
一种筒体内表面图像采集装置及缺陷检测方法.pdf

永香****能手


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种筒体内表面图像采集装置及缺陷检测方法.pdf
本发明提供一种筒体内表面图像采集装置,检测台前端安装有对齐组件,所述对齐组件包括齿条,检测台上横向布设有滑轨;电机安装座一侧安装有传动齿轮,传动齿轮与齿条啮合;驱动装置安装在滑轨上,驱动装置上安装有悬臂杆,所述悬臂杆上安装有计数组件,所述计数组件上安装有用于采集筒体内表面图像的相机单元,计数组件包括计数器,通过计数器计算相机单元旋转圈数;托盘组件位于悬臂杆一侧,托盘组件上承载有待测筒体,待测筒体一侧安装在固定卡盘上,固定卡盘与安装在检测台上的主轴箱连接,且主轴箱位于滑轨一侧。

表面缺陷检测装置及表面缺陷检测方法.pdf
一种表面缺陷检测装置及表面缺陷检测方法。对于钢材的表面的检查对象部位,从彼此向相反侧倾斜的方向以大致相同的入射角度,分别照射能够区分的第1及第2照明光,并分别拍摄被第1照明光照明的检查对象部位的第1图像及被第2照明光照明的检查对象部位的第2图像。生成该第1图像与第2图像的差分图像,并从差分图像的亮部及暗部中,基于沿着与第1或第2照明光的照射方向对应的规定方向的亮部及暗部的序列,将检查对象部位中的凸状部的亮部及暗部的组合去除,再基于该去除处理后留下的亮部及暗部的形状特征量或沿着规定方向的序列,来判定检查对象
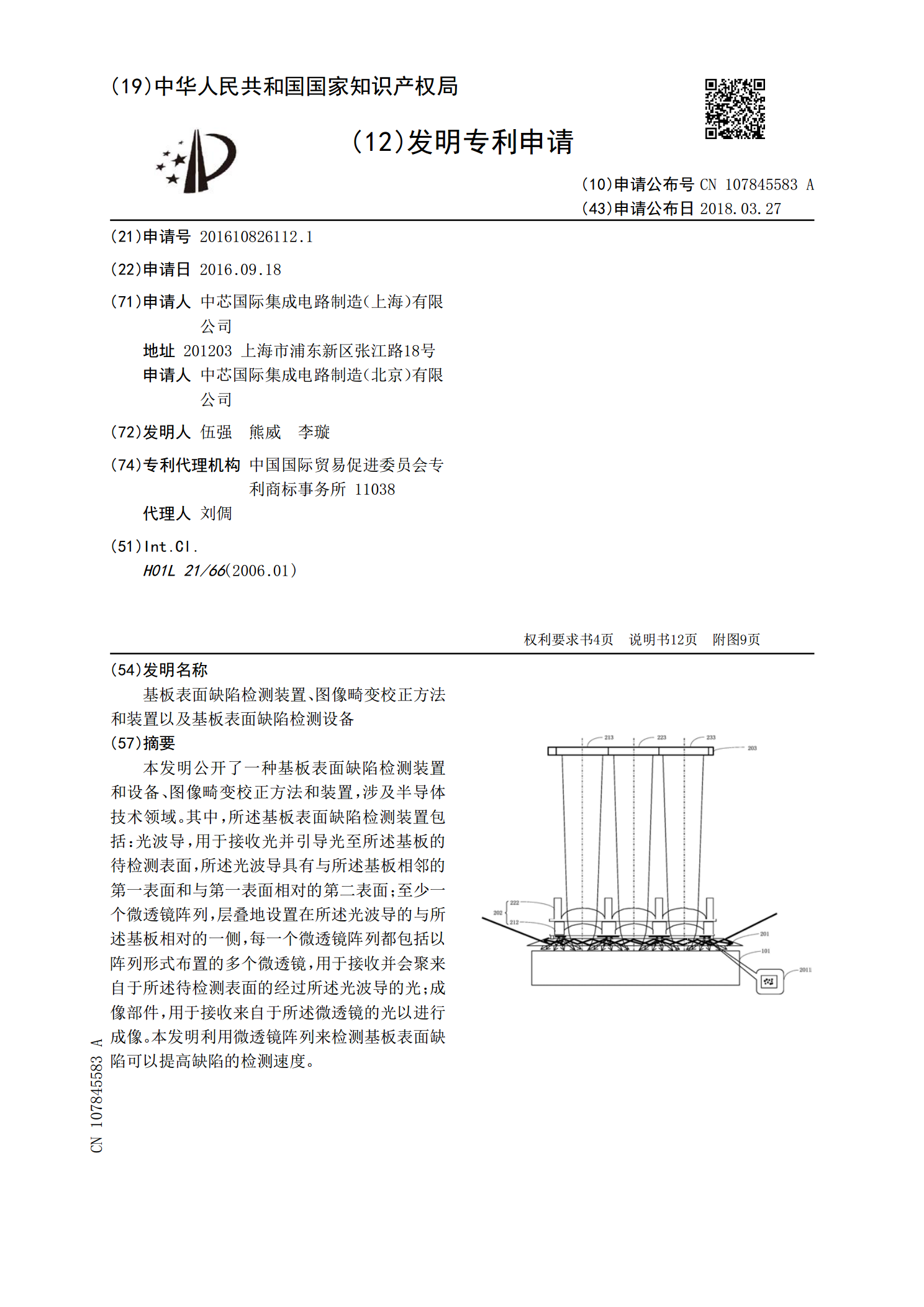
基板表面缺陷检测装置、图像畸变校正方法和装置以及基板表面缺陷检测设备.pdf
本发明公开了一种基板表面缺陷检测装置和设备、图像畸变校正方法和装置,涉及半导体技术领域。其中,所述基板表面缺陷检测装置包括:光波导,用于接收光并引导光至所述基板的待检测表面,所述光波导具有与所述基板相邻的第一表面和与第一表面相对的第二表面;至少一个微透镜阵列,层叠地设置在所述光波导的与所述基板相对的一侧,每一个微透镜阵列都包括以阵列形式布置的多个微透镜,用于接收并会聚来自于所述待检测表面的经过所述光波导的光;成像部件,用于接收来自于所述微透镜的光以进行成像。本发明利用微透镜阵列来检测基板表面缺陷可以提高缺

一种用于缺陷识别的带钢表面图像采集装置及其使用方法.pdf
