
一种路径跟踪的方法、装置、电子设备及存储介质.pdf

一只****呀盟


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种路径跟踪的方法、装置、电子设备及存储介质.pdf
本申请适用于车辆技术领域,提供了一种路径跟踪的方法、装置、电子设备及存储介质,方法包括:构建动力学车辆模型和车辆误差模型,并获得离散化状态方程和当前代价方程,用预期路径的各预瞄点的曲率进行增广处理获得预瞄增广状态方程及增广代价方程,并获得最优控制律的前馈增益和反馈增益,基于当前车速和第一预设条件的最优控制律的前馈增益获得预瞄点的数量,获取预期路径的各预瞄点的车辆横向误差,基于前馈增益、反馈增益、各预瞄点的车辆横向误差及各预瞄点的曲率,通过车辆的最优前轮转角计算式获得各预瞄点对应的前轮转角并控制车辆进行路径
路径跟踪方法、装置、车辆及存储介质.pdf
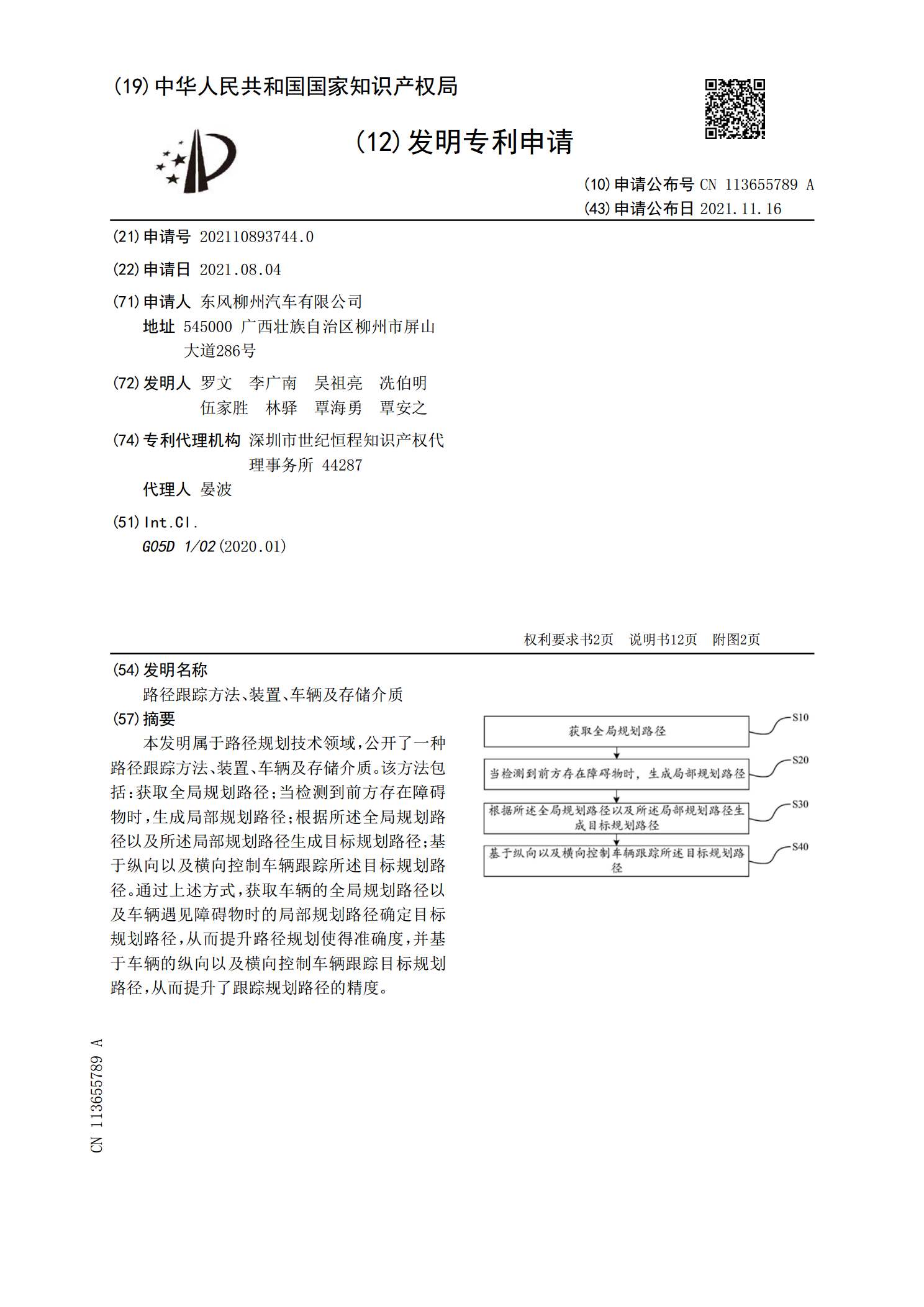
本发明属于路径规划技术领域,公开了一种路径跟踪方法、装置、车辆及存储介质。该方法包括:获取全局规划路径;当检测到前方存在障碍物时,生成局部规划路径;根据所述全局规划路径以及所述局部规划路径生成目标规划路径;基于纵向以及横向控制车辆跟踪所述目标规划路径。通过上述方式,获取车辆的全局规划路径以及车辆遇见障碍物时的局部规划路径确定目标规划路径,从而提升路径规划使得准确度,并基于车辆的纵向以及横向控制车辆跟踪目标规划路径,从而提升了跟踪规划路径的精度。

一种路径规划方法、装置、存储介质及电子设备.pdf
本发明实施例公开了一种路径规划方法、装置、存储介质及电子设备。其中方法包括:获取目标对象的当前位置,以及目标提示物的位置;若所述目标提示物不在所述目标对象的检测范围内,则获取所述目标对象的状态参数,基于所述状