
一种可变结构的地空两用机器人.pdf

是你****晨呀

1/9
2/9

3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可变结构的地空两用机器人.pdf
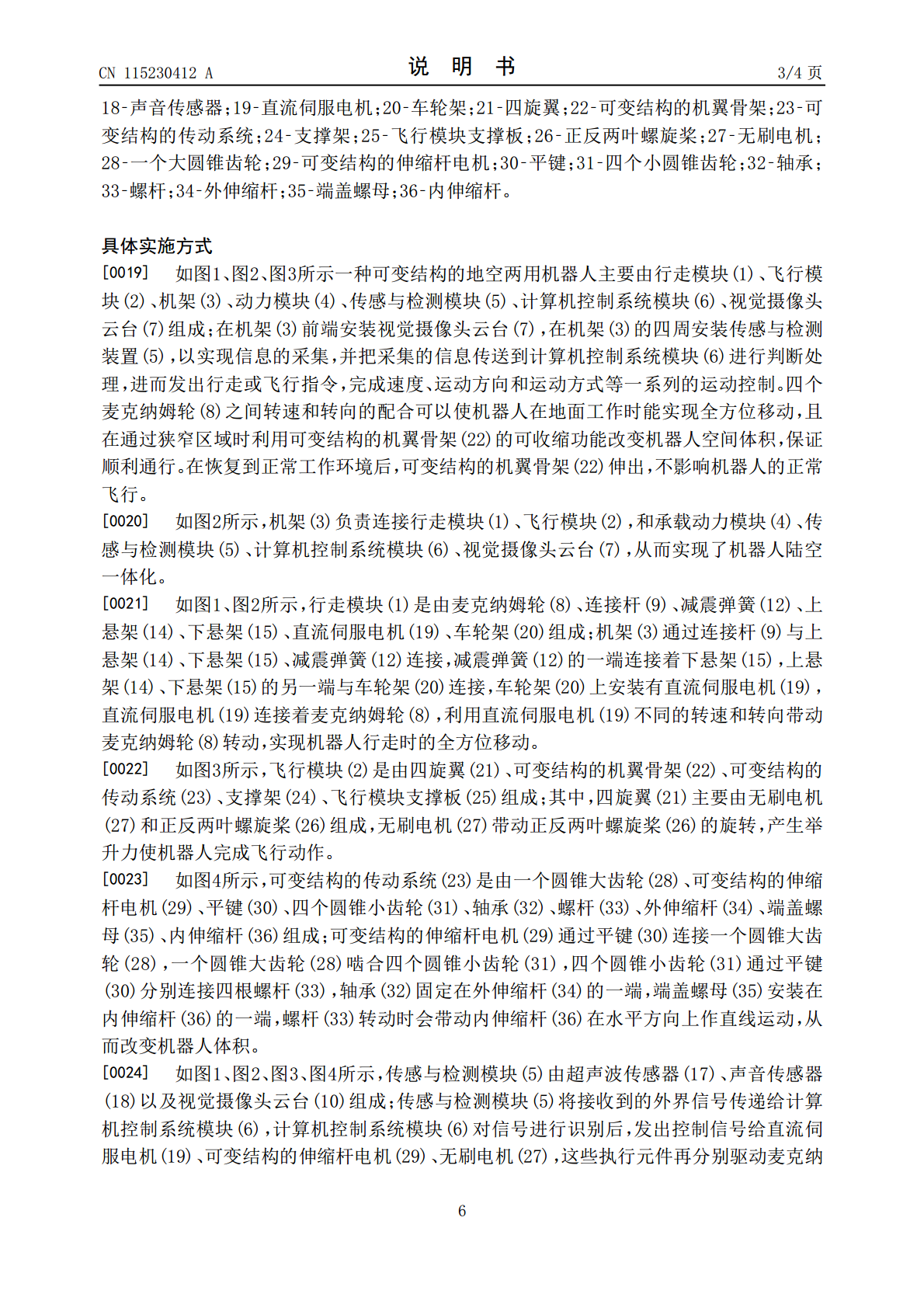
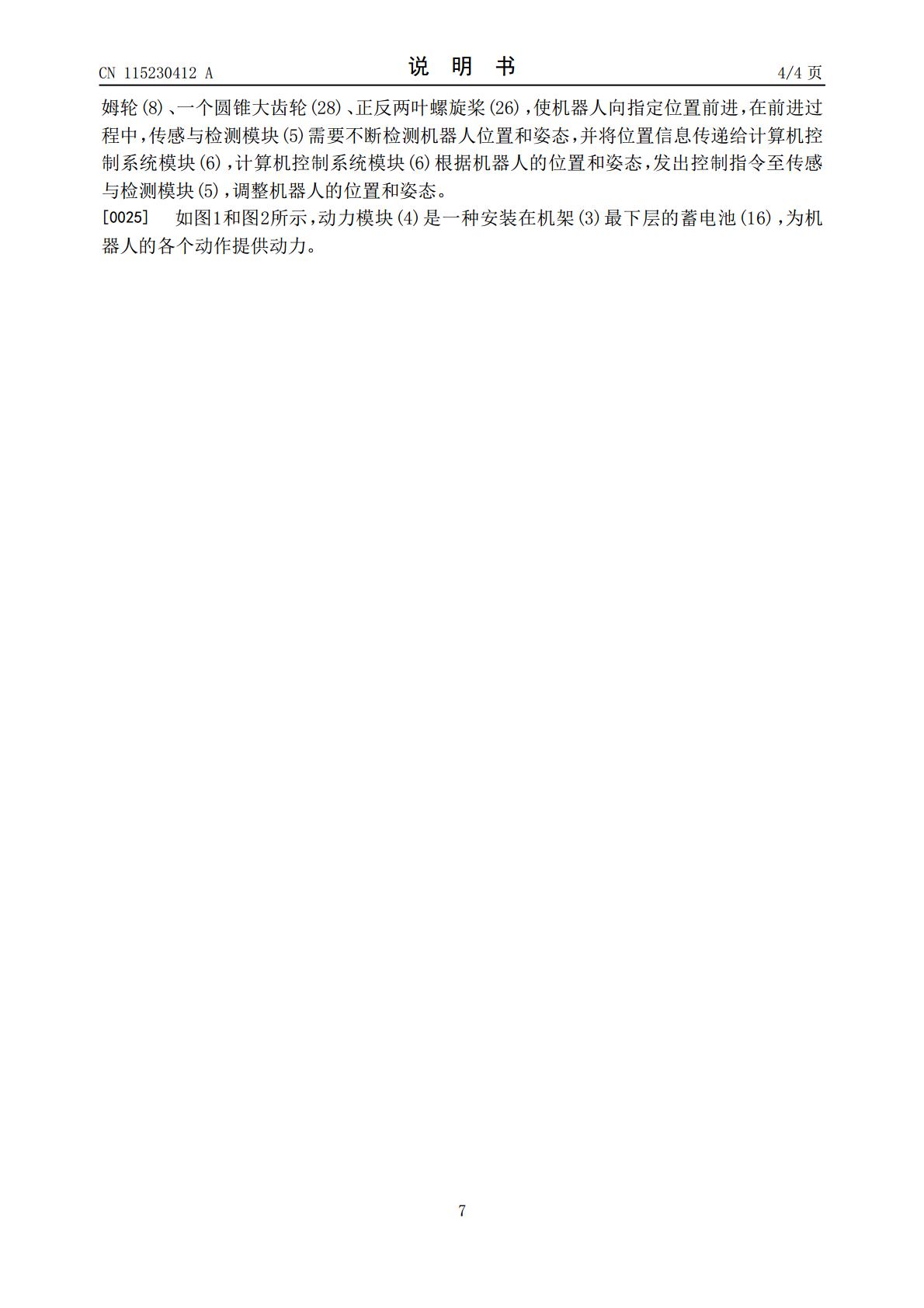
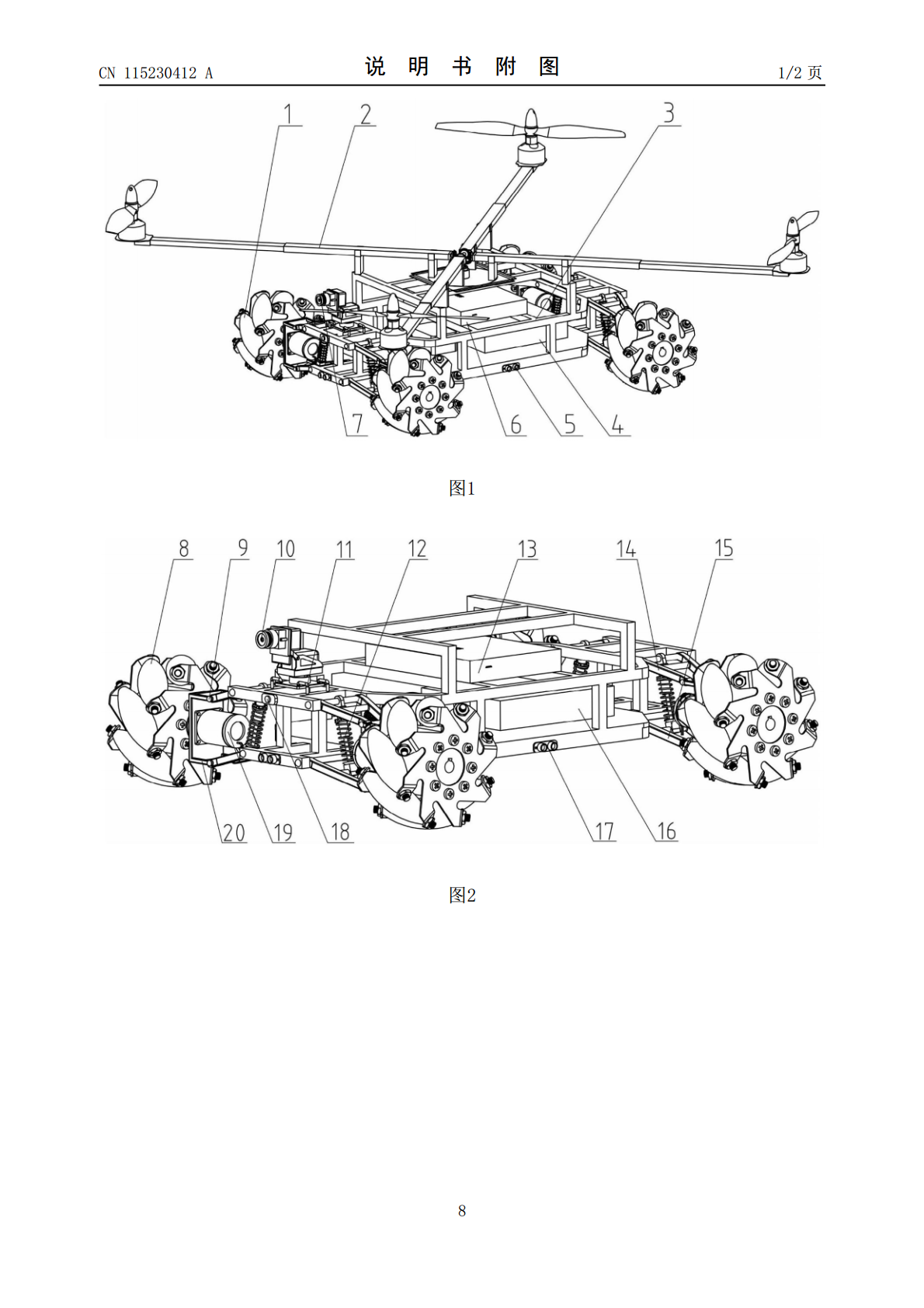
