
一种折叠臂两栖四旋翼无人机.pdf

一吃****瀚文

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种折叠臂两栖四旋翼无人机.pdf
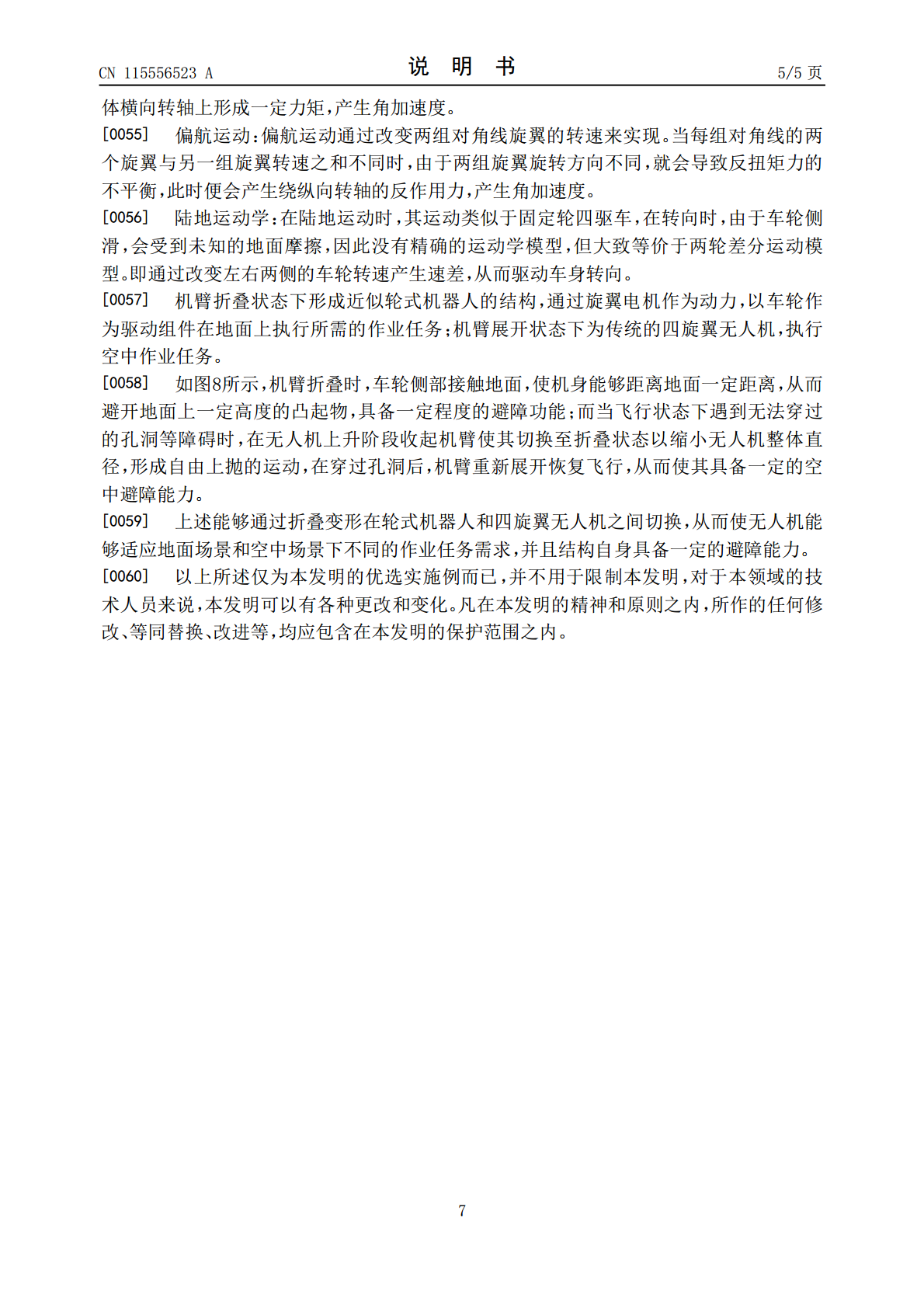
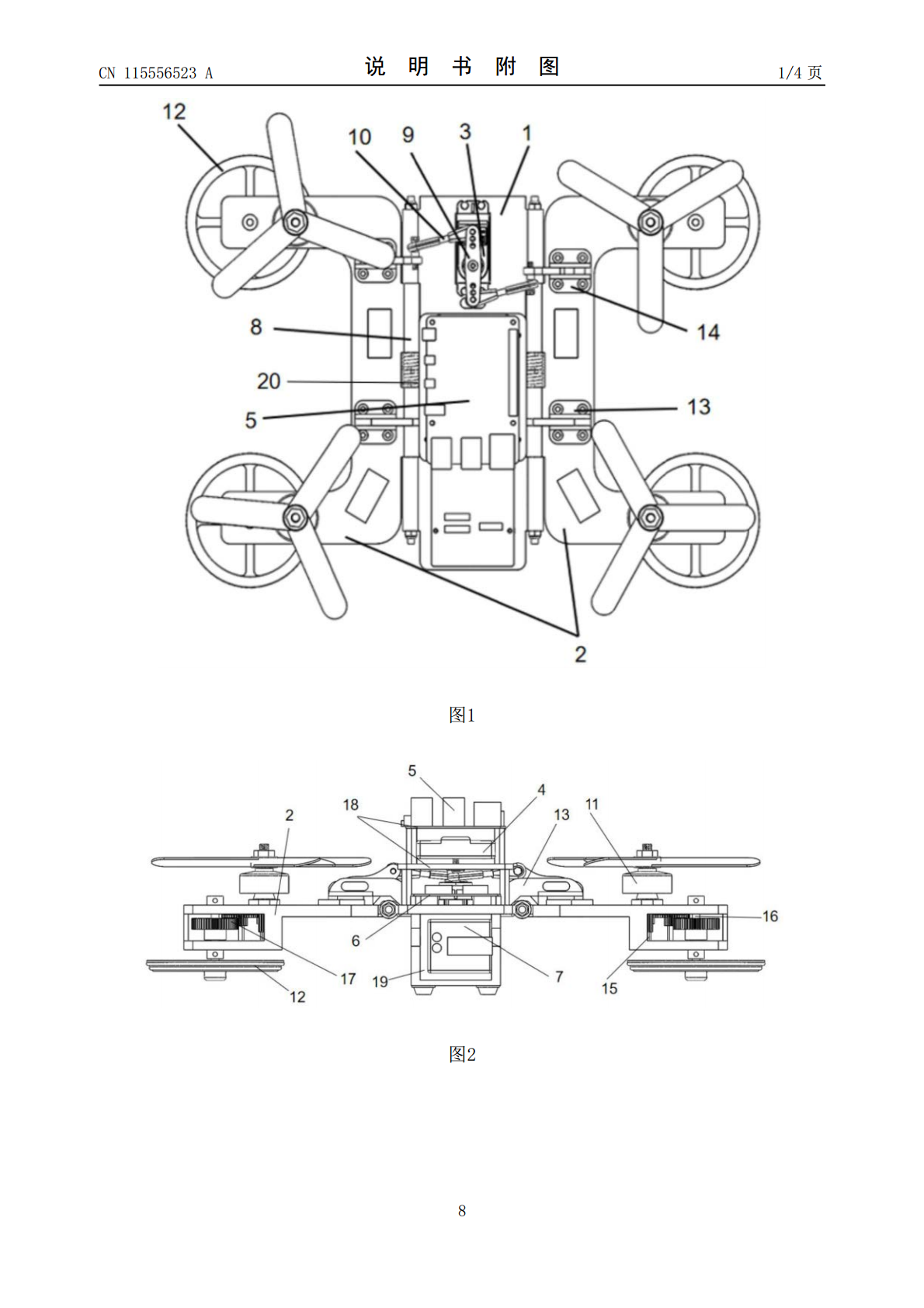
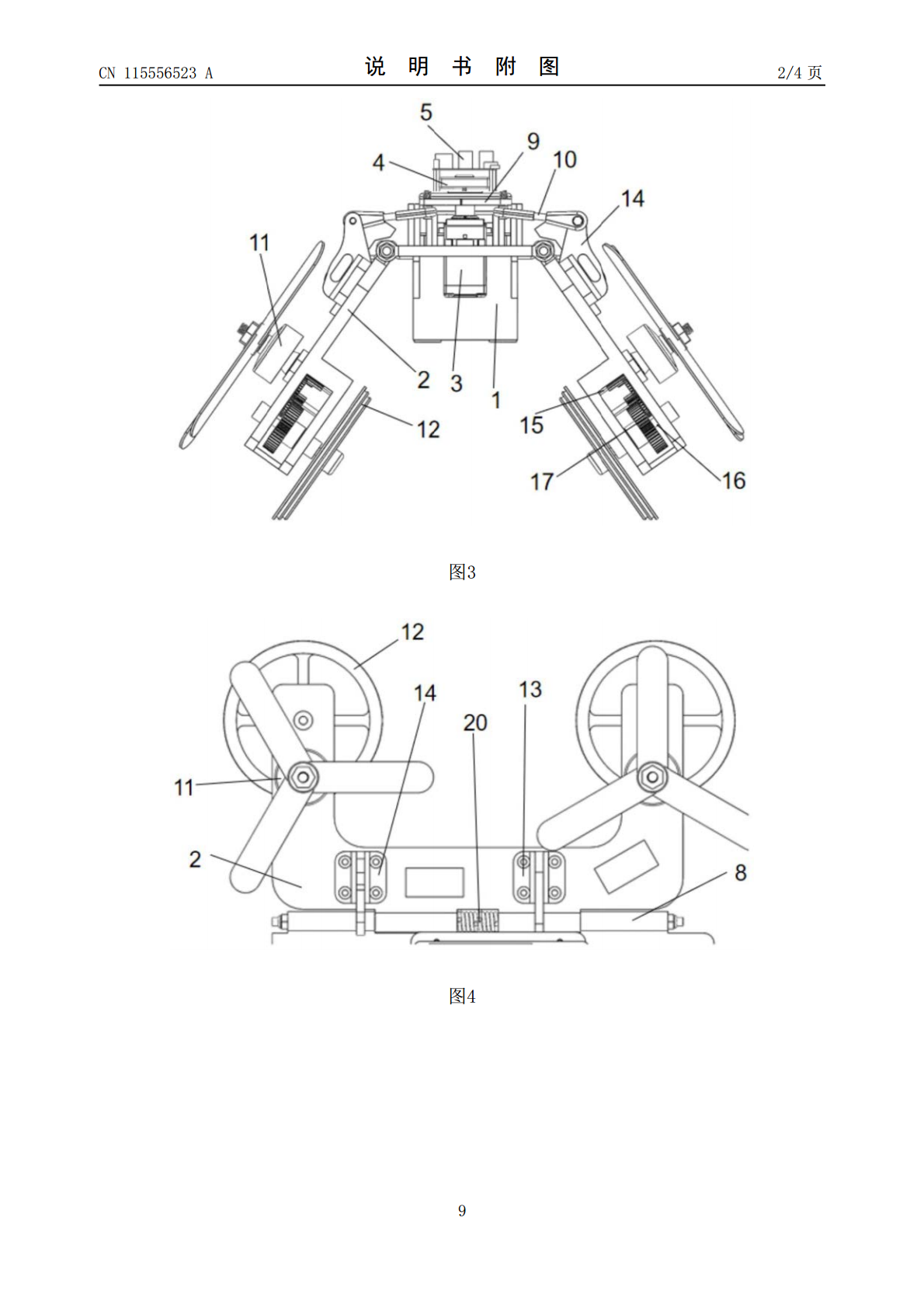
本发明涉及一种折叠臂两栖四旋翼无人机,包括活动连接在机身两侧的机臂,机臂远端的上表面设有与旋翼电机连接的旋翼,下表面设有通过减速齿轮组与旋翼电机连接的车轮,机身上设有变形舵机,变形舵机的输