
一种用于平台化开发线控底盘系统的集中式控制系统.pdf

睿德****找我

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于平台化开发线控底盘系统的集中式控制系统.pdf
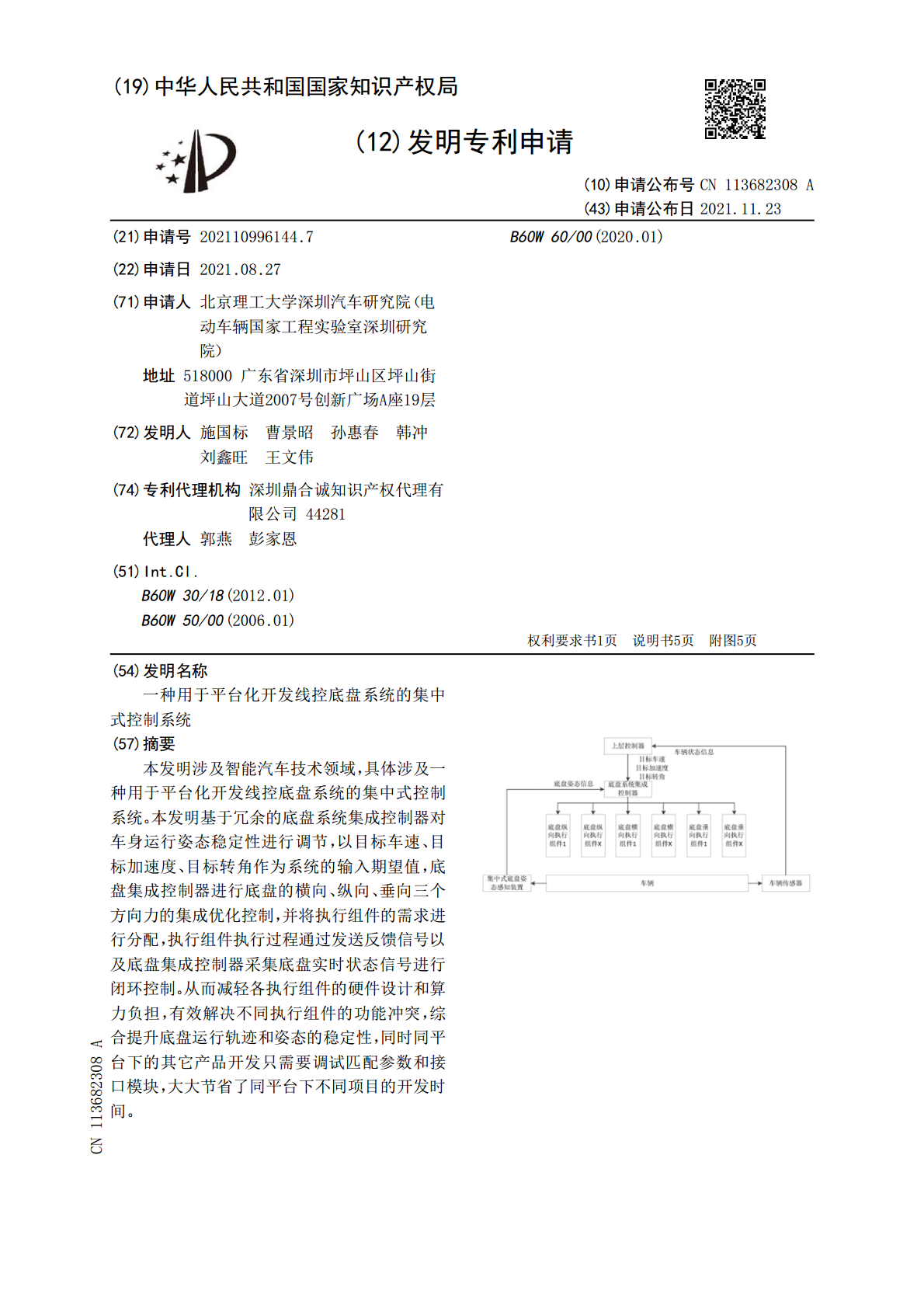
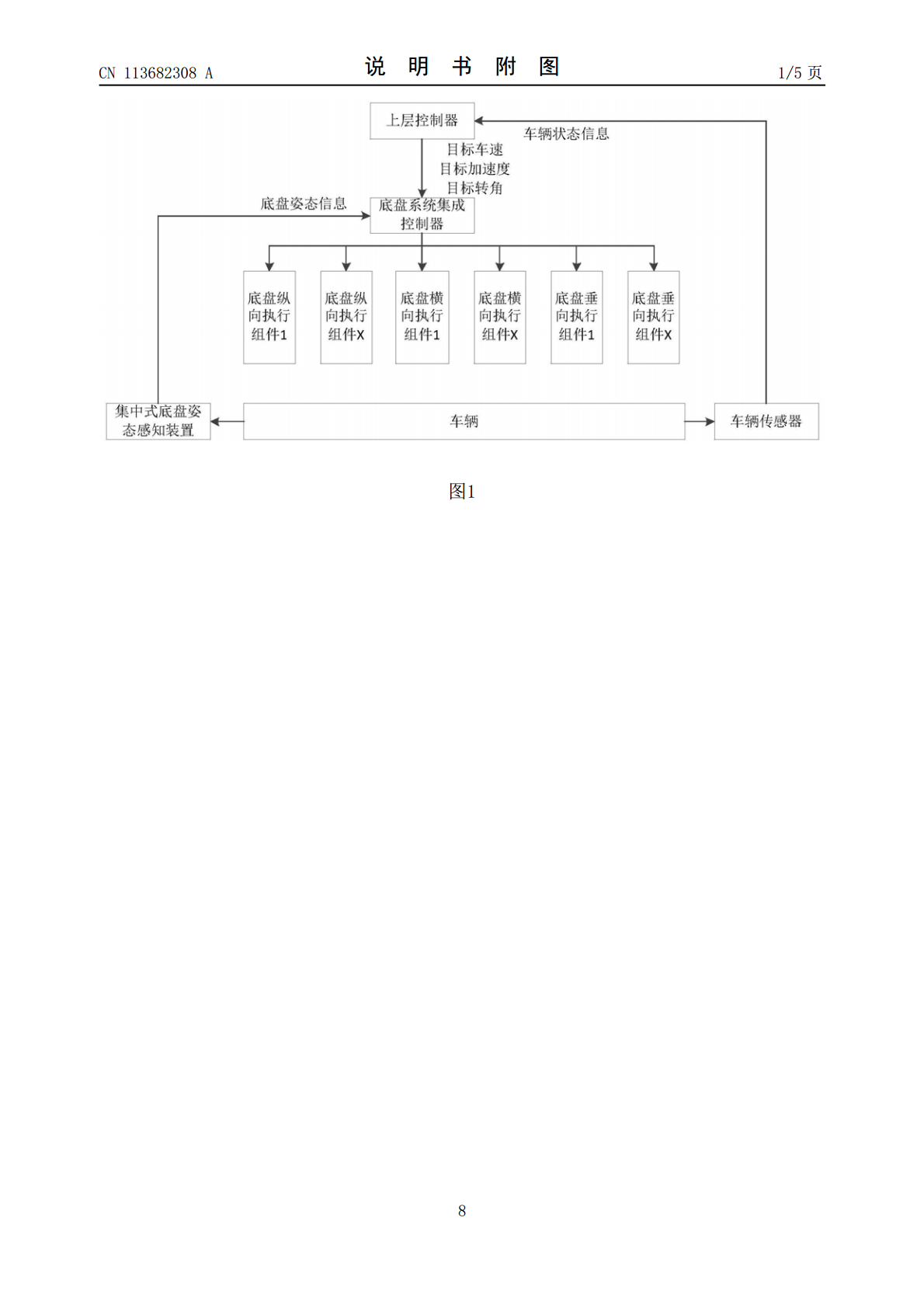
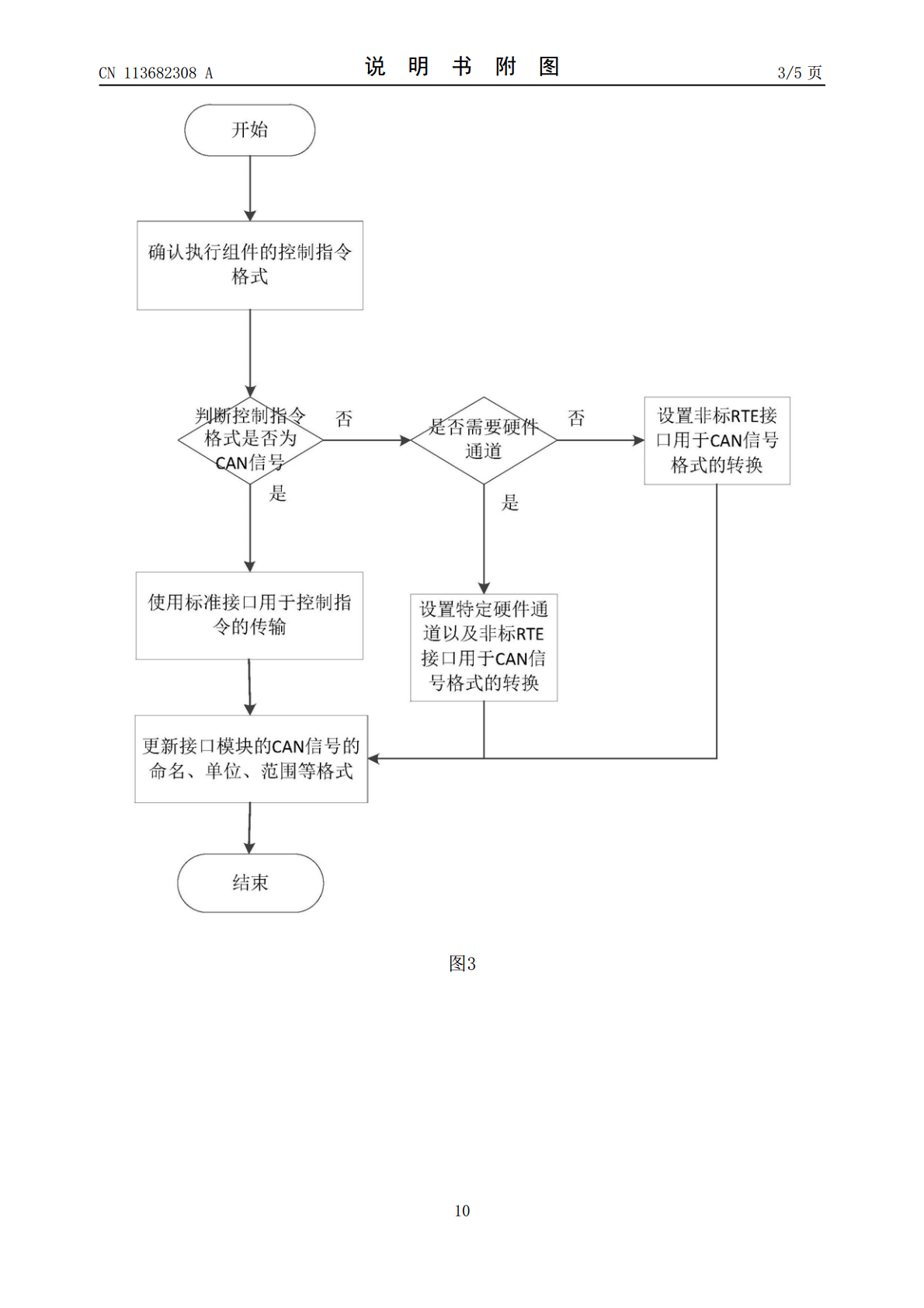