本发明属于带钢表面检测技术领域,具体涉及一种用于缺陷识别的带钢表面图像采集装置及其使用方法,包括压辊组一、压辊组二、压辊组三,压辊组一、压辊组二、压辊组三滚动连接有带钢,带钢上侧安装的张紧度稳定机构包括支腿一、固定板、导杆、滑杆、行程开关、限位板、移动板、弹簧一、固定座、张紧辊、外罩板和光敏传感器,带钢下方安装有反射机构和拍摄机构,拍摄机构包括支腿三、外壳体、电机、驱动齿轮、从动齿轮、齿条、摄像机、拍摄口、保护盖板、连接销一、弹簧二、连接销二,张紧辊可使带钢的张紧度稳定在较小范围内而保证检测效果,行程开关
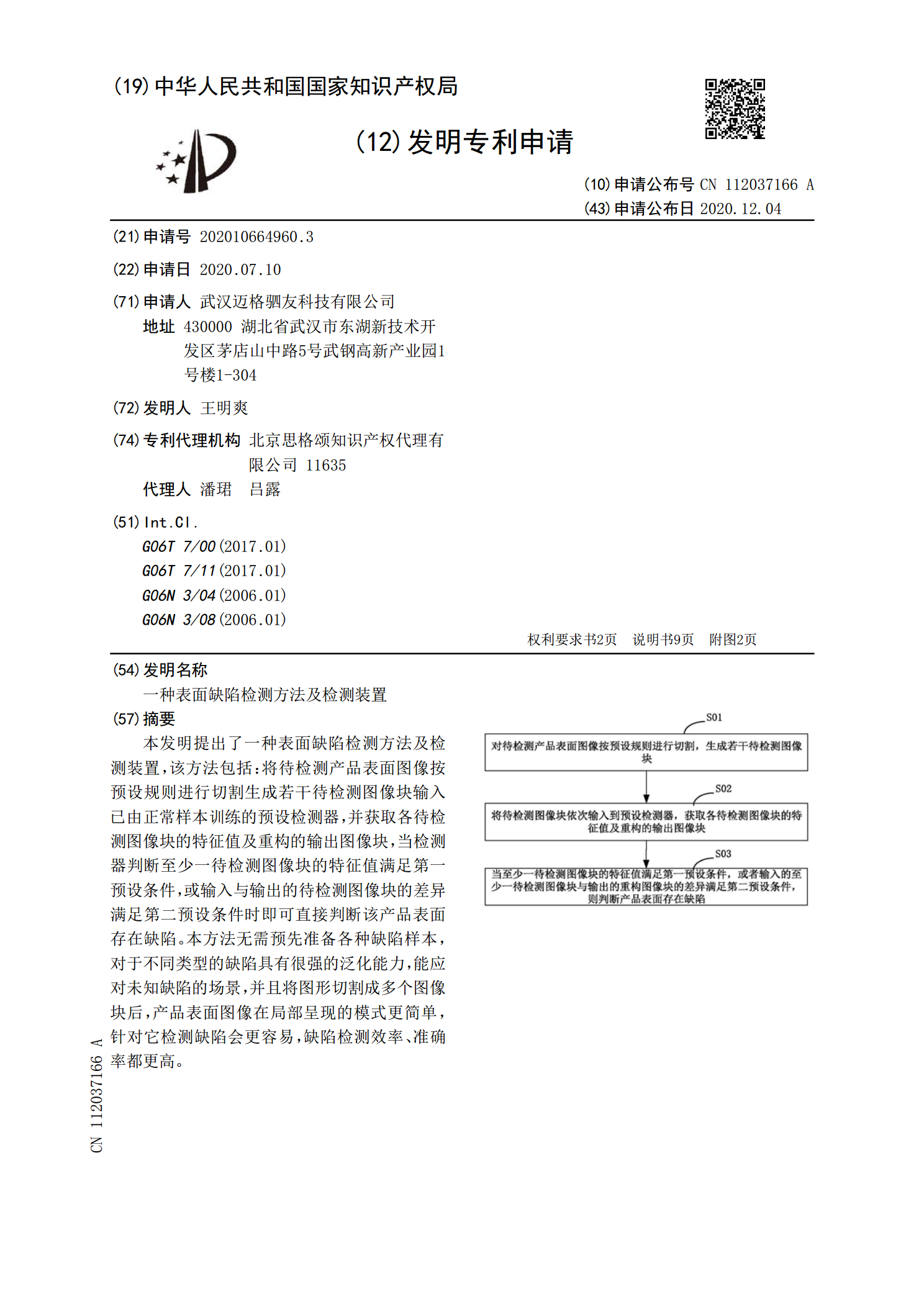
一种表面缺陷检测方法及检测装置.pdf
本发明提出了一种表面缺陷检测方法及检测装置,该方法包括:将待检测产品表面图像按预设规则进行切割生成若干待检测图像块输入已由正常样本训练的预设检测器,并获取各待检测图像块的特征值及重构的输出图像块,当检测器判断至少一待检测图像块的特征值满足第一预设条件,或输入与输出的待检测图像块的差异满足第二预设条件时即可直接判断该产品表面存在缺陷。本方法无需预先准备各种缺陷样本,对于不同类型的缺陷具有很强的泛化能力,能应对未知缺陷的场景,并且将图形切割成多个图像块后,产品表面图像在局部呈现的模式更简单,针对它检测缺陷会更