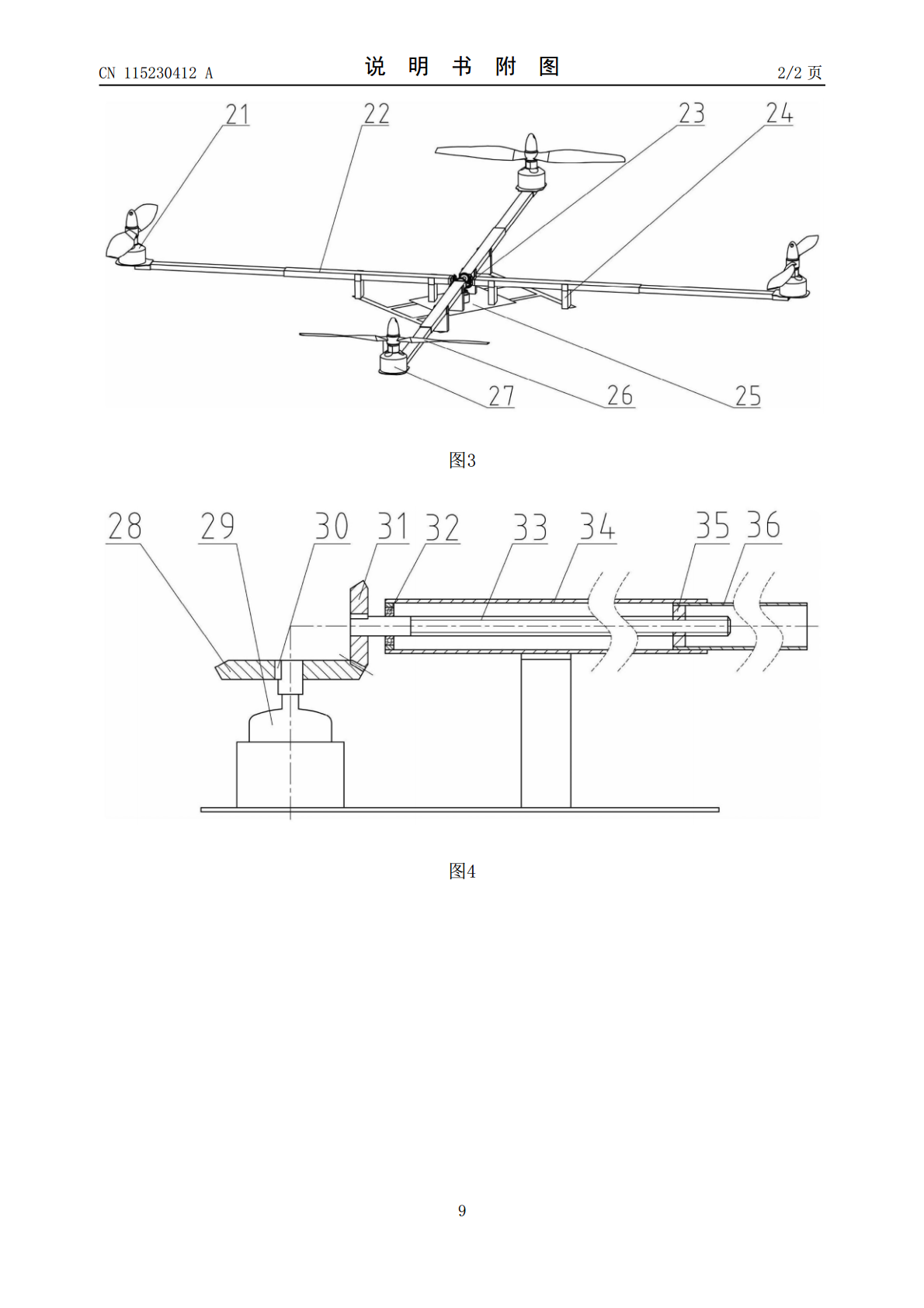
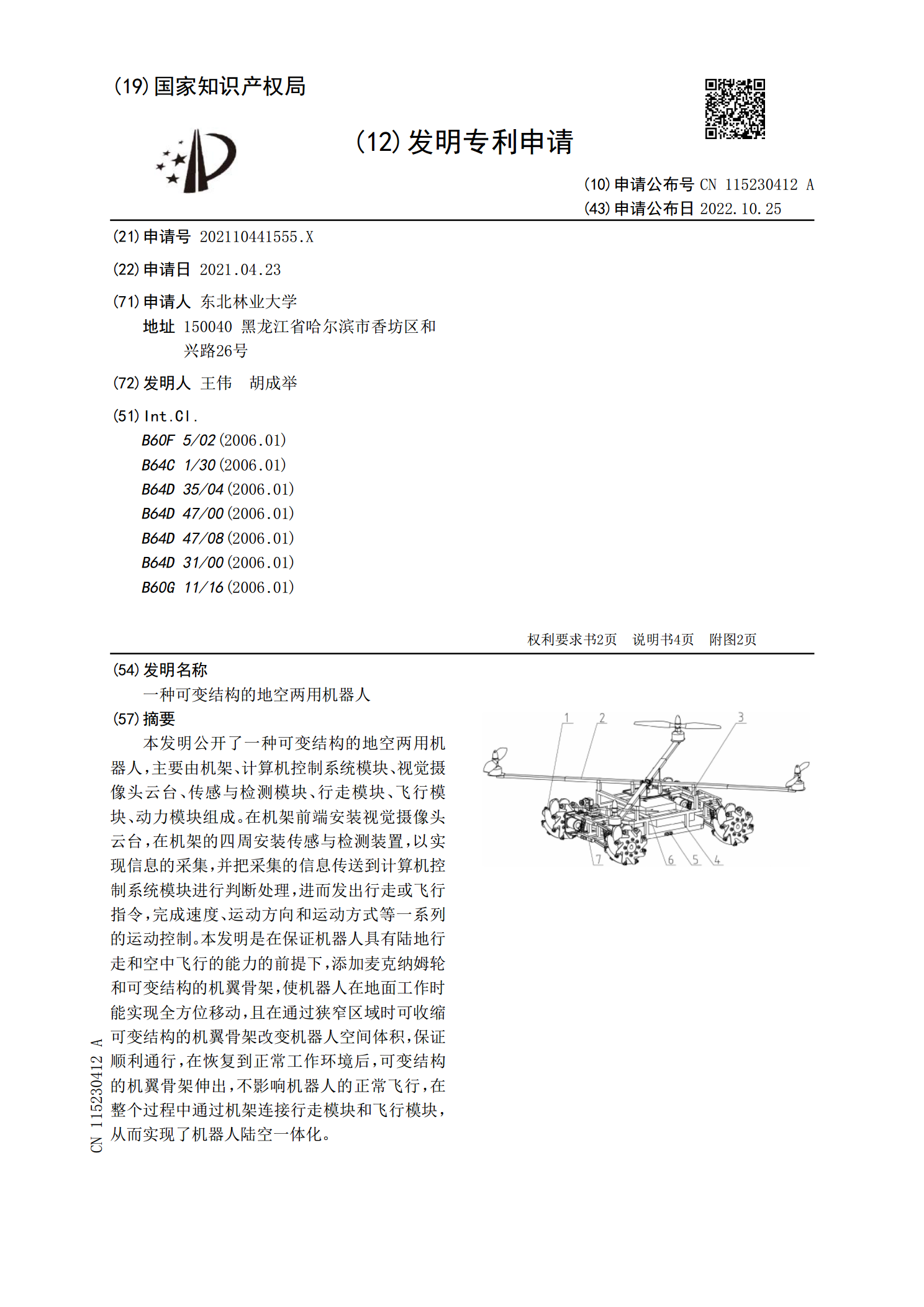
本发明公开了一种可变结构的地空两用机器人,主要由机架、计算机控制系统模块、视觉摄像头云台、传感与检测模块、行走模块、飞行模块、动力模块组成。在机架前端安装视觉摄像头云台,在机架的四周安装传感与检测装置,以实现信息的采集,并把采集的信息传送到计算机