
深孔狭小内腔三维测量系统及方法.pdf

小琛****82


1/9

2/9

3/9
4/9

5/9
6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
深孔狭小内腔三维测量系统及方法.pdf
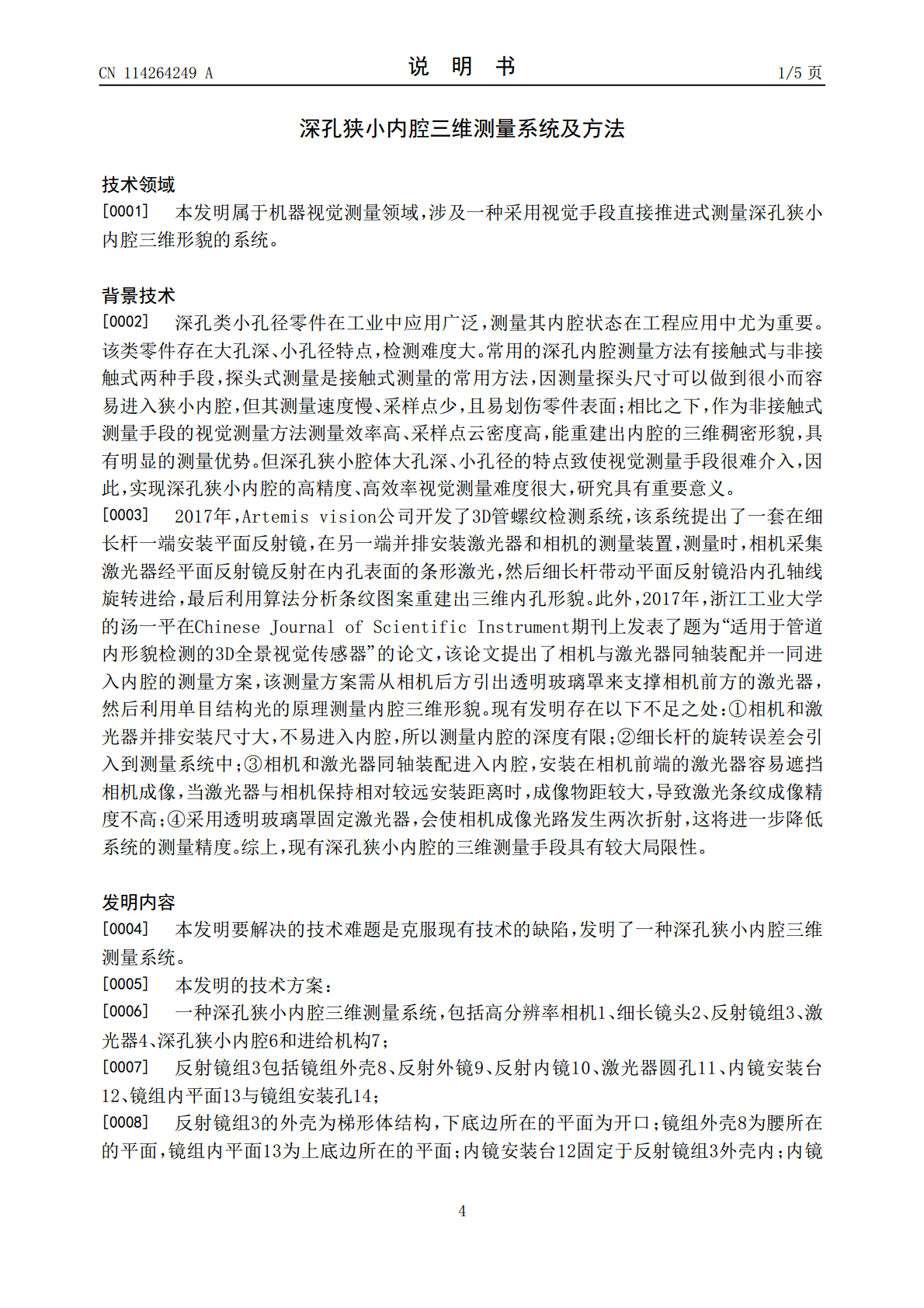
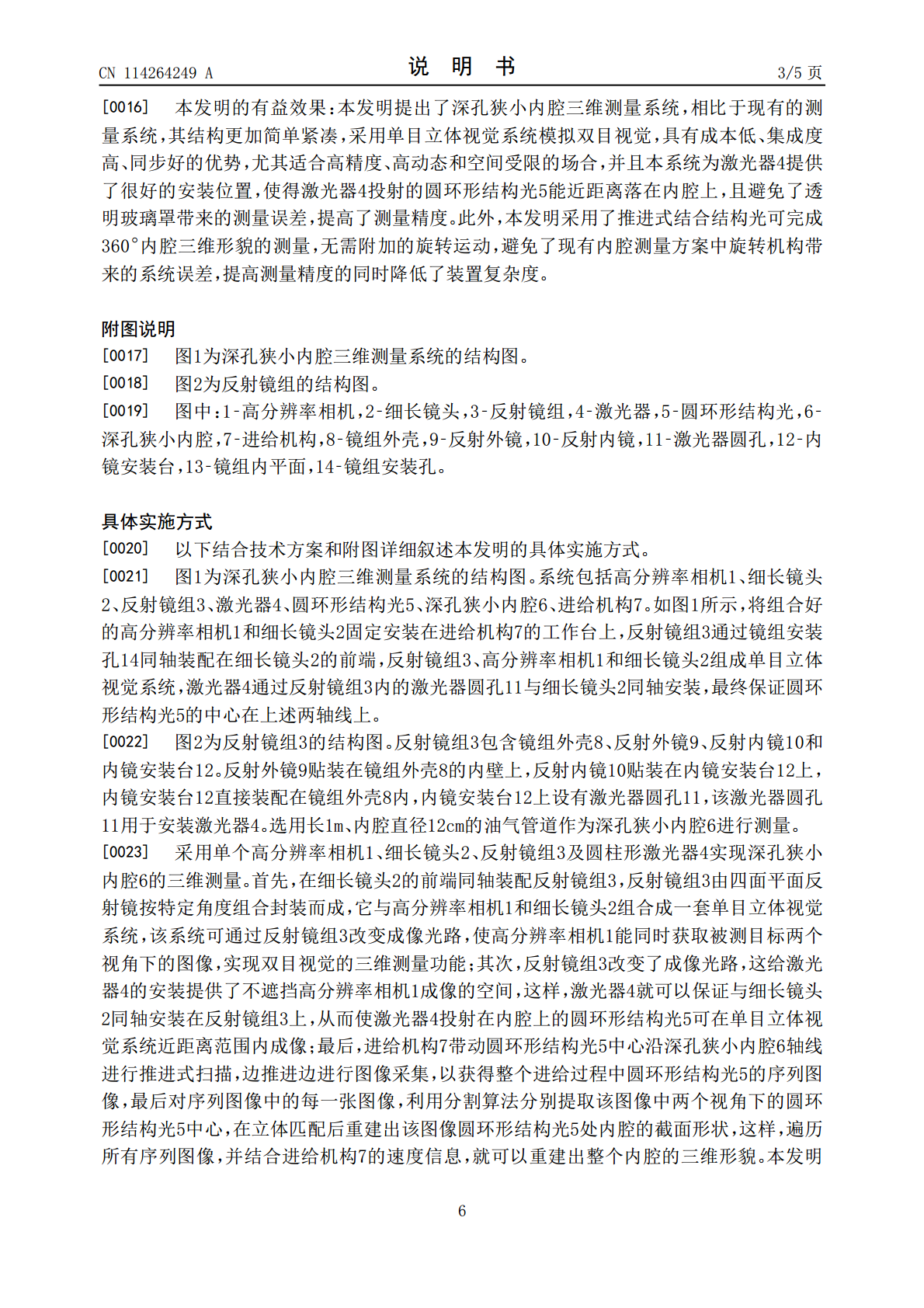
本发明属于机器视觉测量领域,提供了一种深孔狭小内腔三维测量系统及方法,包括高分辨率相机与细长镜头、反射镜组、激光器和进给机构。本发明的深孔狭小内腔三维测量系统,结构简单紧凑,更容易深入狭小内腔内测量,系统中的反射镜组改变成像光路,为激光器的安装提供了不遮挡高分辨率相机成像的空间,激光器投射在内腔上的圆环形结构光就可以在单目立体视觉系统近距离范围内成像,且避免了透明玻璃罩带来的测量误差,提高了测量精度。此外,本发明采用了推进式结合结构光可完成360°内腔三维形貌的测量,无需附加的旋转运动,避免了旋转机构带来