态参数和当前位置确定所述目标对象的辅助路径;基于所述目标对象的目标朝向确定在所述辅助路径上的临界点,其中,所述目标朝向为路径停止线上辅助点到所述目标提示物的朝向;基于所述辅助路径和所述临界点确定所述目标对象的行驶路径。以保证目标提示物进入目标对象的检测范围,可识别目标提示物的提示信息,避免在转弯过程中
一种路径规划方法、装置、存储介质及电子设备.pdf
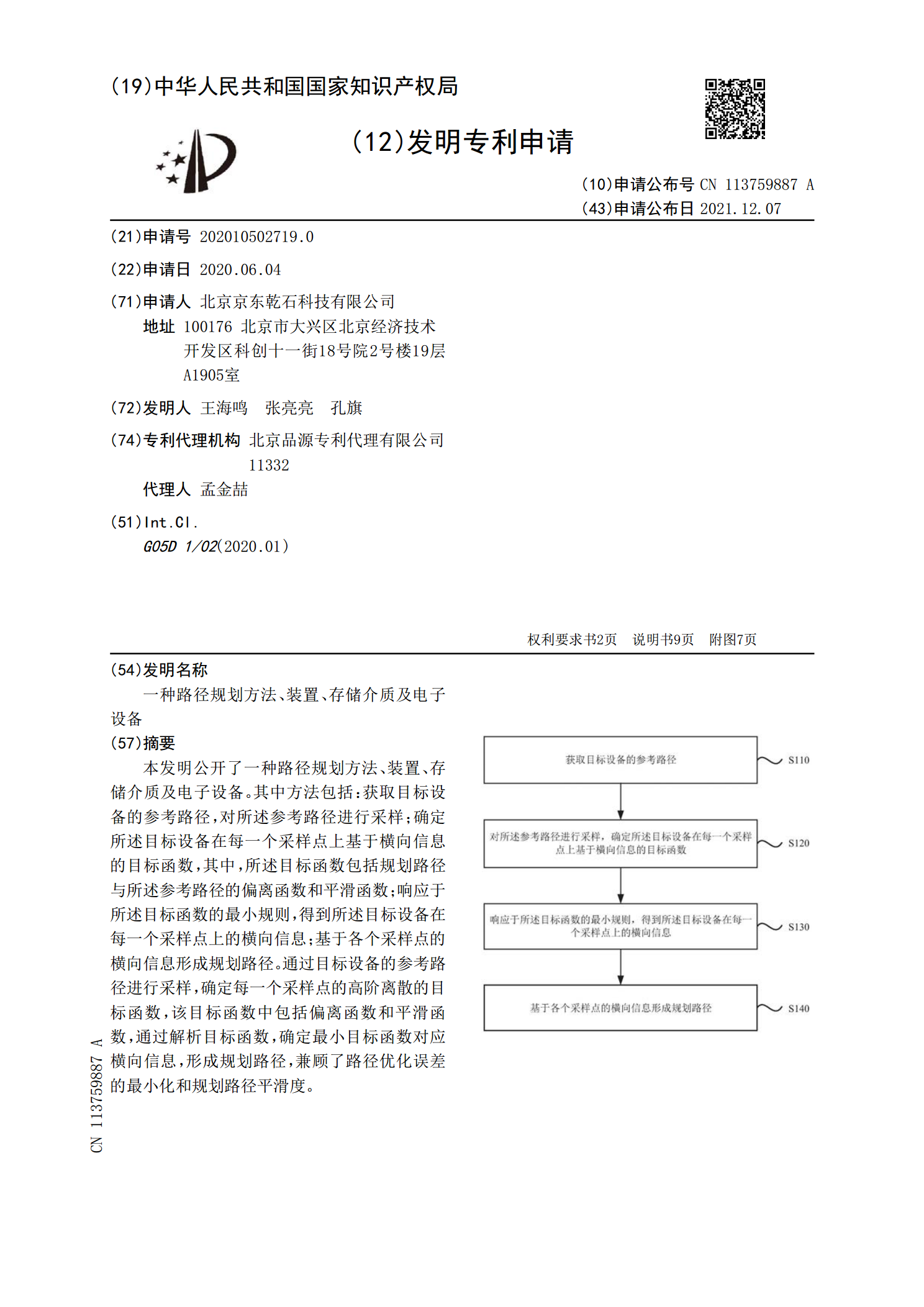
本发明公开了一种路径规划方法、装置、存储介质及电子设备。其中方法包括:获取目标设备的参考路径,对所述参考路径进行采样;确定所述目标设备在每一个采样点上基于横向信息的目标函数,其中,所述目标函数包括规划路径与所述参考路径的偏离函数和平滑函数;响应于所述目标函数的最小规则,得到所述目标设备在每一个采样点上的横向信息;基于各个采样点的横向信息形成规划路径。