控制系统模块进行判断处理,进而发出行走或飞行指令,完成速度、运动方向和运动方式等一系列的运动控制。本发明是在保证机器人具有陆地行走和空中飞行的能力的前提下,添加麦克纳姆轮和可变结构的机翼骨架,使机器人在地面工作时能实现全方位移动,且在通过狭窄区域时可收缩可变结构的

地空两用农业信息采集机器人设计研究.pptx
地空两用农业信息采集机器人设计研究目录添加章节标题地空两用农业信息采集机器人概述定义与功能国内外研究现状研究目的与意义地空两用农业信息采集机器人总体设计总体结构设计硬件选型与配置软件系统设计信息采集与处理方案地空两用农业信息采集机器人关键技术实现飞行控制系统设计地面移动系统设计传感器集成与数据处理通信与遥控技术地空两用农业信息采集机器人实验与分析实验方案设计与实施实验数据分析与处理结果对比与性能评估优缺点分析及改进方向地空两用农业信息采集机器人应用前景与展望农业信息化发展需求技术创新与突破方向市场推广与应

地空两用农业信息采集机器人设计研究.docx
地空两用农业信息采集机器人设计研究地空两用农业信息采集机器人设计研究摘要:本论文主要研究了地空两用农业信息采集机器人的设计。根据农业领域的需求和技术发展趋势,初步确定了机器人的功能需求。然后,从机器人的机械设计、电子设计和软件设计三个方面进行了详细探讨,提出了具体的设计方案。最后,通过数学模型的仿真测试和实验验证,证明了设计方案的可行性和有效性。研究结果表明,地空两用农业信息采集机器人具有一定的应用潜力和价值。关键词:农业机器人、信息采集、设计、仿真、验证1.