
狭小内腔结构的原位三维测量系统.pdf

音景****ka


1/10
2/10
3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

狭小内腔结构的原位三维测量系统.pdf
本发明的狭小内腔结构的原位三维测量系统,通过发光单元、成像及中继传像单元以及图像处理单元与基于机器视觉的光学截面测量技术相结合,在所述待测量内腔内对产生的对应待测量内腔内轮廓的多个环光学截面进行成像,并将所成的像中转至所述待测量内腔的外部以生成成像图像,并对图像进行处理获得内腔轮廓的三维结构测量数据;本发明不仅可以实现在原位测量,还提高了测量速度以及减少环境振动的影响,尤其是可测量范围大,可以适应于不同深度以及口径的内腔结构的三维轮廓测量,提高了狭小内腔结构测量的可达性与适应性,解决了现有技术的瓶颈问题。

内腔结构原位三维测量系统及方法.pdf
本发明提供一种内腔结构原位三维测量系统及方法,所述内腔结构原位三维测量系统包括:准直激光光源发射装置,用于发射平行的激光光束;环形光产生装置,用于根据所述激光光束产生沿光轴等间隔分布的多路平行环形光,以在待检测的内腔结构中同时产生多个内轮廓光学截面;成像装置,用于对所述内轮廓光学截面进行成像,以实现对所述待检测的内腔结构进行三维测量。本发明实现了对内腔结构多个轮廓截面的同时扫描与测量,解决了常规三维扫描设备的实现原位测量的困难、可达性、对环境振动敏感、测量效率低等问题。
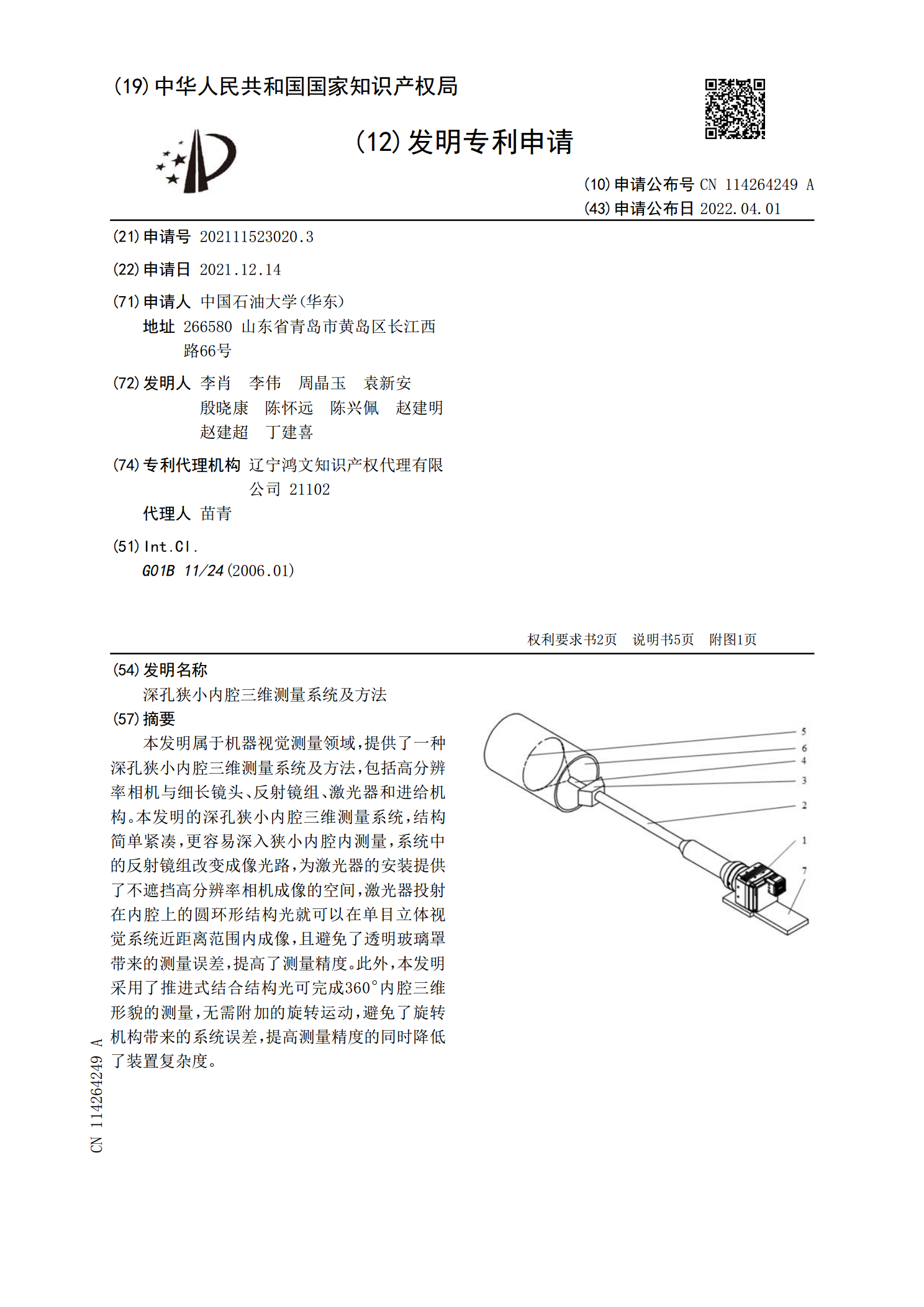
深孔狭小内腔三维测量系统及方法.pdf
本发明属于机器视觉测量领域,提供了一种深孔狭小内腔三维测量系统及方法,包括高分辨率相机与细长镜头、反射镜组、激光器和进给机构。本发明的深孔狭小内腔三维测量系统,结构简单紧凑,更容易深入狭小内腔内测量,系统中的反射镜组改变成像光路,为激光器的安装提供了不遮挡高分辨率相机成像的空间,激光器投射在内腔上的圆环形结构光就可以在单目立体视觉系统近距离范围内成像,且避免了透明玻璃罩带来的测量误差,提高了测量精度。此外,本发明采用了推进式结合结构光可完成360°内腔三维形貌的测量,无需附加的旋转运动,避免了旋转机构带来

