
智能巡检机器人系统及设备.pdf

小宏****aa

1/9

2/9

3/9

4/9
5/9

6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
智能巡检机器人系统及设备.pdf
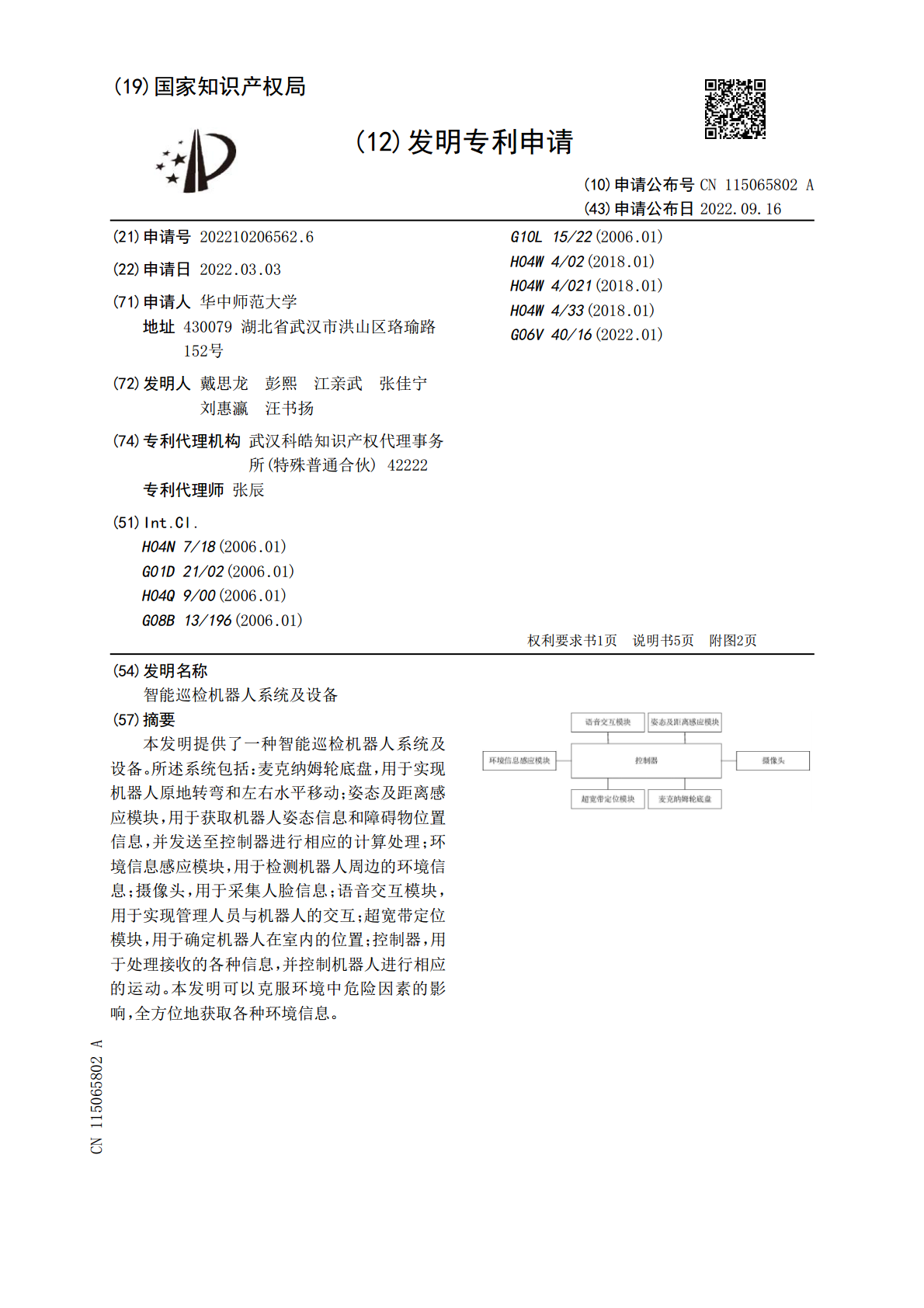
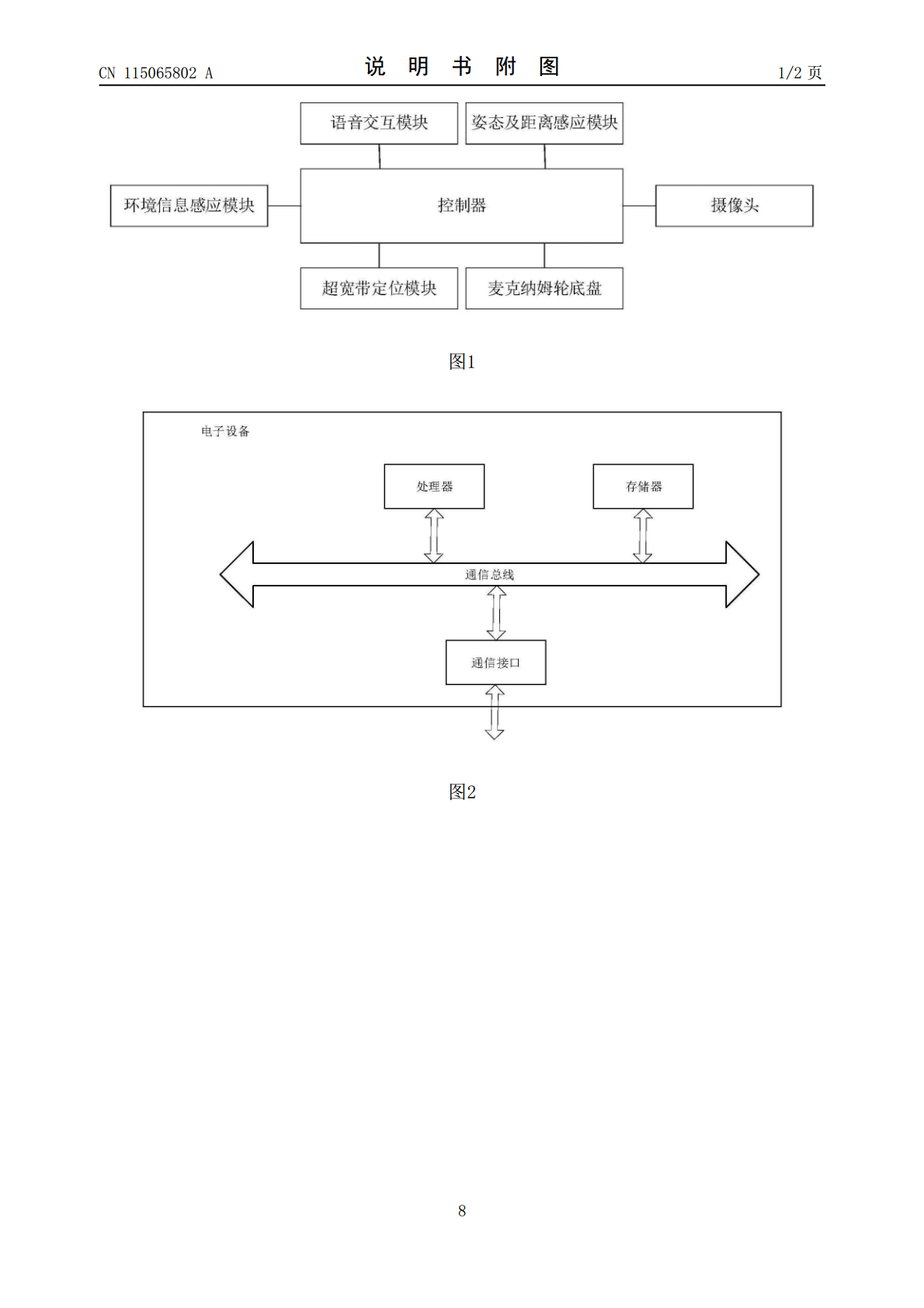
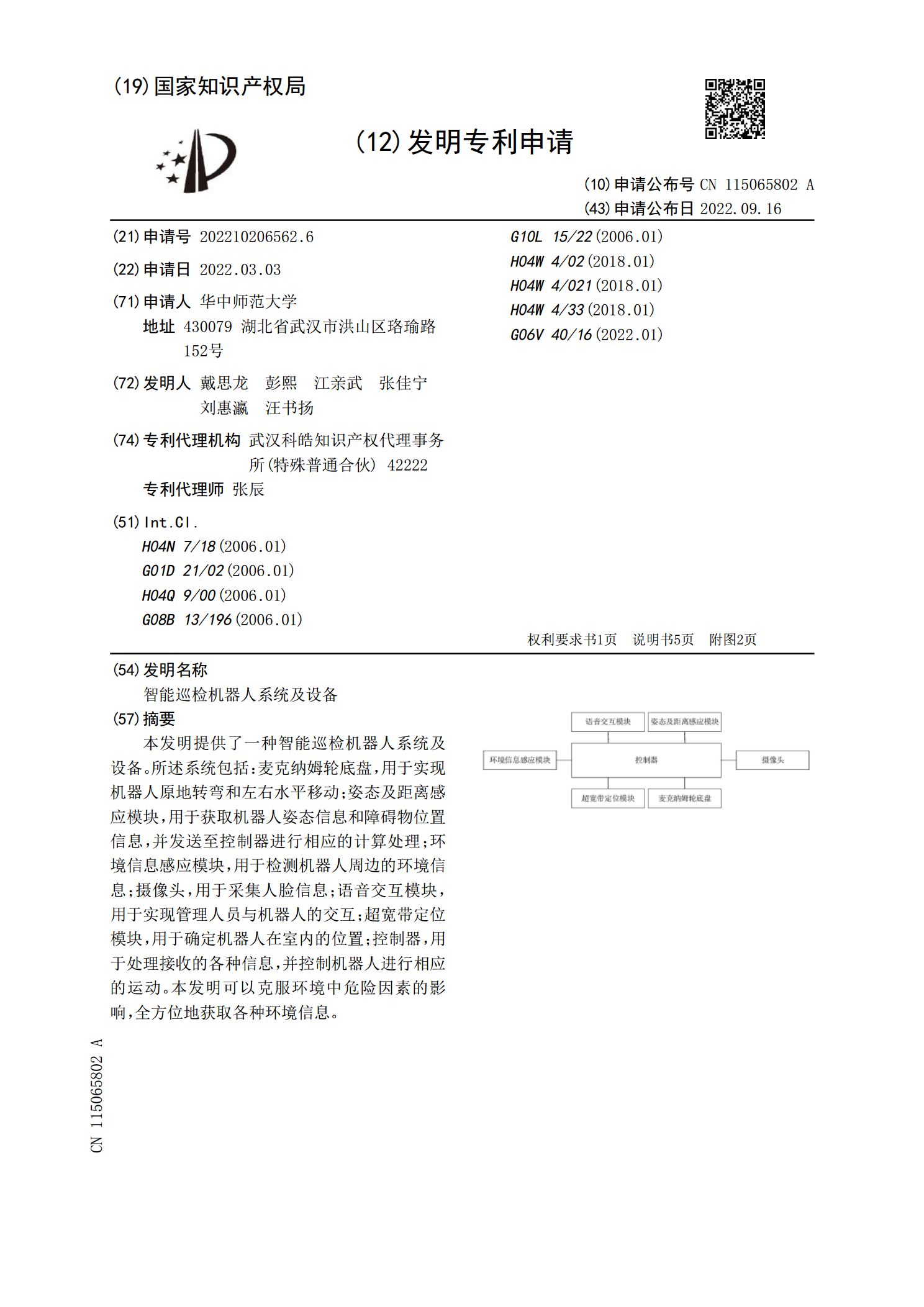
