
地空两用农业信息采集机器人设计研究.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

地空两用农业信息采集机器人设计研究.docx
地空两用农业信息采集机器人设计研究地空两用农业信息采集机器人设计研究摘要:本论文主要研究了地空两用农业信息采集机器人的设计。根据农业领域的需求和技术发展趋势,初步确定了机器人的功能需求。然后,从机器人的机械设计、电子设计和软件设计三个方面进行了详细探讨,提出了具体的设计方案。最后,通过数学模型的仿真测试和实验验证,证明了设计方案的可行性和有效性。研究结果表明,地空两用农业信息采集机器人具有一定的应用潜力和价值。关键词:农业机器人、信息采集、设计、仿真、验证1.引言随着社会经济的不断发展和技术的不断进步,农

地空两用农业信息采集机器人设计研究.pptx
地空两用农业信息采集机器人设计研究目录添加章节标题地空两用农业信息采集机器人概述定义与功能国内外研究现状研究目的与意义地空两用农业信息采集机器人总体设计总体结构设计硬件选型与配置软件系统设计信息采集与处理方案地空两用农业信息采集机器人关键技术实现飞行控制系统设计地面移动系统设计传感器集成与数据处理通信与遥控技术地空两用农业信息采集机器人实验与分析实验方案设计与实施实验数据分析与处理结果对比与性能评估优缺点分析及改进方向地空两用农业信息采集机器人应用前景与展望农业信息化发展需求技术创新与突破方向市场推广与应

地空两用农业信息采集机器人设计与研究的开题报告.docx
地空两用农业信息采集机器人设计与研究的开题报告开题报告题目:地空两用农业信息采集机器人设计与研究研究背景和意义随着农业现代化的深入推进,现代化的农业装备也越来越普及。针对农业机器人的研究越来越受到广泛关注。农业机器人可以利用自己内置的传感器技术、计算机视觉技术和其他智能技术,更加专业、高效、精准地为农业生产提供帮助。采集数据和信息、预测天气趋势、监测地块作物生长状态、制定智能化的喷雾方案等,大大提高了农业生产效益和农业机械化程度。随着人口的增加和生活质量的提高,食品的生产和供应也受到了人们的高度关注。农业

地空两用农业信息采集机器人研究—基于STM32微控制器.docx
地空两用农业信息采集机器人研究—基于STM32微控制器摘要地空两用农业信息采集机器人是一种用于农业信息采集的智能机器人。本文基于STM32微控制器,研究了机器人的硬件设计和软件开发,并进行了实际测试。机器人可以通过无人机和地面车辆两种方式进行信息采集,包括农作物生长情况、土壤湿度、气温等数据。实验结果表明,机器人的性能良好,能够满足实际农业生产中的需求。关键词:地空两用;农业信息采集;STM32;机器人引言随着农业生产的现代化和信息化程度的不断提高,农业信息的采集和处理越来越受到农民和农业专家的关注。传统
一种可变结构的地空两用机器人.pdf
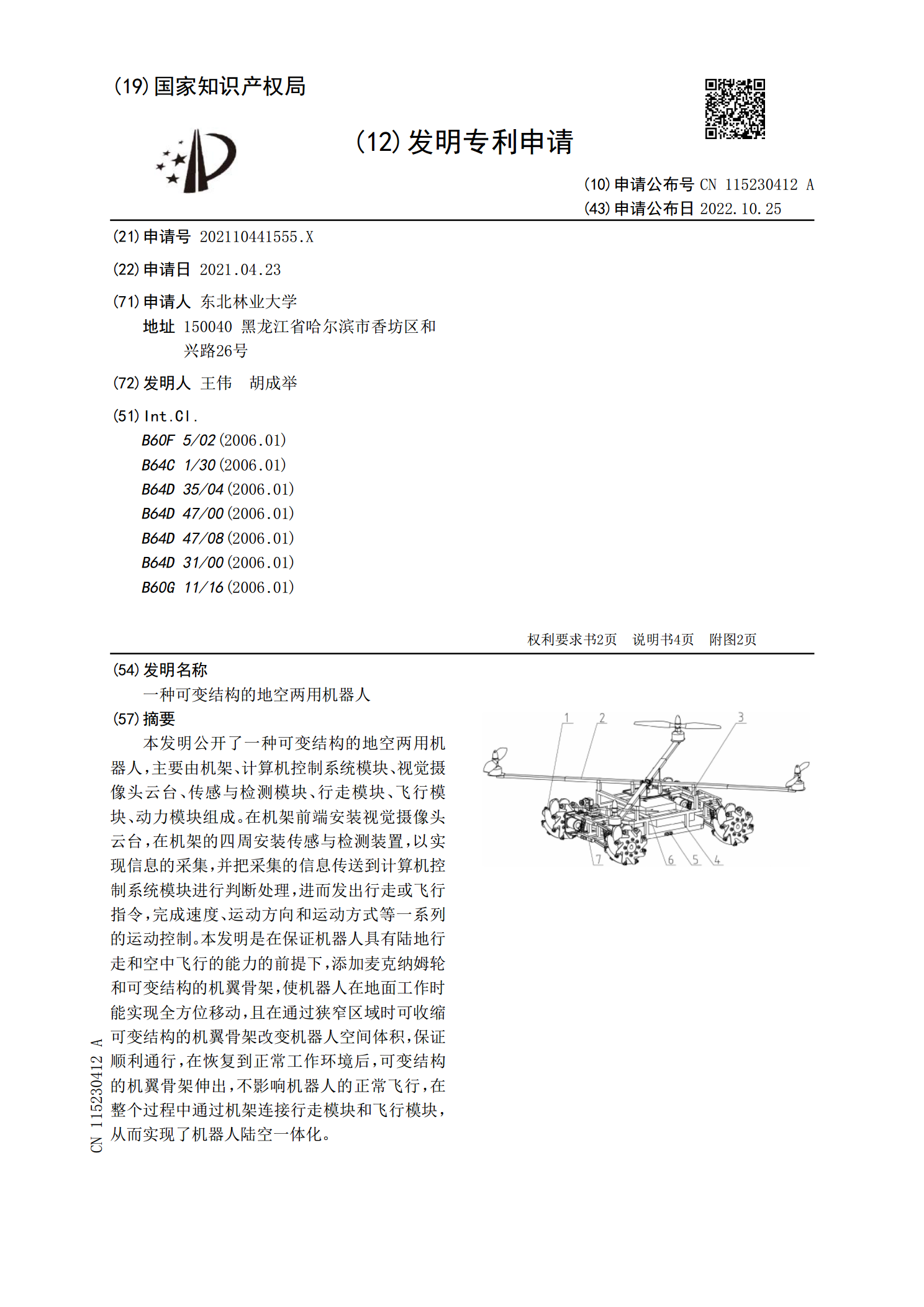
本发明公开了一种可变结构的地空两用机器人,主要由机架、计算机控制系统模块、视觉摄像头云台、传感与检测模块、行走模块、飞行模块、动力模块组成。在机架前端安装视觉摄像头云台,在机架的四周安装传感与检测装置,以实现信息的采集,并把采集的信息传送到计算机控制系统模块进行判断处理,进而发出行走或飞行指令,完成速度、运动方向和运动方式等一系列的运动控制。本发明是在保证机器人具有陆地行走和空中飞行的能力的前提下,添加麦克纳姆轮和可变结构的机翼骨架,使机器人在地面工作时能实现全方位移动,且在通过狭窄区域时可收缩可变结构的