
一种陆空两用轮式机器人.pdf

Ch****49

1/9
2/9
3/9

4/9

5/9

6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种陆空两用轮式机器人.pdf
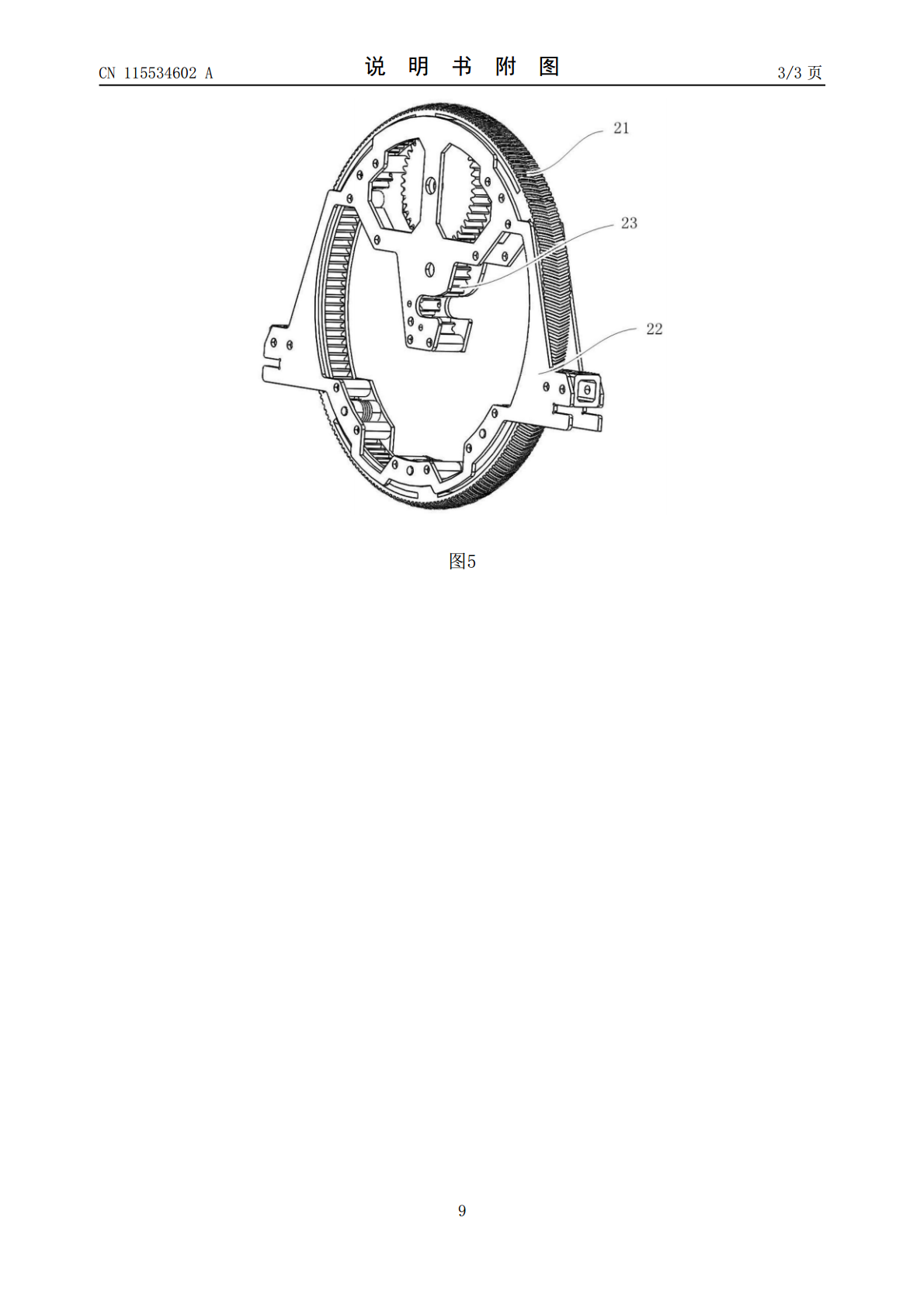
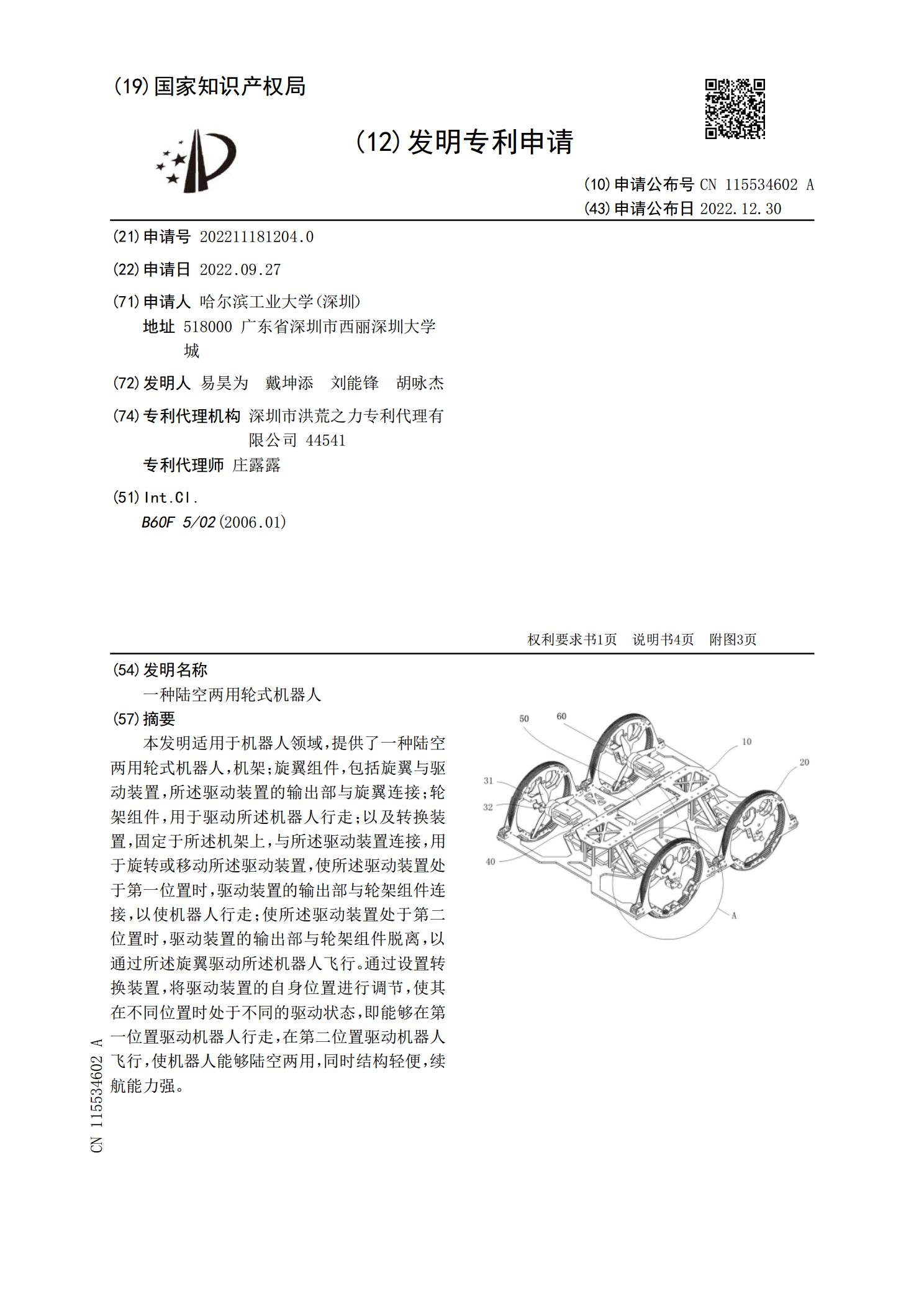
本发明适用于机器人领域,提供了一种陆空两用轮式机器人,机架;旋翼组件,包括旋翼与驱动装置,所述驱动装置的输出部与旋翼连接;轮架组件,用于驱动所述机器人行走;以及转换装置,固定于所述机架上,与所述驱动装置连接,用于旋转或移动所述驱动装