本发明提供了一种智能巡检机器人系统及设备。所述系统包括:麦克纳姆轮底盘,用于实现机器人原地转弯和左右水平移动;姿态及距离感应模块,用于获取机器人姿态信息和障碍物位置信息,并发送至控制器进行相应的计算处理;环境信息感应模块,用于检测机器人周边的环境信息;摄像头,用于采集人脸信息;语音交互模块,用于实现管理人员与机器人的交互;超宽带定位模块,用于确定机器人在室内的位置;控制器,用于处理接收的各种信息,并控制机器人进行相应的运动。本发明可以克服环境中危险因素的影响,全方位地获取各种环境信息。
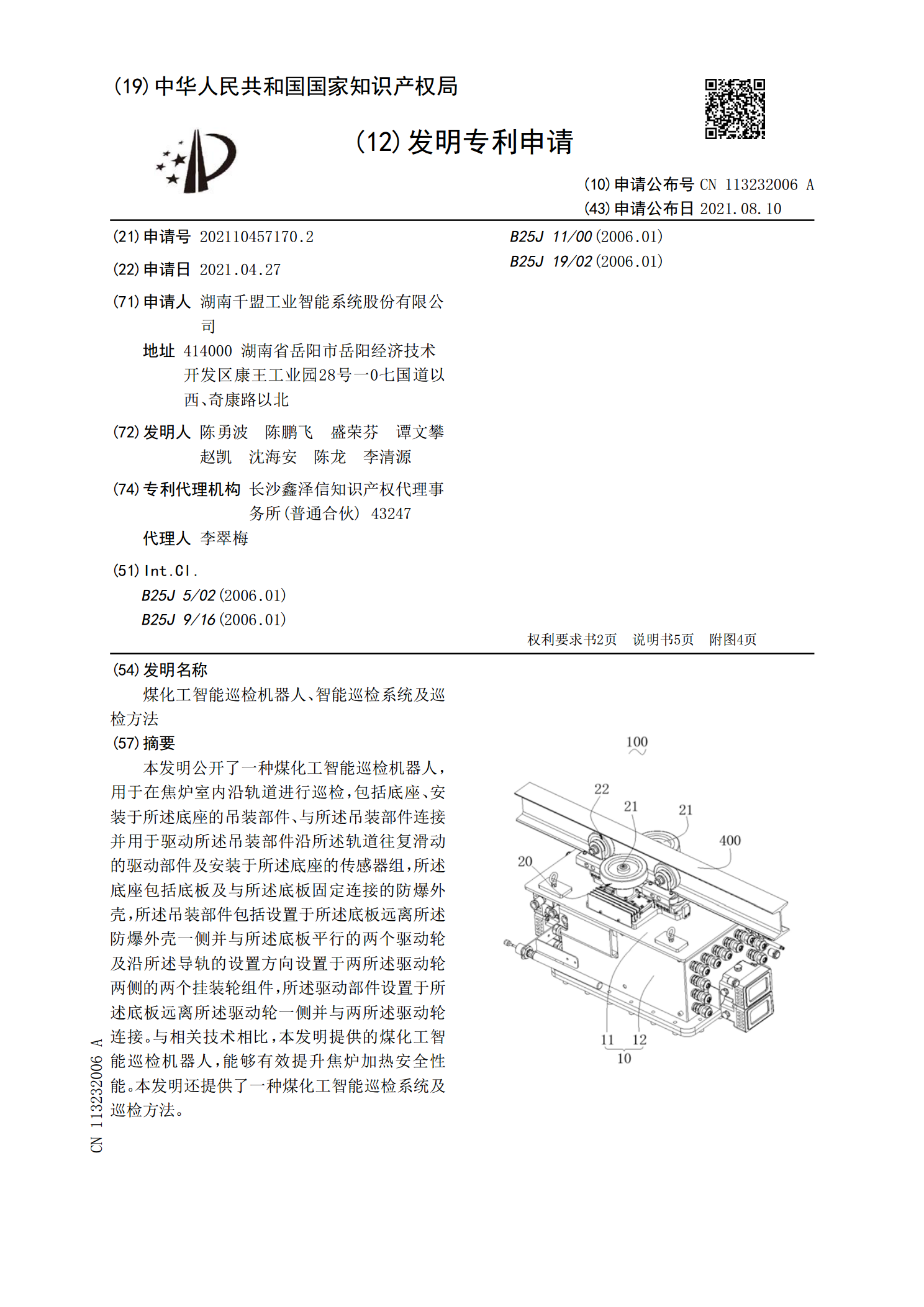
