
一种智能网联汽车的拟人跟车决策控制方法.pdf

努力****星驰


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种智能网联汽车的拟人跟车决策控制方法.pdf
本发明公开了一种智能网联汽车的拟人跟车决策控制方法,步骤如下:根据人类驾驶车辆跟车工况的数据集,求解数据集中所有车辆的平均加速度,数据集中所有车辆在起步时刻的平均加速度和数据集中所有车辆在车速为70km/h以上时的平均加速度;自车通过与前车的无线通讯,获取前车加速度和前车车身长度;求解得到前车与自车在预测时域内期望纵向相对位置序列和期望纵向相对速度序列;求解得到自车在当前时刻的最优加速度和最优前轮转角;自车按最优加速度和最优前轮转角进行相应的加减速和转向操作。本发明求解出自车在跟车工况下的最优加速度和前轮
一种节能型智能网联混合动力汽车跟车控制方法.pdf
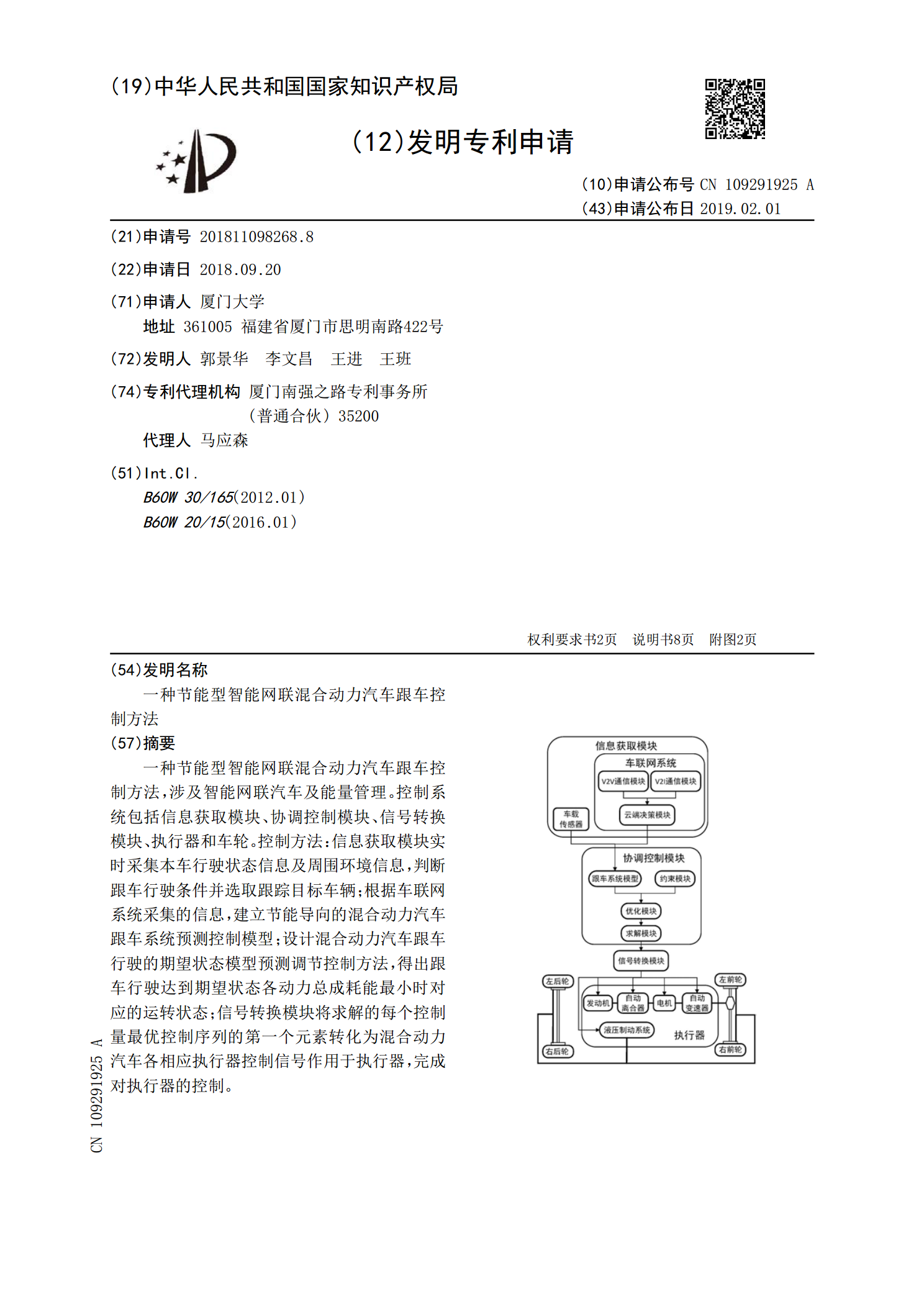
一种节能型智能网联混合动力汽车跟车控制方法,涉及智能网联汽车及能量管理。控制系统包括信息获取模块、协调控制模块、信号转换模块、执行器和车轮。控制方法:信息获取模块实时采集本车行驶状态信息及周围环境信息,判断跟车行驶条件并选取跟踪目标车辆;根据车联网系统采集的信息,建立节能导向的混合动力汽车跟车系统预测控制模型;设计混合动力汽车跟车行驶的期望状态模型预测调节控制方法,得出跟车行驶达到期望状态各动力总成耗能最小时对应的运转状态;信号转换模块将求解的每个控制量最优控制序列的第一个元素转化为混合动力汽车各相应执行

一种车路协同环境下的智能网联车辆的跟驰方法.pdf
本发明公开了一种车路协同环境下的智能网联车辆的跟驰方法,包括以下步骤:步骤1、构建基于车路协同的安全速度模型;步骤2、构建基于考虑道路条件的可变车头间距模型;步骤3、预测跟驰车预瞄时刻的最优速度;步骤4、计算跟驰车预瞄时刻的加速度。有益效果:本发明基于道路状况和多前车运动状态提出了跟驰车最优速度预测函数,综合考虑了车路协同环境下道路因素和多前车信息对微观跟驰行为的影响,本发明考虑道路因素和多前车信息的跟驰模型能够有效解释车路协同环境下智能网联车辆跟驰行为;本发明能够以较高的精度拟合跟驰过程,且与FVD等模

一种网联车系统的智能调度方法.pdf
本发明公开了一种网联车系统的智能调度方法,属于智慧交通领域;具体包括:首先,获取真实的道路网络信息,构建交通网络图;基于分区模型把交通网络图划分为多个不相交的区域;然后,获取实时的车辆密度信息,将其输入至神经网络中,输出每对相邻区域的预估行驶时间,进一步计算每个区域到达相邻区域及其自身的权重;获取各个区域服务范围内的实时供需信息,将其输入至匹配模型,输出车辆与乘客匹配的结果并执行;将各区域剩余的供需信息和权重信息输入强化学习调度模型中,输出车辆的调度策略并执行;本发明考虑了实时区域间行驶时间,以提高调度模

一种用于智能网联汽车的数据筛选方法.pdf
本发明公开了一种用于智能网联汽车的数据筛选方法,涉及智能网联汽车领域,该方法中,第一车辆根据预设行车路径上下个时刻的行驶状态确定对应的位置筛选条件,根据接收到的所有第二车辆信息中的第二车辆偏航角和第二车辆坐标筛选出符合位置筛选条件且与第一车辆坐标距离最近的第二车辆信息为目标信息,保留目标信息并滤除其他第二车辆信息;该方法可以有效地过滤筛选出与自身车辆相关的有用信息、去除掉无关信息,避免信息冗余,有效信息提取效率高。