
一种产品图像缺陷检测方法、系统、装置及介质.pdf

羽沫****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种产品图像缺陷检测方法、系统、装置及介质.pdf
本申请公开了一种产品图像缺陷检测方法、系统、装置及介质,主要应用于产品检测领域,该方法包括:获取待检测产品对应的点云图像,根据点云图像对应的点云信息获取点云轮廓线,根据多项式拟合方式对点云轮廓线进行拟合得到对应的拟合轮廓线,通过两轮廓线进行差分处理,根据差分处理的结果判断产品是否含有缺陷。通过上述方法,能够单通过一个差分处理的结果反应所述产品是否含有缺陷,避免将产品的各特征与分别设置的各类阈值进行比较,有效地提高了产品检测的速度,减少了对产品的检测时间,提高了检测效率;本申请还提供的产品图像缺陷检测系统、
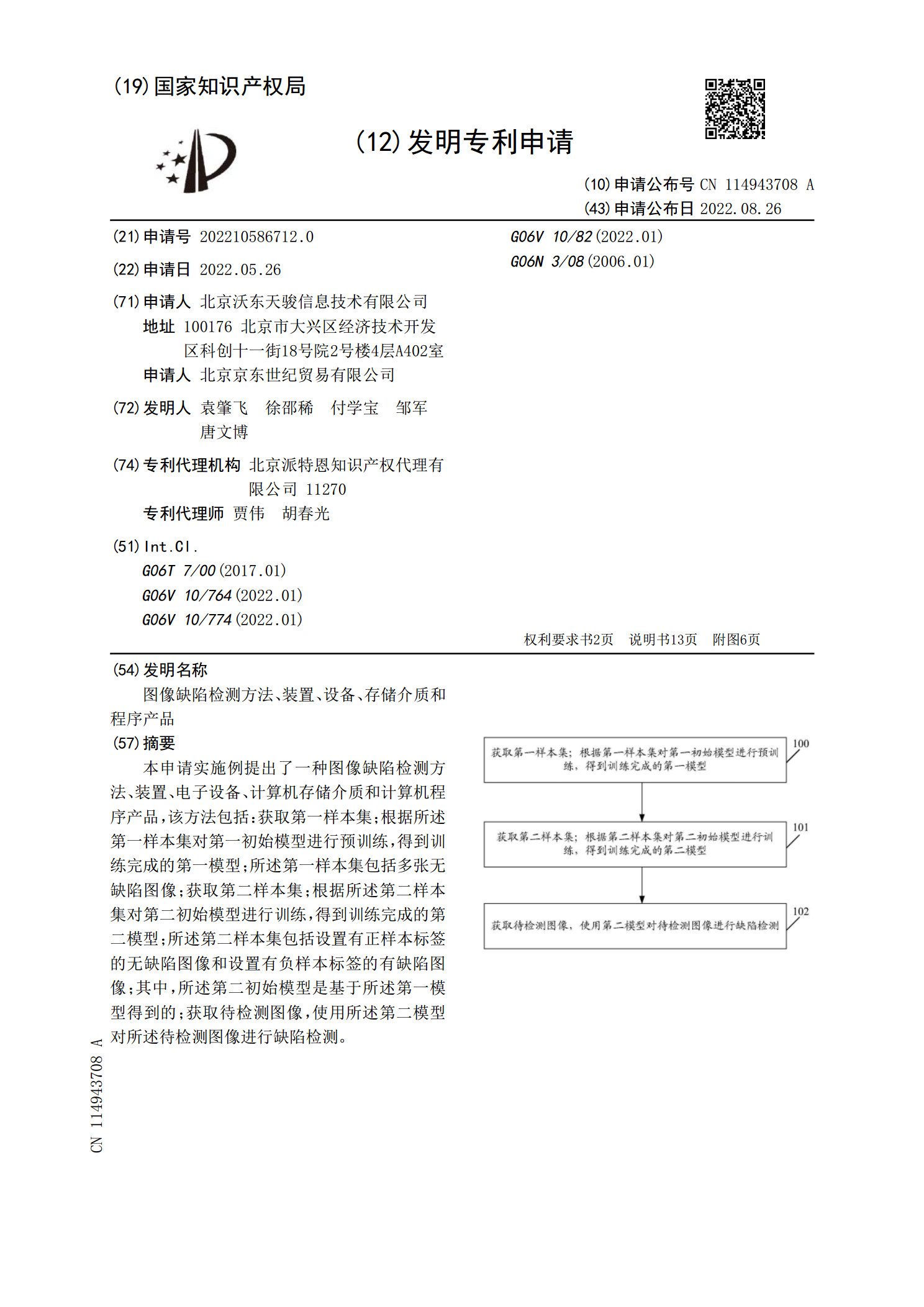
图像缺陷检测方法、装置、设备、存储介质和程序产品.pdf
本申请实施例提出了一种图像缺陷检测方法、装置、电子设备、计算机存储介质和计算机程序产品,该方法包括:获取第一样本集;根据所述第一样本集对第一初始模型进行预训练,得到训练完成的第一模型;所述第一样本集包括多张无缺陷图像;获取第二样本集;根据所述第二样本集对第二初始模型进行训练,得到训练完成的第二模型;所述第二样本集包括设置有正样本标签的无缺陷图像和设置有负样本标签的有缺陷图像;其中,所述第二初始模型是基于所述第一模型得到的;获取待检测图像,使用所述第二模型对所述待检测图像进行缺陷检测。