狭小内腔结构的原位三维测量系统.pdf
本发明的狭小内腔结构的原位三维测量系统,通过发光单元、成像及中继传像单元以及图像处理单元与基于机器视觉的光学截面测量技术相结合,在所述待测量内腔内对产生的对应待测量内腔内轮廓的多个环光学截面进行成像,并将所成的像中转至所述待测量内腔的外部以生成成像图像,并对图像进行处理获得内腔轮廓的三维结构测量数据;本发明不仅可以实现在原位测量,还提高了测量速度以及减少环境振动的影响,尤其是可测量范围大,可以适应于不同深度以及口径的内腔结构的三维轮廓测量,提高了狭小内腔结构测量的可达性与适应性,解决了现有技术的瓶颈问题。

内腔结构原位三维测量系统及方法.pdf
本发明提供一种内腔结构原位三维测量系统及方法,所述内腔结构原位三维测量系统包括:准直激光光源发射装置,用于发射平行的激光光束;环形光产生装置,用于根据所述激光光束产生沿光轴等间隔分布的多路平行环形光,以在待检测的内腔结构中同时产生多个内轮廓光学截面;成像装置,用于对所述内轮廓光学截面进行成像,以实现对所述待检测的内腔结构进行三维测量。本发明实现了对内腔结构多个轮廓截面的同时扫描与测量,解决了常规三维扫描设备的实现原位测量的困难、可达性、对环境振动敏感、测量效率低等问题。