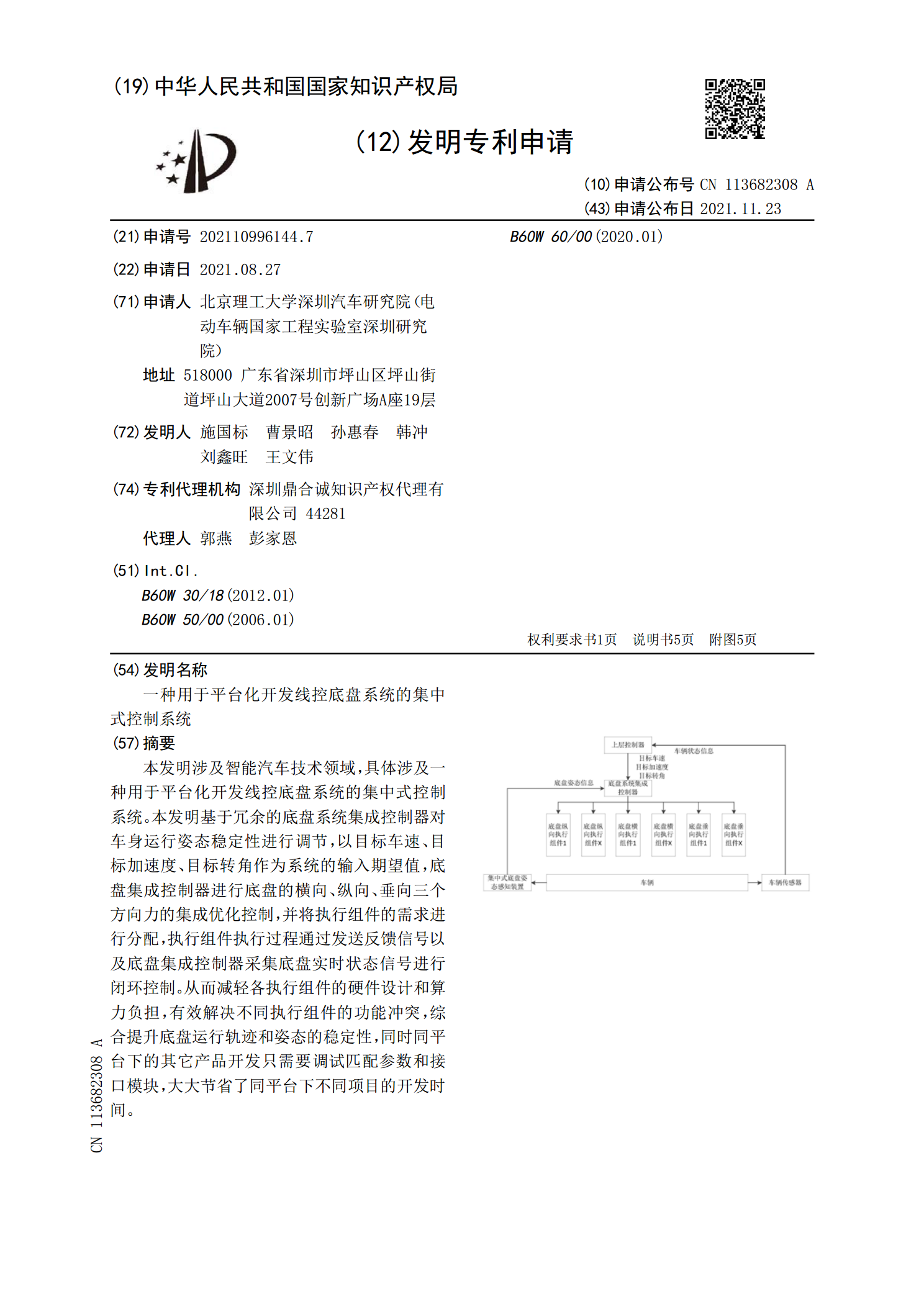
本发明涉及智能汽车技术领域,具体涉及一种用于平台化开发线控底盘系统的集中式控制系统。本发明基于冗余的底盘系统集成控制器对车身运行姿态稳定性进行调节,以目标车速、目标加速度、目标转角作为系统的输入期望值,底盘集成控制器进行底盘的横向、纵向、垂向三个方向力的集成优化控制,并将执行组件的需求进行分配,执行组件执行过程通过发送反馈信号以及底盘集成控制器采集底盘实时状态信号进行闭环控制。