一种图像缺陷检测方法、装置、设备及存储介质.pdf
本申请公开了一种图像缺陷检测方法、装置、设备及存储介质。在图像缺陷检测方法中,首先获取待检测图像;接着将待检测图像分别输入到已训练的第一类图像重建模型和已训练的第二类图像重建模型中,获得第一类图像重建模型输出的第一类重建图像和第二类图像重建模型输出的第二类重建图像;最后根据第一类重建图像和第二类重建图像之间的差异确定待检测图像中的缺陷。两类模型的使用,建立了对于图像缺陷的联合检测的机制。本申请技术方案相比于采用单一的图像重建模型的输入输出来检测缺陷的方案,能够减少模型泛化能力过强带来的影响,从而更易于准确

产品缺陷的检测方法、装置及系统.pdf
本发明提供了一种产品缺陷的检测方法、装置及系统,涉及检测技术领域,该方法包括:获取待检测产品的多张产品图像;不同产品图像的采集角度和/或采集位置不同;通过预先训练得到的神经网络模型对产品图像进行缺陷检测,得到每张产品图像的缺陷信息;缺陷信息包括缺陷位置和/或缺陷种类;基于每张产品图像的缺陷信息确定初始缺陷检测结果;对初始缺陷检测结果进行验证;基于验证后的初始缺陷检测结果确定最终缺陷检测结果。本发明能够有效提升产品缺陷检测的准确率。
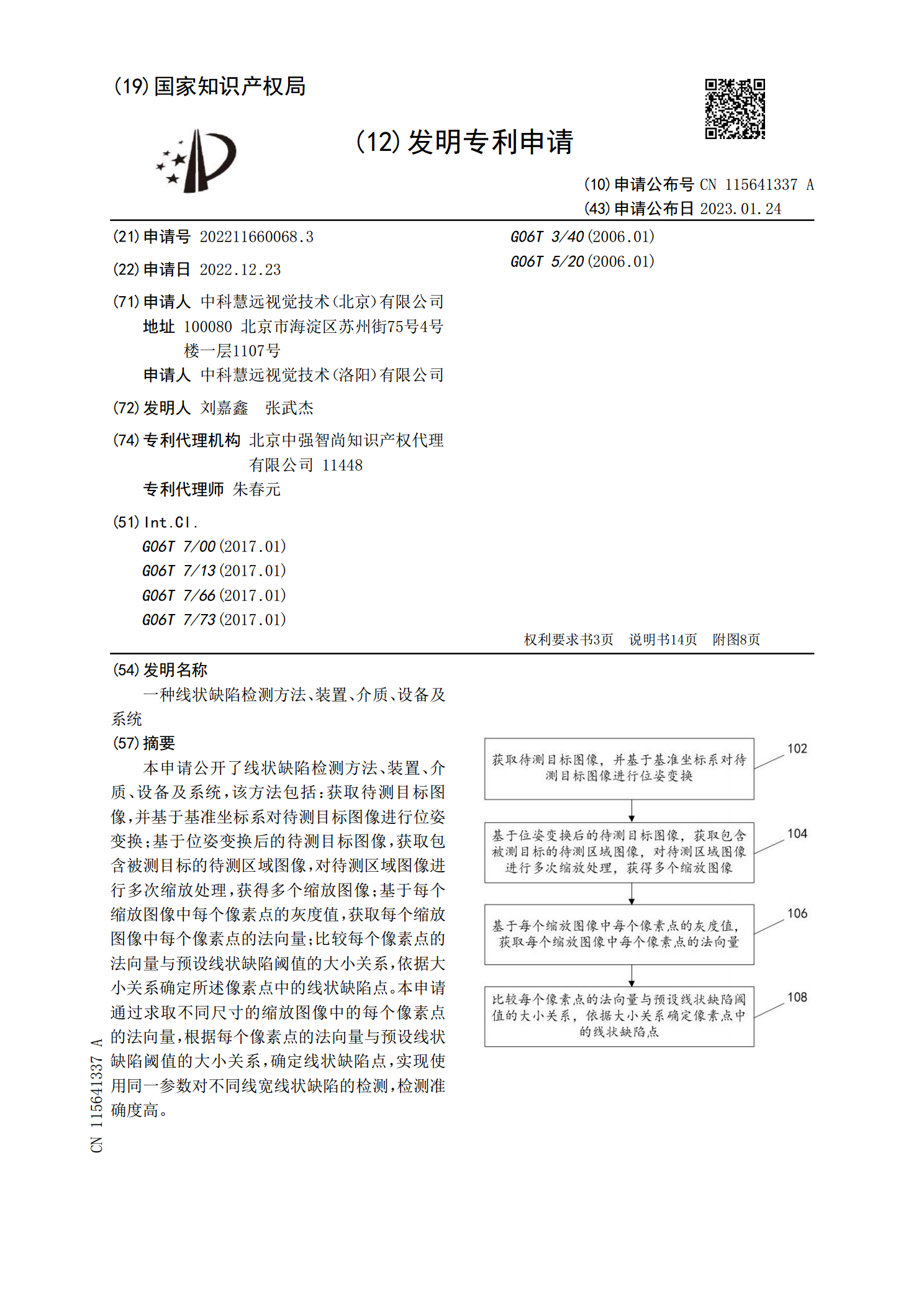
一种线状缺陷检测方法、装置、介质、设备及系统.pdf
本申请公开了线状缺陷检测方法、装置、介质、设备及系统,该方法包括:获取待测目标图像,并基于基准坐标系对待测目标图像进行位姿变换;基于位姿变换后的待测目标图像,获取包含被测目标的待测区域图像,对待测区域图像进行多次缩放处理,获得多个缩放图像;基于每个缩放图像中每个像素点的灰度值,获取每个缩放图像中每个像素点的法向量;比较每个像素点的法向量与预设线状缺陷阈值的大小关系,依据大小关系确定所述像素点中的线状缺陷点。本申请通过求取不同尺寸的缩放图像中的每个像素点的法向量,根据每个像素点的法向量与预设线状缺陷阈值的大