煤化工智能巡检机器人、智能巡检系统及巡检方法.pdf
本发明公开了一种煤化工智能巡检机器人,用于在焦炉室内沿轨道进行巡检,包括底座、安装于所述底座的吊装部件、与所述吊装部件连接并用于驱动所述吊装部件沿所述轨道往复滑动的驱动部件及安装于所述底座的传感器组,所述底座包括底板及与所述底板固定连接的防爆外壳,所述吊装部件包括设置于所述底板远离所述防爆外壳一侧并与所述底板平行的两个驱动轮及沿所述导轨的设置方向设置于两所述驱动轮两侧的两个挂装轮组件,所述驱动部件设置于所述底板远离所述驱动轮一侧并与两所述驱动轮连接。与相关技术相比,本发明提供的煤化工智能巡检机器人,能够有
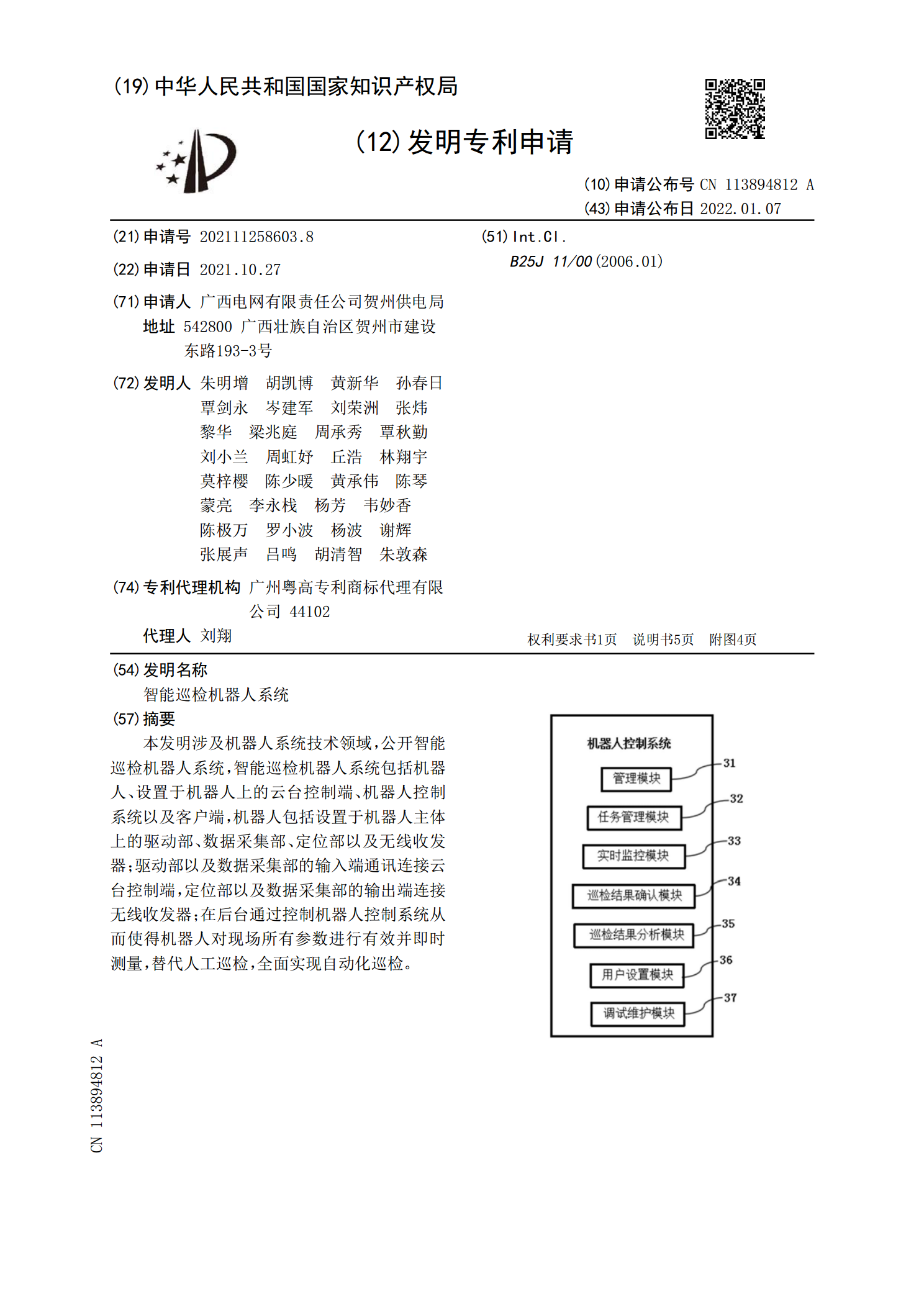
智能巡检机器人系统.pdf
本发明涉及机器人系统技术领域,公开智能巡检机器人系统,智能巡检机器人系统包括机器人、设置于机器人上的云台控制端、机器人控制系统以及客户端,机器人包括设置于机器人主体上的驱动部、数据采集部、定位部以及无线收发器;驱动部以及数据采集部的输入端通讯连接云台控制端,定位部以及数据采集部的输出端连接无线收发器;在后台通过控制机器人控制系统从而使得机器人对现场所有参数进行有效并即时测量,替代人工巡检,全面实现自动化巡检。