从而减轻各执行组件的硬件设计和算力负担,有效解决不同执行组件的功能冲突,综合提升底盘运行轨迹和姿态的稳定性,同时同平台下的其它产品
一种飞行汽车线控底盘控制系统.pdf
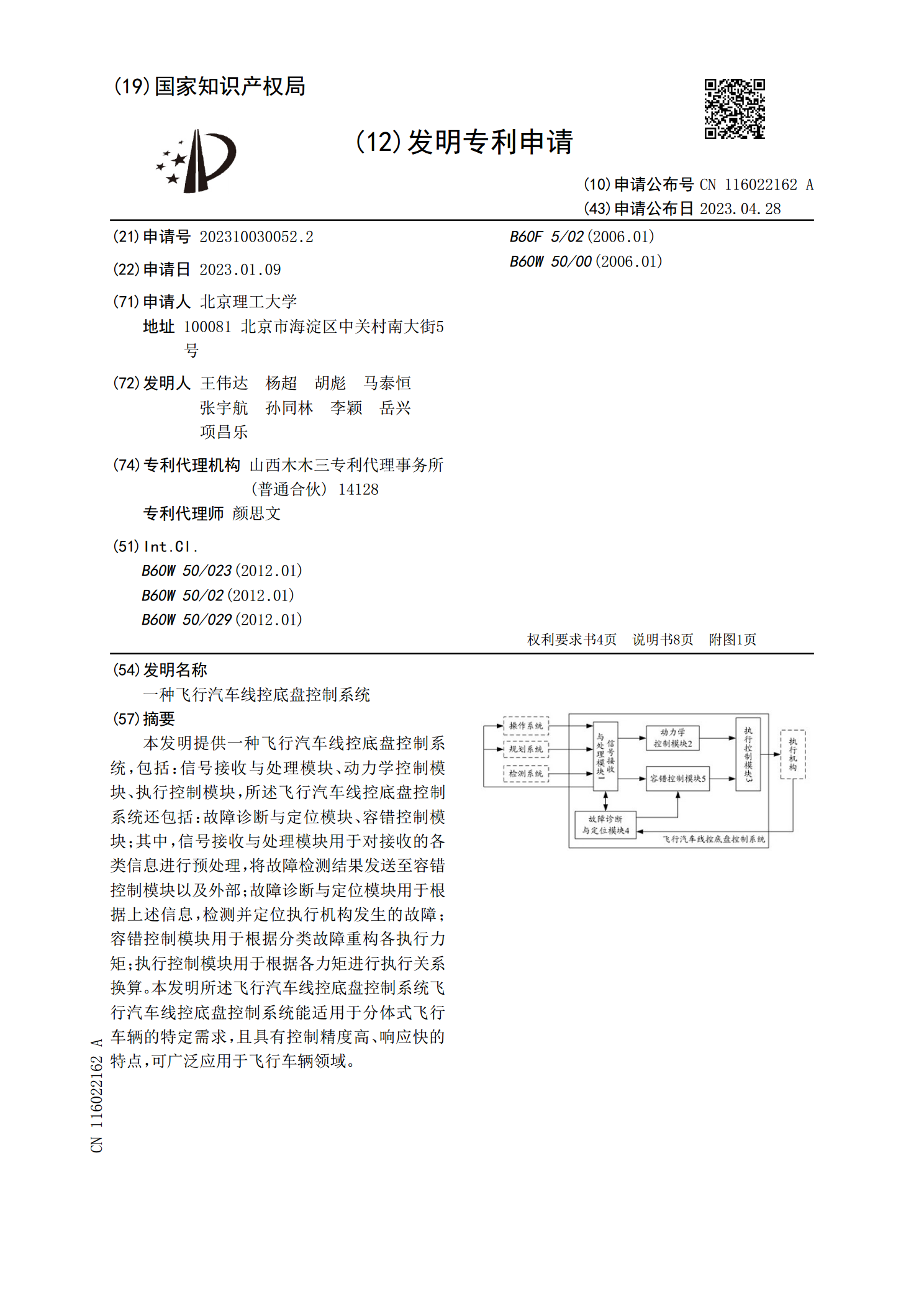
本发明提供一种飞行汽车线控底盘控制系统,包括:信号接收与处理模块、动力学控制模块、执行控制模块,所述飞行汽车线控底盘控制系统还包括:故障诊断与定位模块、容错控制模块;