置,使所述驱动装置处于第一位置时,驱动装置的输出部与轮架组件连接,以使机器人行走;使所述驱动装置处于第二位置时,驱动装置的输出部与轮架组件脱离,以通过所述旋翼驱动所述机器人飞行。通过设置转换装置,将驱动装置的自身位置进行调节,使其在不同位置时处于不同的驱动状态,即能够在第一位置
一种陆空两用机器人.pdf
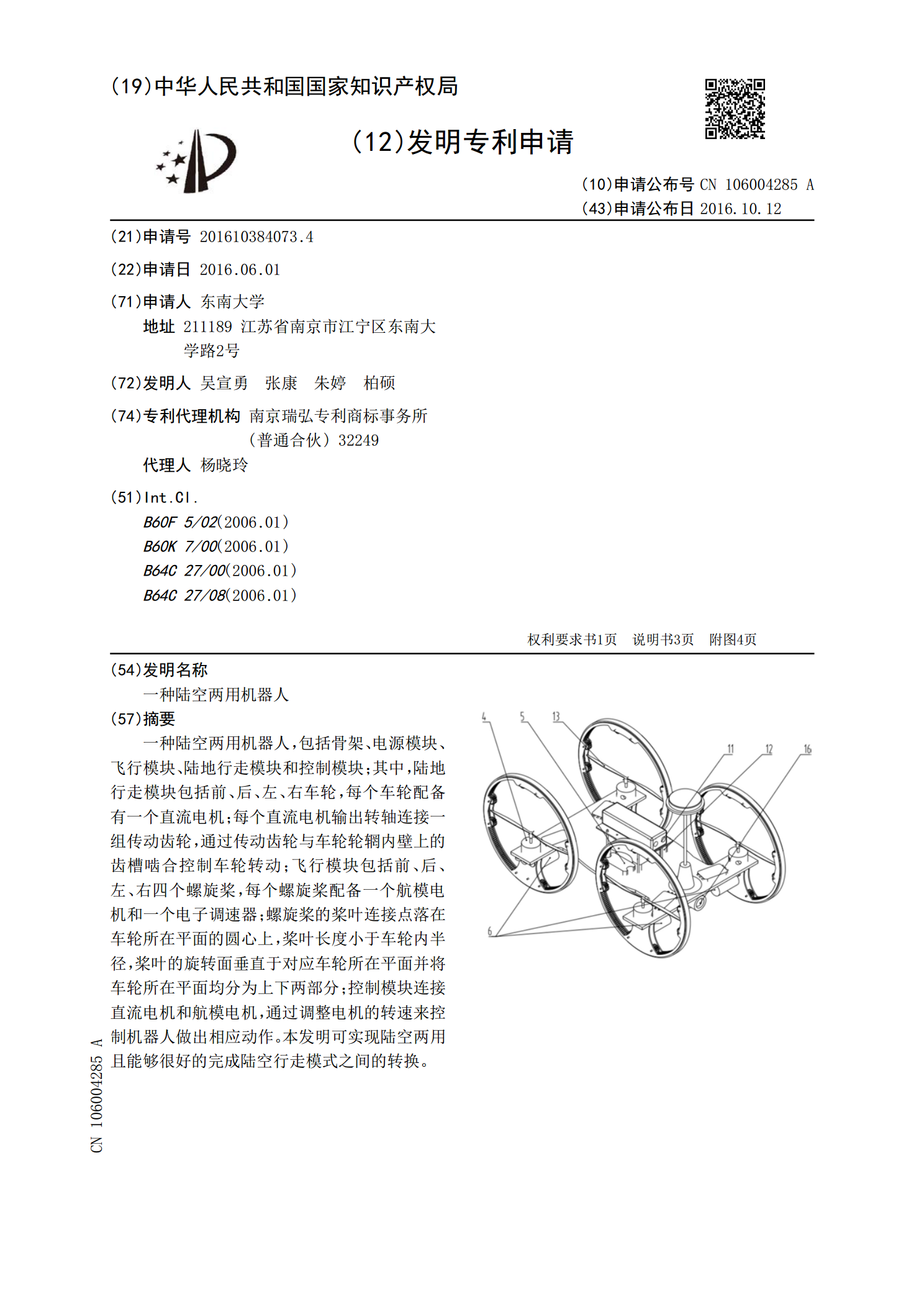
一种陆空两用机器人,包括骨架、电源模块、飞行模块、陆地行走模块和控制模块;其中,陆地行走模块包括前、后、左、右车轮,每个车轮配备有一个直流电机;每个直流电机输出转轴连接一组传动齿轮,通过传动齿轮与车轮轮辋内壁上的齿槽啮合控制车轮转动;飞行模块包