出轴连接一字型舵臂,一字型舵臂的两端分别通过万向球头连接杆与机臂上设置的万向球头支座活动连接;通过变形舵机带动一字型舵臂的两端绕输出轴转动,经对应的万向球头连接杆带动万向球头支座和机臂运动,使机臂与机身之间的角度改变实现展开或折叠。在四旋翼无人机的基础上,增加了轮式机器人的运动模态,具备变形能力,能够通过折叠变形在轮式机
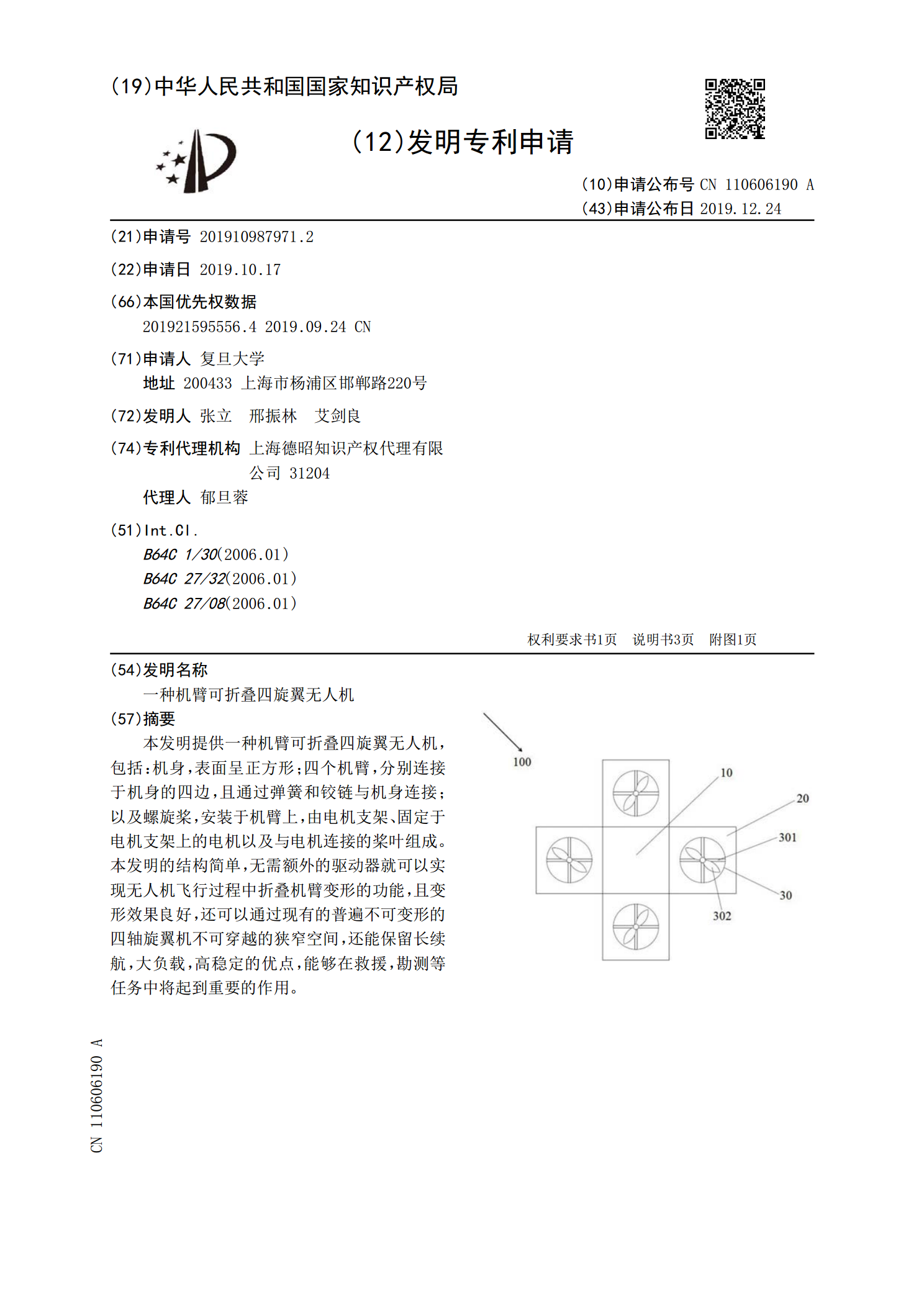
一种机臂可折叠四旋翼无人机.pdf
本发明提供一种机臂可折叠四旋翼无人机,包括:机身,表面呈正方形;四个机臂,分别连接于机身的四边,且通过弹簧和铰链与机身连接;以及螺旋桨,安装于机臂上,由电机支架、固定于电机支架上的电机以及与电机连接的桨叶组成。