其中,信号接收与处理模块用于对接收的各类信息进行预处理,将故障检测结果发送至容错控制模块以及外部;故障诊断与定位模块用于根据上述信息,检测并定位执行机构发生的故障;容错控制模块用于根据分类故障重构各执行力矩;执行控制模块用于根据各力矩进行执行关系换算。本发明所述飞行汽车线控底盘控制系统飞行汽车线控底盘控制系统能适用于分体式飞行车辆的特定需求,
一种全矢量线控底盘的协调控制系统.pdf
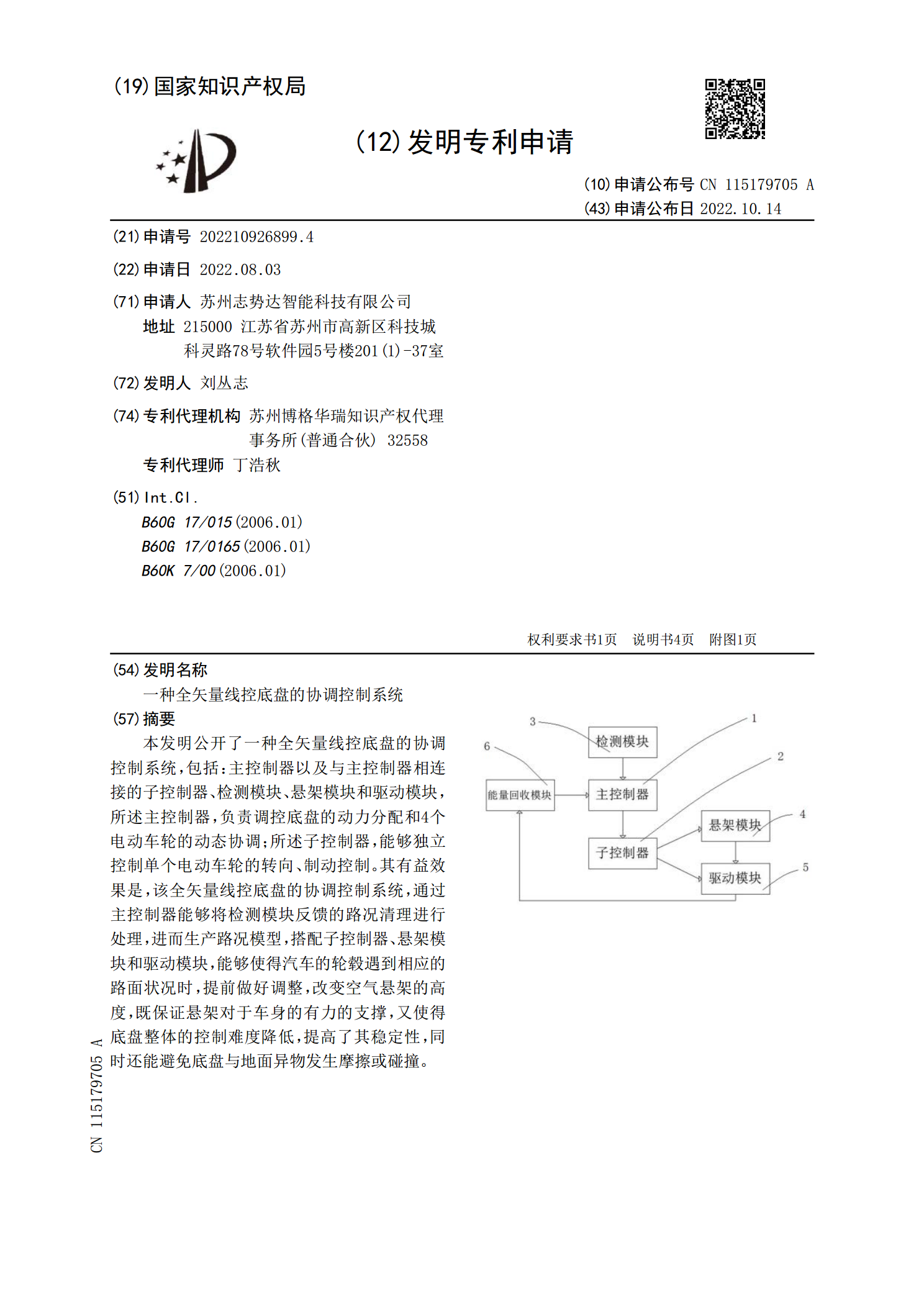