引言随着社会经济的不断发展和技术的不断进步,农
一种陆空两用轮式机器人.pdf
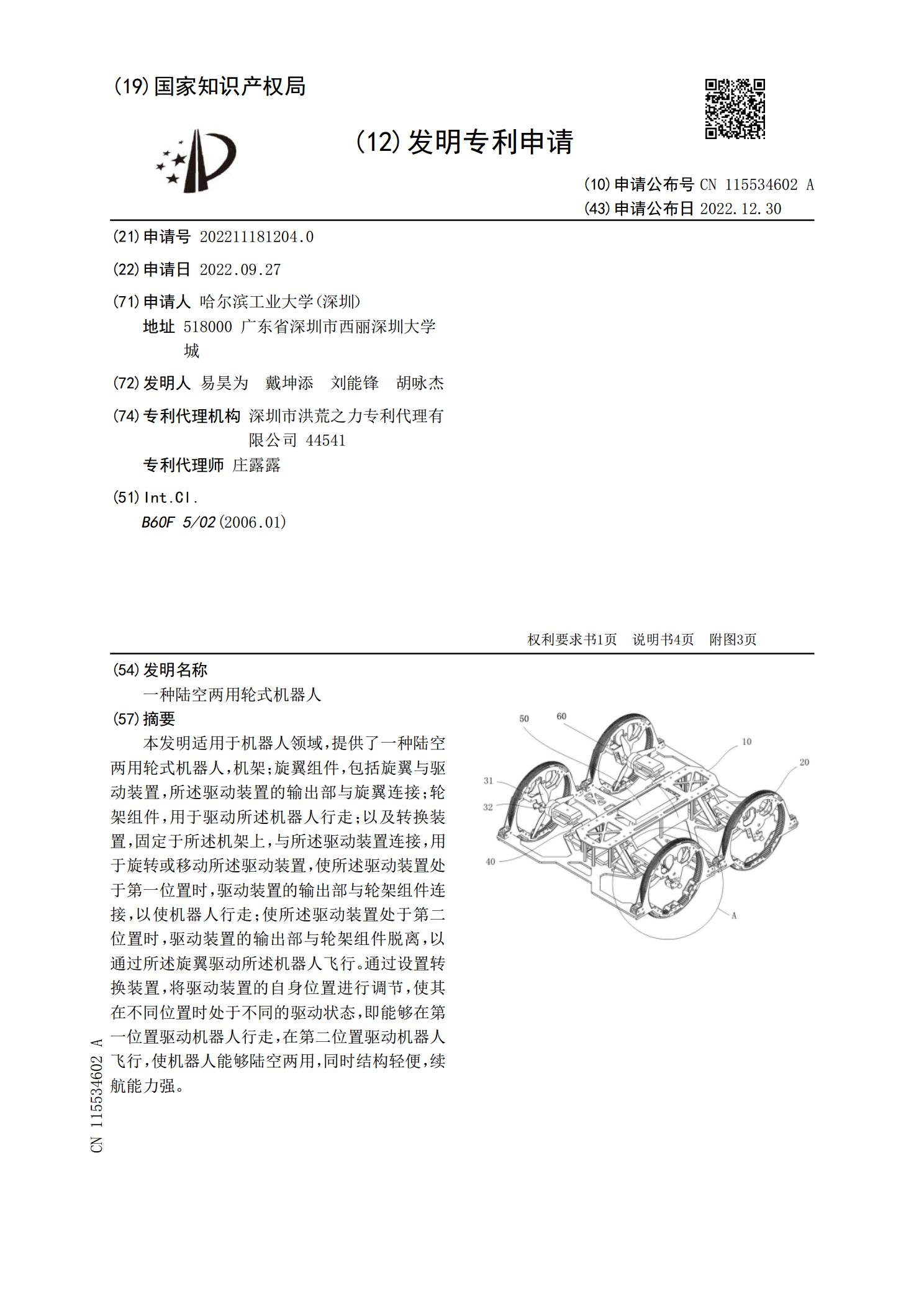
本发明适用于机器人领域,提供了一种陆空两用轮式机器人,机架;旋翼组件,包括旋翼与驱动装置,所述驱动装置的输出部与旋翼连接;轮架组件,用于驱动所述机器人行走;以及转换装置,固定于所述机架上,与所述驱动装置连接,用于旋转或移动所述驱动装置,使所述驱动装置处于