
一种全矢量线控底盘的协调控制系统.pdf

永梅****33

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种全矢量线控底盘的协调控制系统.pdf
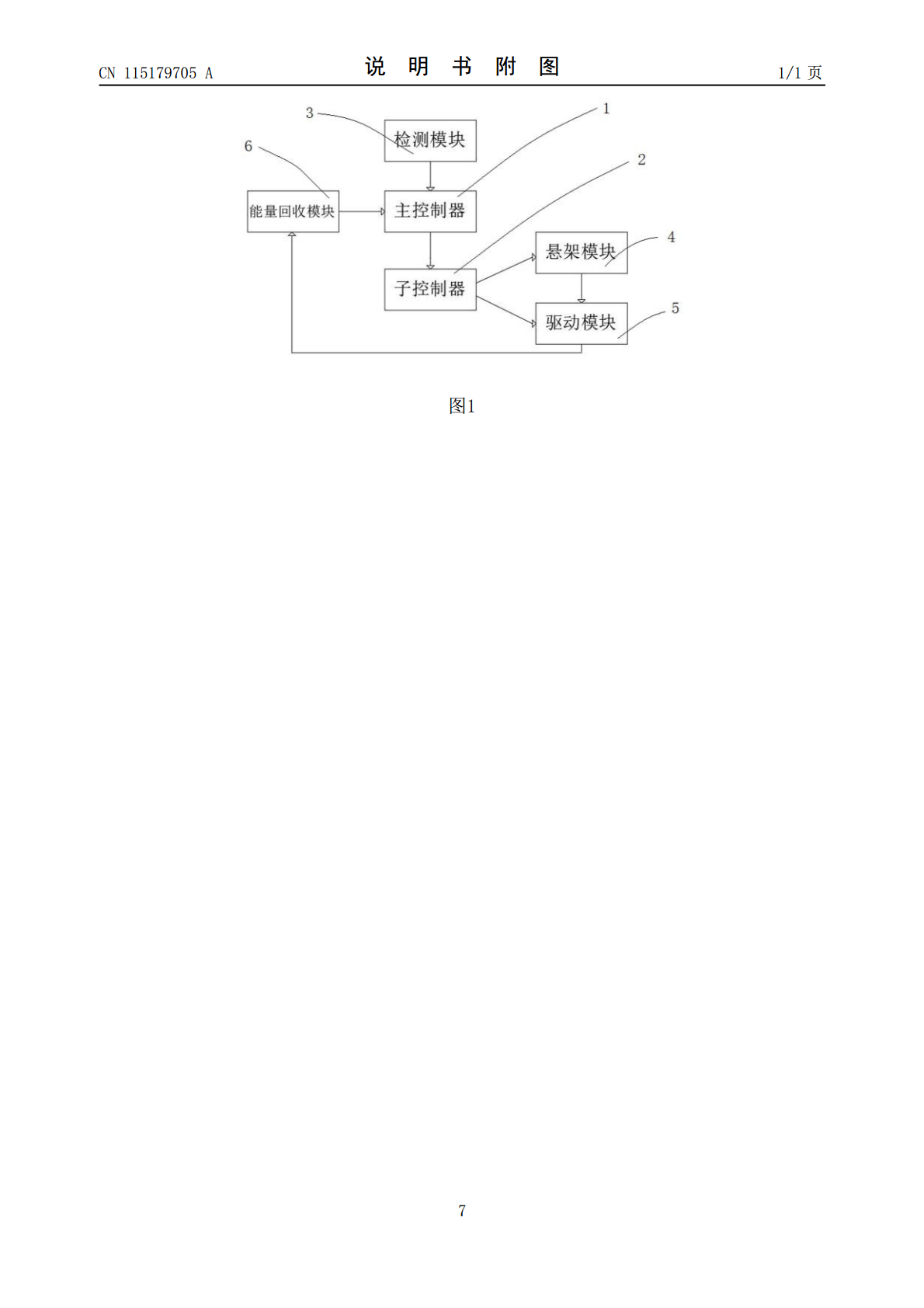
本发明公开了一种全矢量线控底盘的协调控制系统,包括:主控制器以及与主控制器相连接的子控制器、检测模块、悬架模块和驱动模块,所述主控制器,负责调控底盘的动力分配和4个电动车轮的动态协调;所述子控制器,能够独立控制单个电动车轮的转向、制动控制。其有益效果是,该全矢量线控底盘的协调控制系统,通过主控制器能够将检测模块反馈的路况清理进行处理,进而生产路况模型,搭配子控