智能设备巡检系统.ppt
目录1、系统工作原理巡视人员用掌上电脑扫描条码系统自动提示该设备应该检查的内容巡检员通过简单的操作输入设备当前状态巡视工作管理自动化提高对设备的监测能力巡检记录无纸化巡视设备状态监测自动化巡视内容专家库化巡视到位监督自动化2.1巡视工作管理自动化使用巡检系统后巡检人员不需要再填写各种巡检表格系统可以自动记录巡视人员、时间、设备、巡视情况等信息并按照用户的要求查询、打印报表真正实现了巡检工作的无纸化。巡检员巡视设备时如果设备当前的监测数据超过规定的上下限掌上电脑会立刻报警提醒巡检员重点巡视。另外系统也可
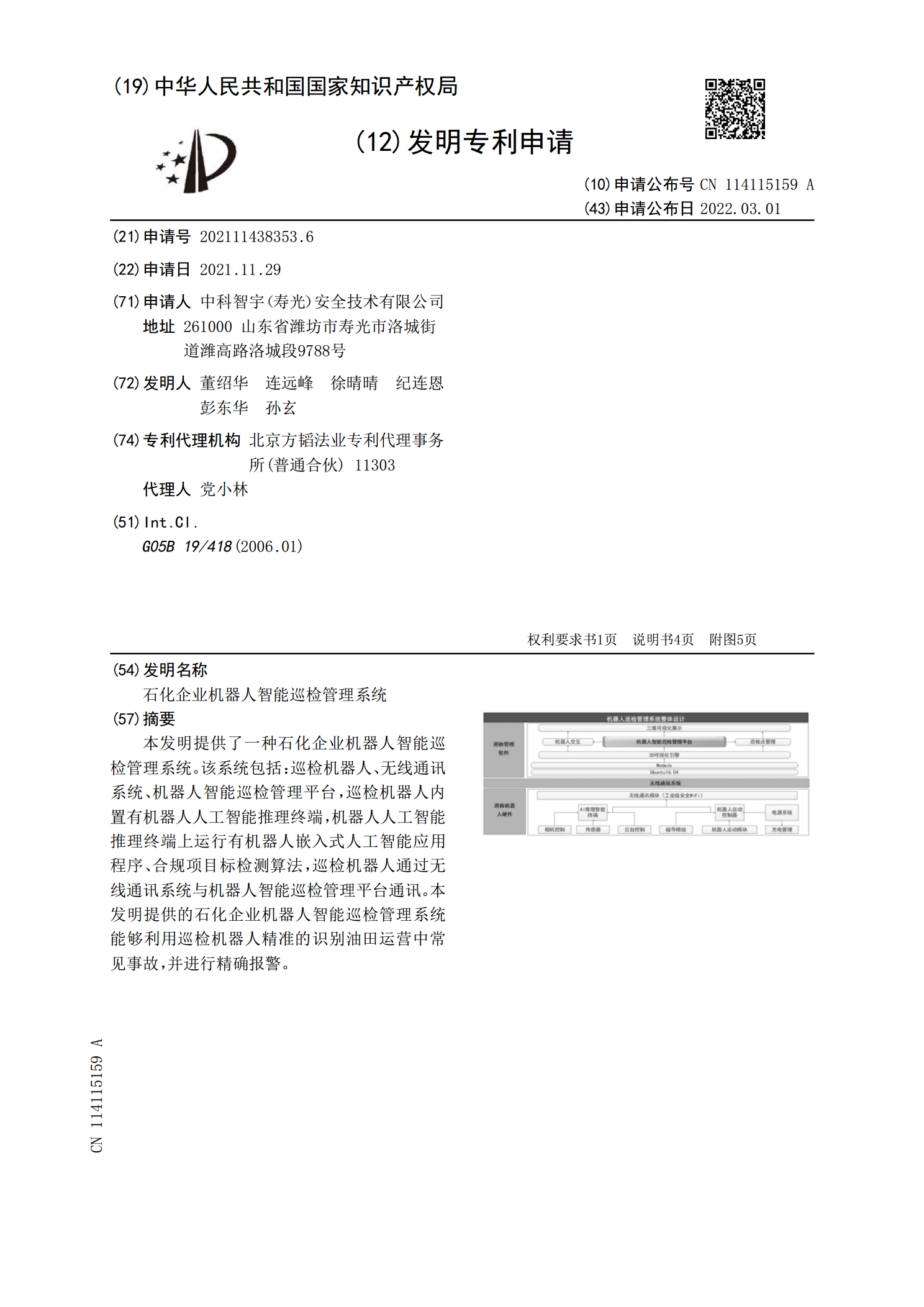
石化企业机器人智能巡检管理系统.pdf
本发明提供了一种石化企业机器人智能巡检管理系统。该系统包括:巡检机器人、无线通讯系统、机器人智能巡检管理平台,巡检机器人内置有机器人人工智能推理终端,机器人人工智能推理终端上运行有机器人嵌入式人工智能应用程序、合规项目标检测算法,巡检机器人通过无线通讯系统与机器人智能巡检管理平台通讯。本发明提供的石化企业机器人智能巡检管理系统能够利用巡检机器人精准的识别油田运营中常见事故,并进行精确报警。