本发明公开了一种全矢量线控底盘的协调控制系统,包括:主控制器以及与主控制器相连接的子控制器、检测模块、悬架模块和驱动模块,所述主控制器,负责调控底盘的动力分配和4个电动车轮的动态协调;所述子控制器,能够独立控制单个电动车轮的转向、制动控制。其有益效果是,该全矢量线控底盘的协调控制系统,通过主控制器能够将检测模块反馈的路况清理进行处理,进而生产路况模型,搭配子控制器、悬架模块和驱动模块,能够使得汽车的轮毂遇到相应的路面状况时,提前做好调整,改变空气悬架的高度,既保证悬架对于车身的有力的支撑,又使得底盘整体的
一种用于无人驾驶的线控底盘系统及控制方法.pdf
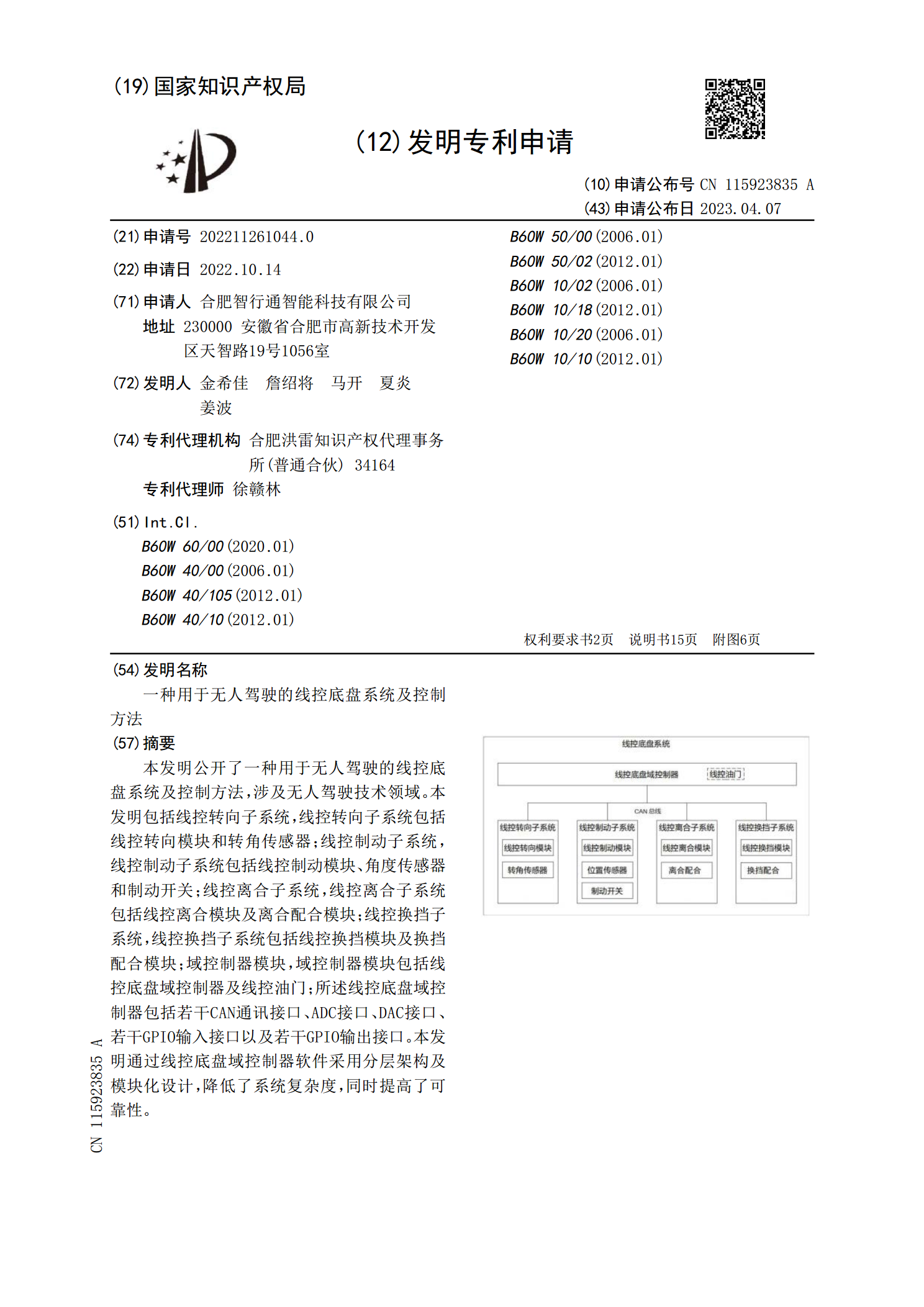
本发明公开了一种用于无人驾驶的线控底盘系统及控制方法,涉及无人驾驶技术领域。本发明包括线控转向子系统,线控转向子系统包括线控转向模块和转角传感器;线控制动子系统,线控制动子系统包括线控制动模块、角度传感器和制动开关;线控离合子系统,线控离合子系统包