制器、悬架模块和驱动模块,能够使得汽车的轮毂遇到相应的路面状况时,提前做好调整,改变空气悬架的高度,既保证悬架对于车身的有力的支撑,又使得底盘整体的
一种飞行汽车线控底盘控制系统.pdf
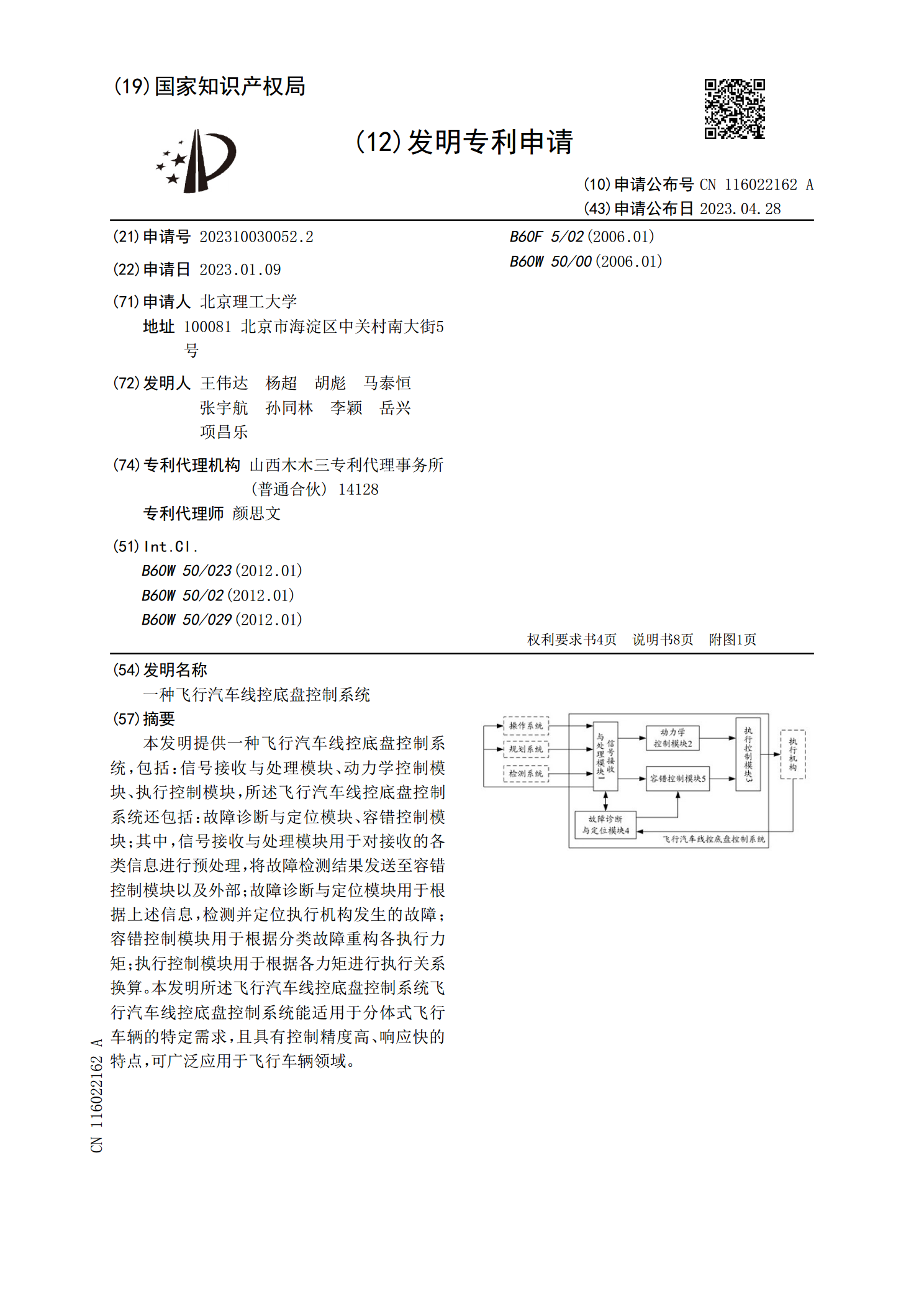
本发明提供一种飞行汽车线控底盘控制系统,包括:信号接收与处理模块、动力学控制模块、执行控制模块,所述飞行汽车线控底盘控制系统还包括:故障诊断与定位模块、容错控制模块;其中,信号接收与处理模块用于对接收的各类信息进行预处理,将故障检测结果发送至容错控制模块以及外部;故障诊断与定位模块用于根据上述信息,检测并定位执行机构发生的故障;容错控制模块用于根据分类故障重构各执行力矩;执行控制模块用于根据各力矩进行执行关系换算。