本发明的结构简单,无需额外的驱动器就可以实现无人机飞行过程中折叠机臂变形的功能,且变形效果良好,还可以通过现有的普遍不可变形的四轴旋翼机不可穿越的狭窄空间,还能保留长续航,大负载,高稳定的优点,能够在救援,勘测等任务中将起到重要的作用。

一种多旋翼飞行器旋翼臂折叠机构.pdf
本发明公开了一种多旋翼飞行器旋翼臂折叠机构,包括凸棘轮旋转轴、按压限位板、弹簧、机身连接壳、机身连接限位件和旋翼臂。其中,凸棘轮与旋翼臂固连,中段设有凸轮结构和棘轮结构。按压限位板安装在机身连接限位件的滑槽内,底部设盲孔,上端穿过机身连接壳上的孔,中间开槽。弹簧安装在机身连接壳上,插入按压限位板的盲孔内。机身连接壳与机身固连,侧边与上部设通孔,底部设盲孔。机身连接限位件与机身固连,其上设有通孔和滑槽。本发明采用凸棘轮混合旋转轴,可进行精确周向限位,限位机构采用面接触和楔形配合,可以容忍制造误差并增强限位效

一种地空两栖四旋翼无人机.pdf
本发明公开了一种地空两栖四旋翼无人机,它包括无人机机体(1)和设置于机体(1)内的控制单元和电池,机体(1)的四个角落处均连接有机臂(2),四个机臂(2)的末端均连接有模式切换机构,模式切换机构由舵机A(3)、舵机座(4)、无刷电机(5)、阶梯轴(6)、桨座(7)、螺旋桨(8)、单向轴承(9)和车轮(10)组成,阶梯轴(6)的小轴上安装有单向轴承(9),车轮(10)旋转安装于单向轴承(9)上。本发明的有益效果是:续航时间长、可以完成相对精细操作的同时拥有灵活的机动性和较高的越障能力以及移动速度、使用寿命长
一种折叠式多旋翼无人机.pdf
本发明涉及多旋翼无人机技术领域,且公开了一种折叠式多旋翼无人机,包括无人机本体,无人机本体的四周均匀分布有多个主支撑杆,主支撑杆与无人机本体固定连接,主支撑杆远离无人机本体的一端均固定连接有Y型连接件,Y型连接件远离主支撑杆的两端均铰接有套管,套管为空心结构,套管靠近Y型连接件的一端内部固定连接有安装板,安装板上固定连接有第一伸缩杆,第一伸缩杆远离安装板的一侧滑动套接有第二伸缩杆,第二伸缩杆远离第一伸缩杆的一端贯穿套管的外侧壁,且固定连接有限位板,限位板和套管之间共同固定连接有弹簧,第二伸缩杆套在弹簧的内