括线控离合模块及离合配合模块;线控换挡子系统,线控换挡子系统包括线控换挡模块及换挡配合模块;域控制器模块,域控制器模块包括线控底盘域控制器及线控油门;所述线控底盘域控制器包括若干CAN通讯接口、ADC接口、DAC接口、若干GPIO输入接口以及若干GPIO输出接口
一种应用于线控底盘测试与评价的驾驶模拟系统.pdf
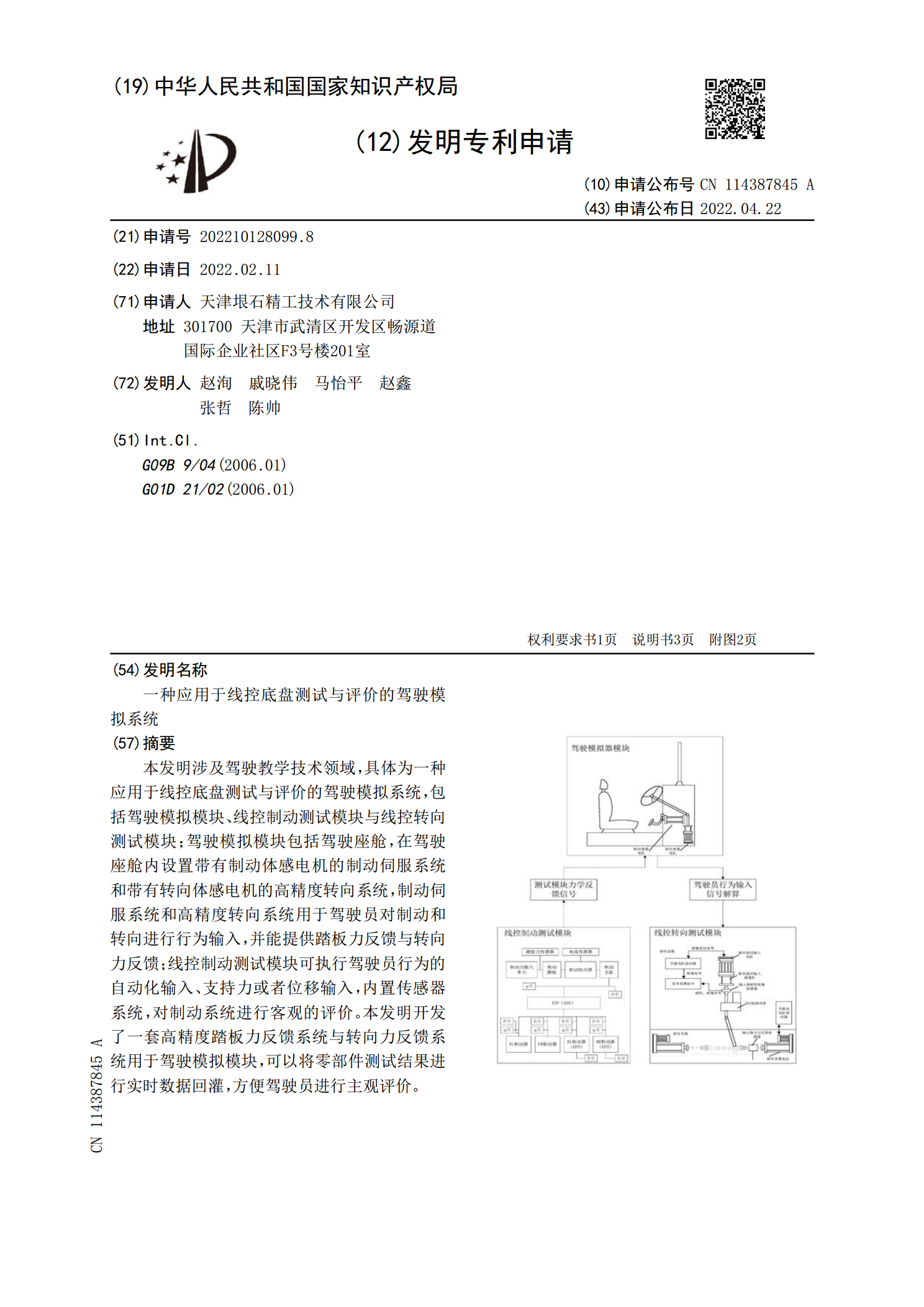
本发明涉及驾驶教学技术领域,具体为一种应用于线控底盘测试与评价的驾驶模拟系统,包括驾驶模拟模块、线控制动测试模块与线控转向测试模块;驾驶模拟模块包括驾驶座舱,在驾驶座舱内设置带有制动体感电机的制动伺服系统和带有转向体感电机的高精度转向系统,制动伺服系统和高精度转向系统用于驾驶员对制动和转向进行行为输入,并能提供踏板力反馈与转向力反馈;线控制动测试模块可执行驾驶员行为的自动化输入、支持力或者位移输入,内置传感器系统,对制动系统进行客观的评价。本发明开发了一套高精度踏板力反馈系统与转向力反馈系统用于驾驶模拟模