通过目标设备的参考路径进行采样,确定每一个采样点的高阶离散的目标函数,该目标函数中包括偏离函数和平滑函数,通过解析目标函数,确定最小目标函数对应横向信息,形成
路径确定方法、装置、电子设备及存储介质.pdf
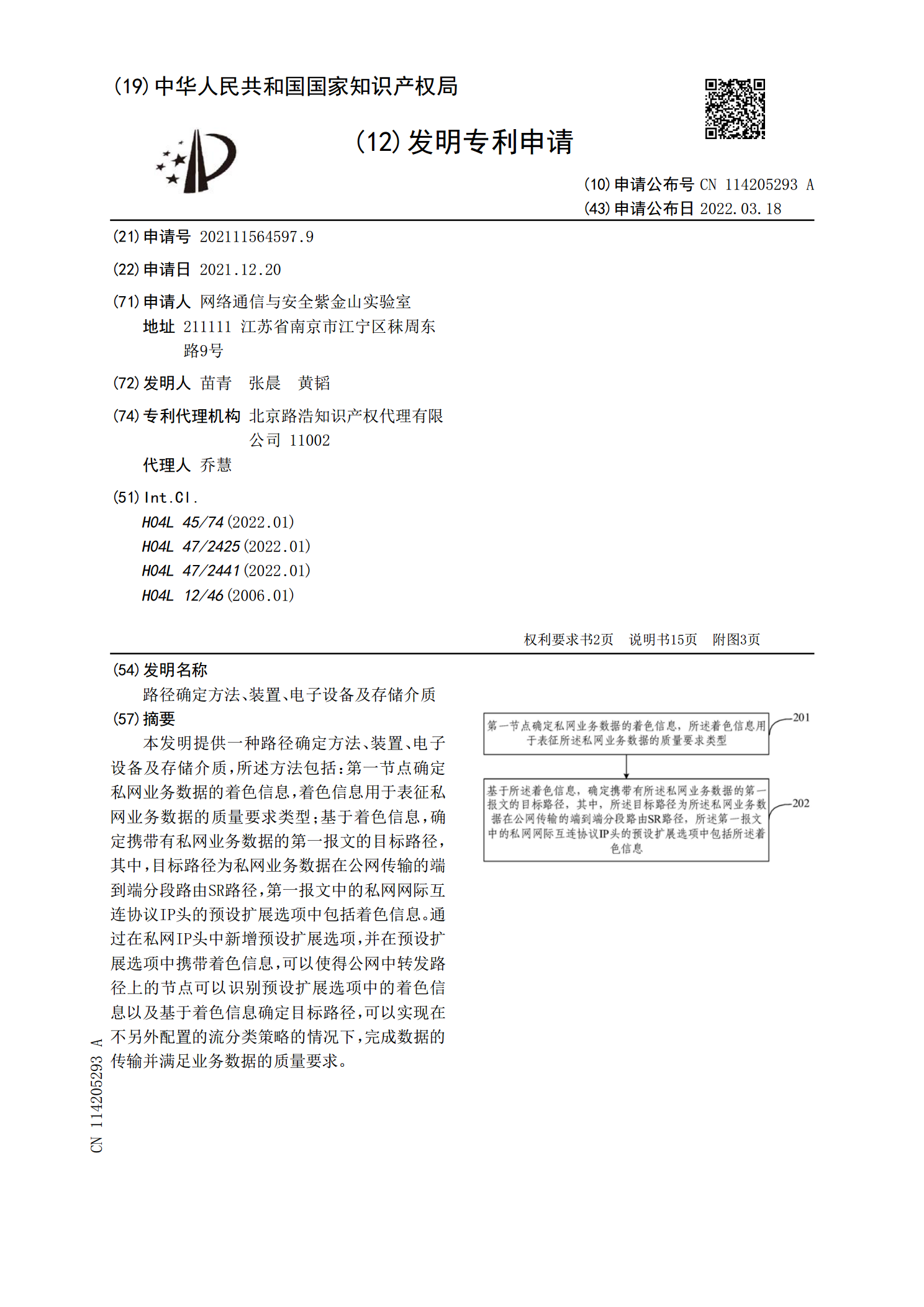
本发明提供一种路径确定方法、装置、电子设备及存储介质,所述方法包括:第一节点确定私网业务数据的着色信息,着色信息用于表征私网业务数据的质量要求类型;基于着色信息,确定携带有私网业务数据的第一报文的目标路径,其中,目标路径为私网业务数据在公网传输的端到端分段路由SR路径,第一报文中的私网网际互连协议IP头的预设扩展选项中包括着色信息。通过在私网IP头中新增预设扩展选项,并在预设扩展选项中携带着色信息,可以使得公网中转发路径上的节点可以识别预设扩展选项中的着色信息以及基于着色信息确定目标路径,可以实现在不另外