括前、后、左、右四个螺旋桨,每个螺旋桨配备一个航模电机和一个电子调速器;螺旋桨的桨叶连接点落在车轮所在平面的圆心上,桨叶长度小于车轮内半径,桨叶的旋转面垂直于对应车轮所在平面并将车轮所在平面均分为上下两部分;控制模块连接直流电机和航模电机,通过调整电机的转速来控制机
一种陆空两用球形机器人.pdf
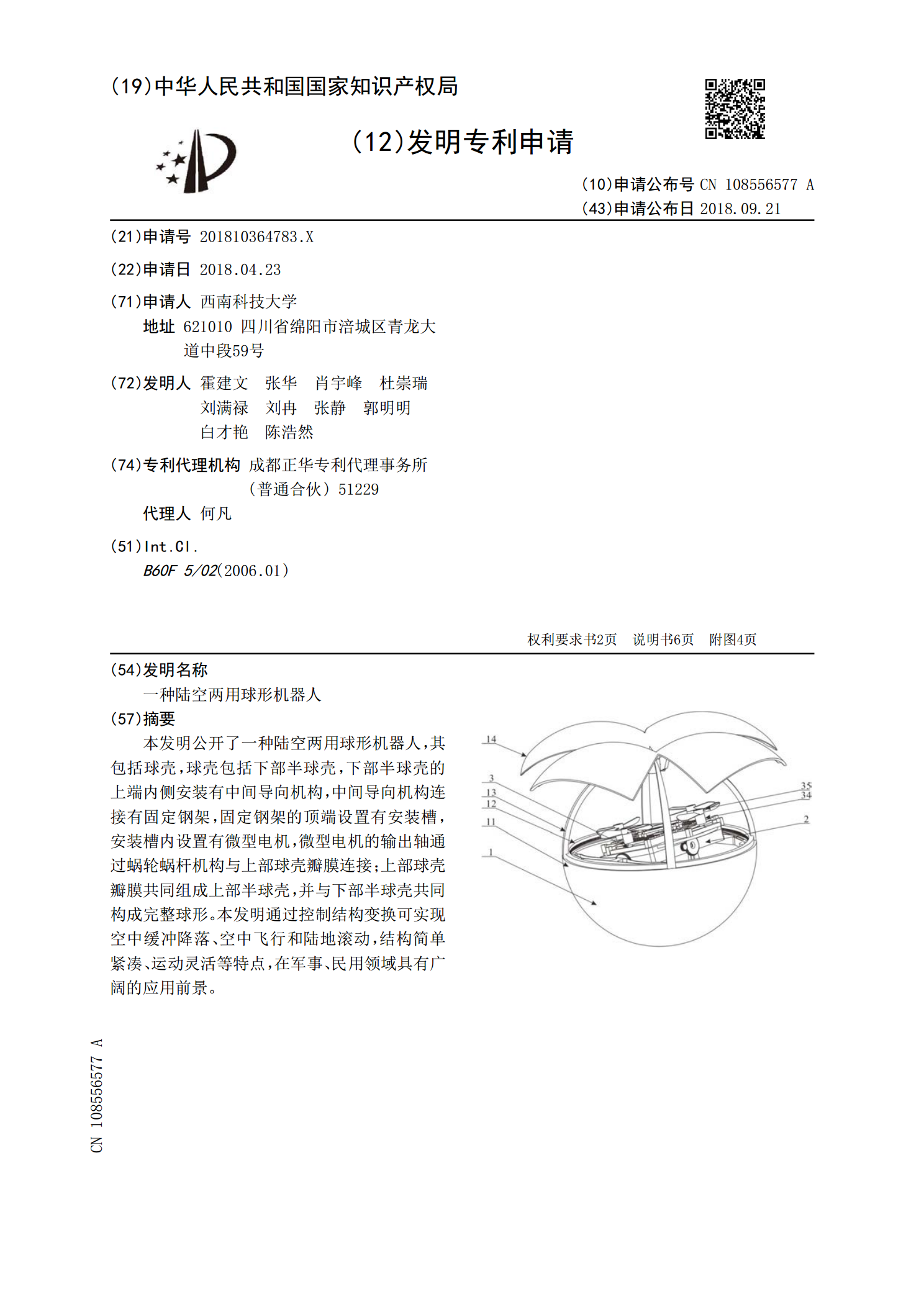
本发明公开了一种陆空两用球形机器人,其包括球壳,球壳包括下部半球壳,下部半球壳的上端内侧安装有中间导向机构,中间导向机构连接有固定钢架,固定钢架的顶端设置有安装槽,安装槽内设置有微型电机,微型电机的输出轴通过蜗轮蜗杆机构与上部球壳瓣膜连接;上部球壳瓣膜共同组成上部半球壳,并与下部半球壳共同构成完整球形。