本发明所述飞行汽车线控底盘控制系统飞行汽车线控底盘控制系统能适用于分体式飞行车辆的特定需求,
一种便于清洁的线控底盘.pdf
本发明涉及线控底盘附属装置的技术领域,特别是涉及一种便于清洁的线控底盘,其结构简单,便于对线控底盘底盘的尘土进行清理,提高对电池的散热效果;包括线控底盘,线控底盘左侧设置有后轮架,线控底盘右侧设置有前轮架以及车头架,线控底盘中部设置有电池放置槽,还包括螺纹杆、往复丝杠、限位杆和固定杆,线控底盘前端固定连接有第一箱体,第一箱体内部中空且右侧壁连通有开口,第一箱体内部设置有两组第一轴承,螺纹杆与两组第一轴承内圈连接,螺纹杆上设置有第一锥齿轮,第一箱体内部设置有第一电机,第一电机输出端设置有与第一锥齿轮啮合的第
一种用于平台化开发线控底盘系统的集中式控制系统.pdf
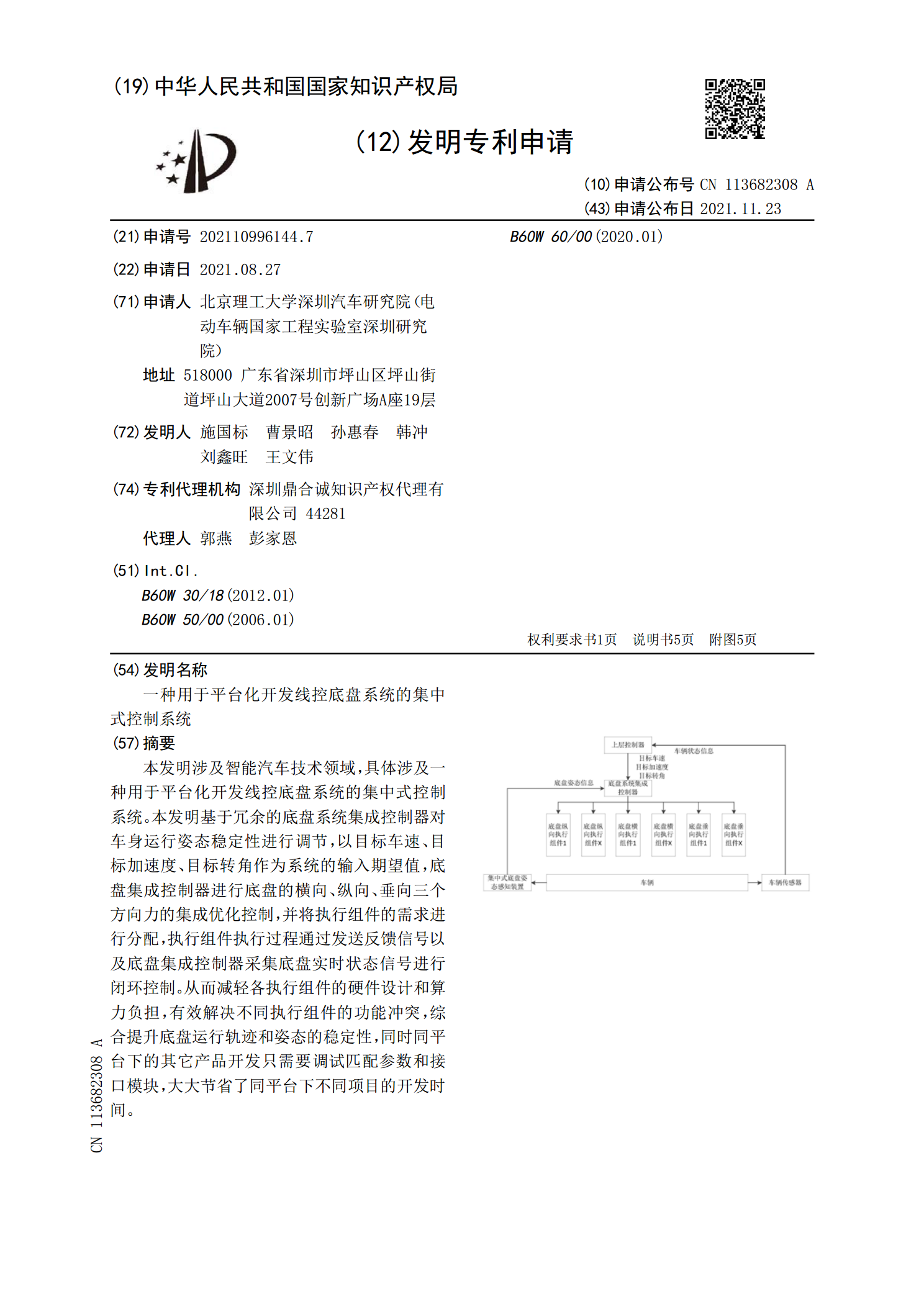
本发明涉及智能汽车技术领域,具体涉及一种用于平台化开发线控底盘系统的集中式控制系统。本发明基于冗余的底盘系统集成控制器对车身运行姿态稳定性进行调节,以目标车速、目标加速度、目标转角作为系统的输入期望值,底盘集成控制器进行底盘的横向、纵向、垂向三个方向力的集成优化控制,并将执行组件的需求进行分配,执行组件执行过程通过发送反馈信号以及底盘集成控制器采集底盘实时状态信号进行闭环控制。从而减轻各执行组件的硬件设计和算力负担,有效解决不同执行组件的功能冲突,综合提升底盘运行轨迹和姿态的稳定性,同时同平台下的其它产品