内腔测量装置及内腔测量方法.pdf
本发明公开了一种内腔测量装置及内腔测量方法,内腔测量装置包括壳体、测量杆、主轴和转轮,壳体的一侧设置有通孔,测量杆滑动连接在通孔中,主轴可转动的连接在壳体上,主轴上设置有第一齿轮,第一齿轮位于壳体内,测量杆位于壳体内的端部设置有齿条结构,齿轮与齿条结构啮合,转轮的转轴可转动的连接在壳体上,转轴与主轴传动连接,转轮上设置有第一刻度圈,壳体上绕转轮设置有第二刻度圈。在测量内腔过程中,通过转动转轮使测量杆向外伸长直至内腔测量装置的测量杆抵靠在内腔的内壁上,通过读取第一刻度圈和第二刻度圈显示的数据便可以准确的测量

面向智能制造的原位三维精密测量技术及系统.docx
面向智能制造的原位三维精密测量技术及系统随着智能制造技术的不断发展,三维精密测量技术在工业生产中也变得愈发重要。传统的二维测量技术已经不能满足高精度的生产需求,而三维精密测量技术则可以帮助工业生产中的制造和装配环节实现高精度和高效率。本论文将讨论面向智能制造的原位三维精密测量技术及系统的重要性、原理、技术特点和应用场景。一、面向智能制造的原位三维精密测量技术及系统的重要性随着智能制造技术的发展,生产过程越来越自动化,制造设备的自动化程度也在不断提高。但是面对生产环境的实际问题,如若没有精密的测量技术,很难