实际滑板剩余厚度,获取滑板

基于OpenGL的受电弓磨耗检测系统图像化设计.docx
基于OpenGL的受电弓磨耗检测系统图像化设计概述:随着铁路运输业的快速发展和高速铁路的建设,受电弓磨耗检测技术已经成为铁路行业的一个热点话题。受电弓是电力化铁路的核心部件之一,其工作状态直接影响电力系统的性能和安全性。因此,对受电弓的磨耗情况进行及时检测,以便及时更换或维修,成为保证电力化铁路安全运营的重要手段。本文针对基于OpenGL的受电弓磨耗检测系统图像化设计,阐述了该系统的设计思路和实现方法,介绍了OpenGL的基本概念和相关技术,并结合具体实例详细讲解了OpenGL在系统图像化设计中的应用。一

一种受电弓碳滑板磨耗检测系统.pdf
一种受电弓碳滑板磨耗检测系统,包括数据采集单元、数据处理单元和控制中心,数据采集单元包括射频标签和与射频读写器,控制中心控制射频读写器工作;射频标签布设于受电弓碳滑板磨耗区的不同区域和不同深度处;射频读写器读取留在受电弓碳滑板上的未损伤的射频标签接收询问信号后返回的包含身份信息的应答信号,并将所述应答信号发送给数据处理单元;数据处理单元储存有所有射频标签的身份信息和每个射频标签在受电弓碳滑板上的布设位置,根据射频读写器读取的身份信息,统计分析不同磨耗区域射频标签损伤和掉落情况,进而判断受电弓碳滑板的磨耗值