本发明通过控制结构变换可实现空中缓冲降落、空中飞行和陆地滚动,结构简单紧凑、运动灵活等特点,在军事、民用领域具有广阔的应用前景。

一种陆空两用扫雷机器人.pdf
本发明公开一种陆空两用扫雷机器人,在防爆箱的四面安装有太阳能电池集成门;所述太阳能电池集成门安装有门轴;所述太阳能电池集成门与所述防爆箱之间通过液压推动杆驱动进行所述太阳能电池集成门的开关;所述防爆箱上面两边中间安装有螺旋桨;所述螺旋桨安装在无刷电机上;所述防爆箱上面的正中间安装有全景双目摄像头;所述防爆箱两侧安装有机械臂;所述防爆箱内安装有主控制器和蓄电池;所述防爆箱底部四角安装有电机驱动轮;所述防爆箱底部中间安装有超声波传感器;本发明采用陆空两用无人排雷技术省时省力,减少了工作人员的安全隐患。

一种三旋翼轮式水陆空三栖机器人.pdf
本发明公开了一种三旋翼轮式水陆空三栖机器人。该机器人包括旋转翼组件、驱动轮组件、本体、调节翼组件、调压组件、万向轮、控制系统及传感器;所述旋转翼组件、调节翼组件均安装在本体上;驱动轮组件安装在本体左右两侧;调压组件安装在本体底部,通过控制本体体积的变化调节浮力大小;万向轮设置在本体末端;所述控制系统及各种传感器安装在本体上,用于多栖机器人的环境采集及控制;地面模式时三旋翼的两个旋翼自动折叠,另一个旋翼通过变结构提供地面辅助牵引力;水中模式时通过调压组件和其中两个旋翼控制潜水深度;空中模式时通过三个旋翼和两