第一位置时,驱动装置的输出部与轮架组件连接,以使机器人行走;使所述驱动装置处于第二位置时,驱动装置的输出部与轮架组件脱离,以通过所述旋翼驱动所述机器人飞行。通过设置转换装置,将驱动装置的自身位置进行调节,使其在不同位置时处于不同的驱动状态,即能够在第一位置
一种陆空两用机器人.pdf
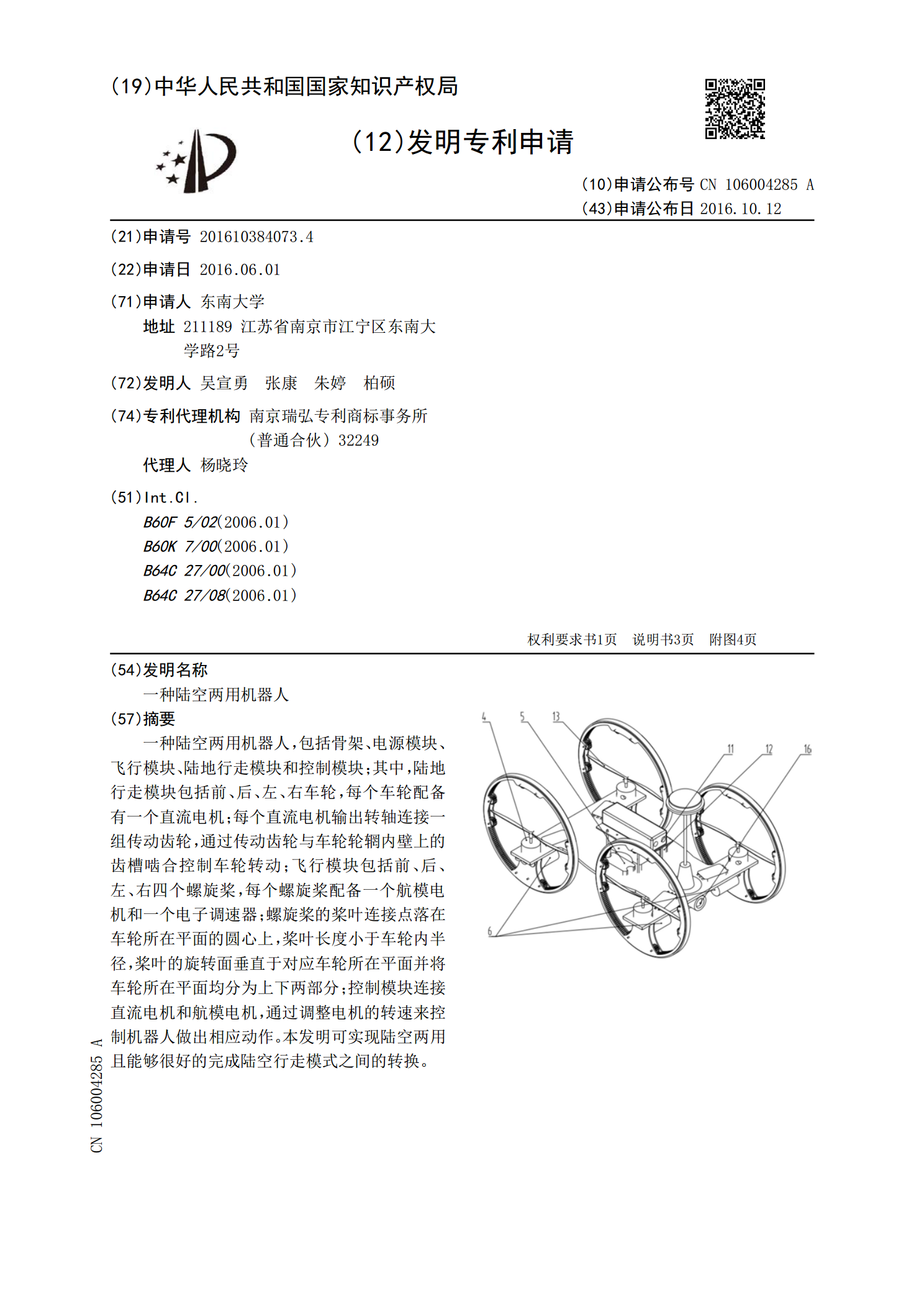
一种陆空两用机器人,包括骨架、电源模块、飞行模块、陆地行走模块和控制模块;其中,陆地行走模块包括前、后、左、右车轮,每个车轮配备有一个直流电机;每个直流电机输出转轴连接一组传动齿轮,通过传动齿轮与车轮轮辋内壁上的齿槽啮合控制车轮转动;飞行模块包括前、后、左、右四个螺旋桨,每个螺旋桨配备一个航模电机和一个电子调速器;螺旋桨的桨叶连接点落在车轮所在平面的圆心上,桨叶长度小于车轮内半径,桨叶的旋转面垂直于对应车轮所在平面并将车轮所在平面均分为上下两部分;控制模块连接直流电机和航模电机,通过调整电机的转速来控制机