基于UWB定位的线控底盘轨迹跟踪控制系统及方法.pdf
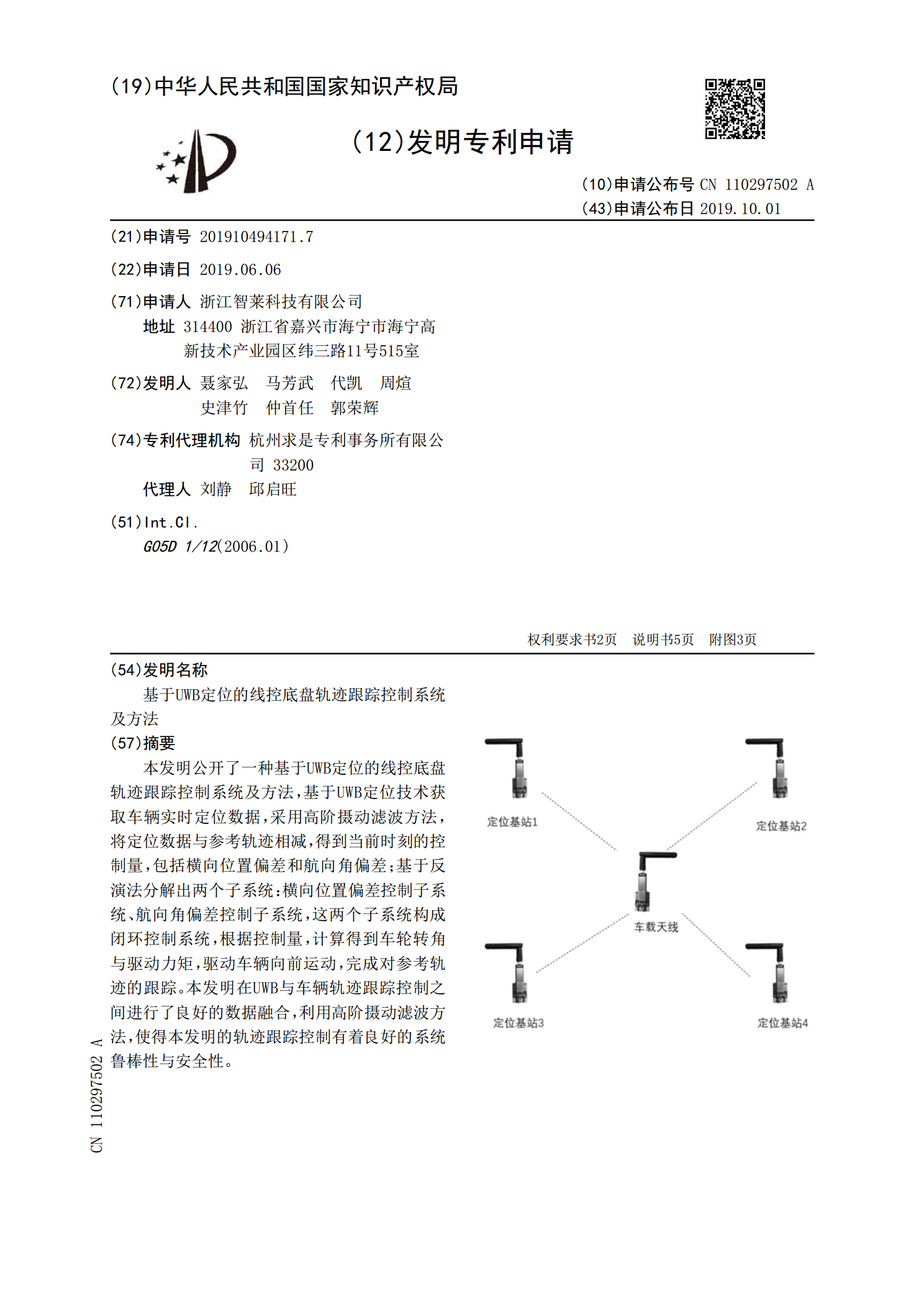
本发明公开了一种基于UWB定位的线控底盘轨迹跟踪控制系统及方法,基于UWB定位技术获取车辆实时定位数据,采用高阶摄动滤波方法,将定位数据与参考轨迹相减,得到当前时刻的控制量,包括横向位置偏差和航向角偏差;基于反演法分解出两个子系统:横向位置偏差控制子系统、航向角偏差控制子系统,这两个子系统构成闭环控制系统,根据控制量,计算得到车轮转角与驱动力矩,驱动车辆向前运动,完成对参考轨迹的跟踪。本发明在UWB与车辆轨迹跟踪控制之间进行了良好的数据融合,利用高阶摄动滤波方法,使得本发明的轨迹跟踪控制有着良好的系统鲁棒