基于线结构光的复杂深孔内轮廓三维测量方法.docx
基于线结构光的复杂深孔内轮廓三维测量方法摘要本文介绍了基于线结构光的复杂深孔内轮廓三维测量方法。该方法通过使用线结构光的光条,对复杂的深孔内轮廓进行了高精度的三维测量。本文提出了一种新的采集和处理技术,能够有效地减少噪声和提高测量精度。通过实验对测量结果进行了验证,证明了该方法的可行性和优越性。关键词:线结构光,深孔内轮廓,三维测量,采集,处理技术引言三维测量技术在制造业、汽车、航空航天等领域得到了广泛的应用。而对于内腔等复杂形态的轮廓,传统的三维测量方法往往难以实现高精度的测量。基于线结构光的三维测量方
一种深盲孔异形内腔头部型面车削方法及系统.pdf
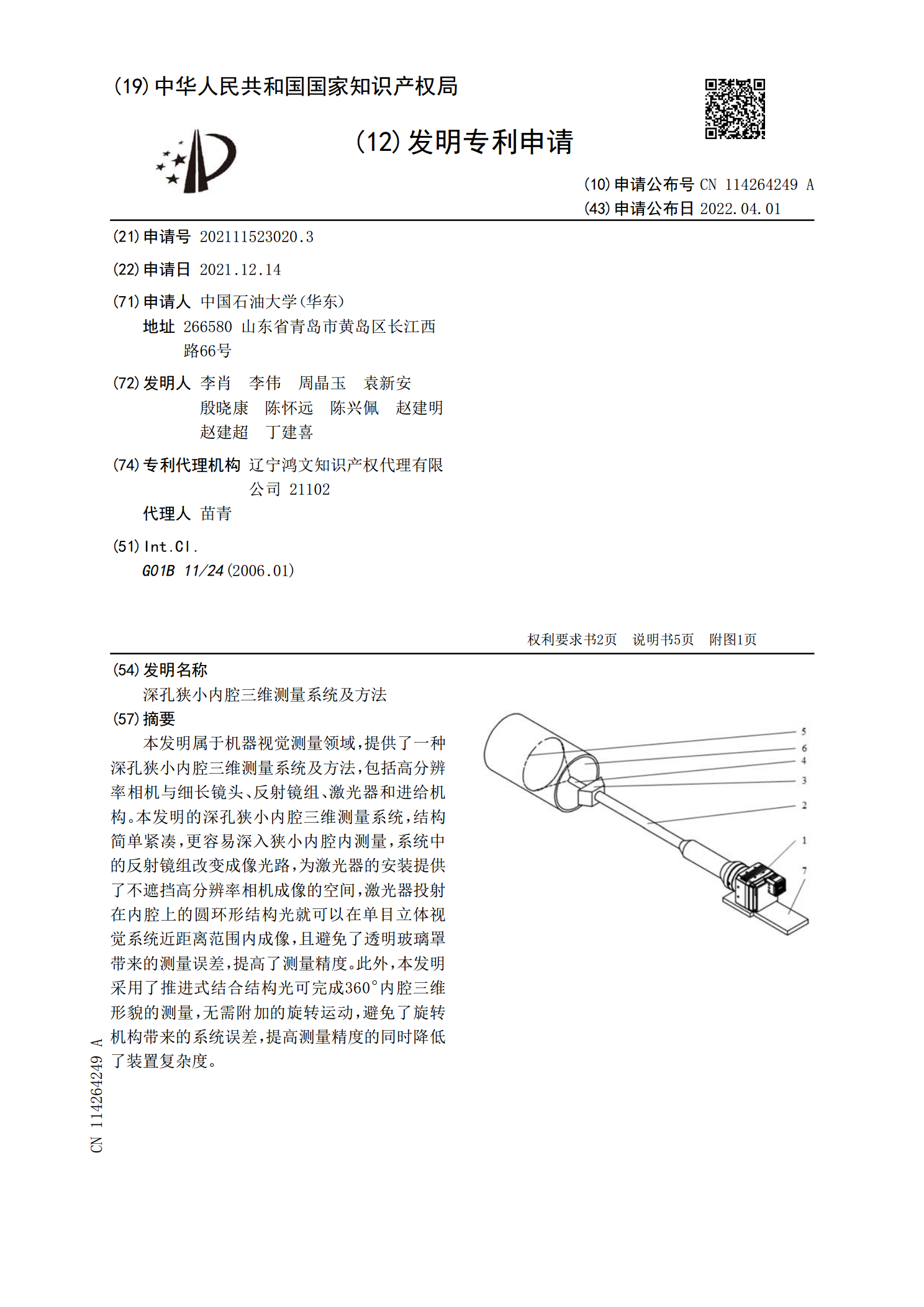
本发明公开一种深盲孔异形内腔头部型面车削方法及系统,包括步骤:去除深盲孔异形内腔零件的深盲孔余量,并建立加工基准和对刀基准;获取车削刀头各运动轴方向上的基本属性;对深盲孔异形内腔的异形头部型面进行型面拟合;基于回转半径、型面拟合结果使用异形型面轨迹模型计算出车削刀头在各运动轴方向的动作值;根据车削刀头在各个方向的动作值对车削出深盲孔异形内腔零件的异形头部型面;在端面及内孔进行准确的对刀建立加工的零点,通过数控镗杆的联动,实现内腔异形头部型面的一次完成高效高质量加工。根据要加工零件的深盲孔头部的尺寸,结合镗