
一种直升机旋翼桨叶变形测量装置及方法.pdf

灵慧****89


1/10
2/10

3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种直升机旋翼桨叶变形测量装置及方法.pdf
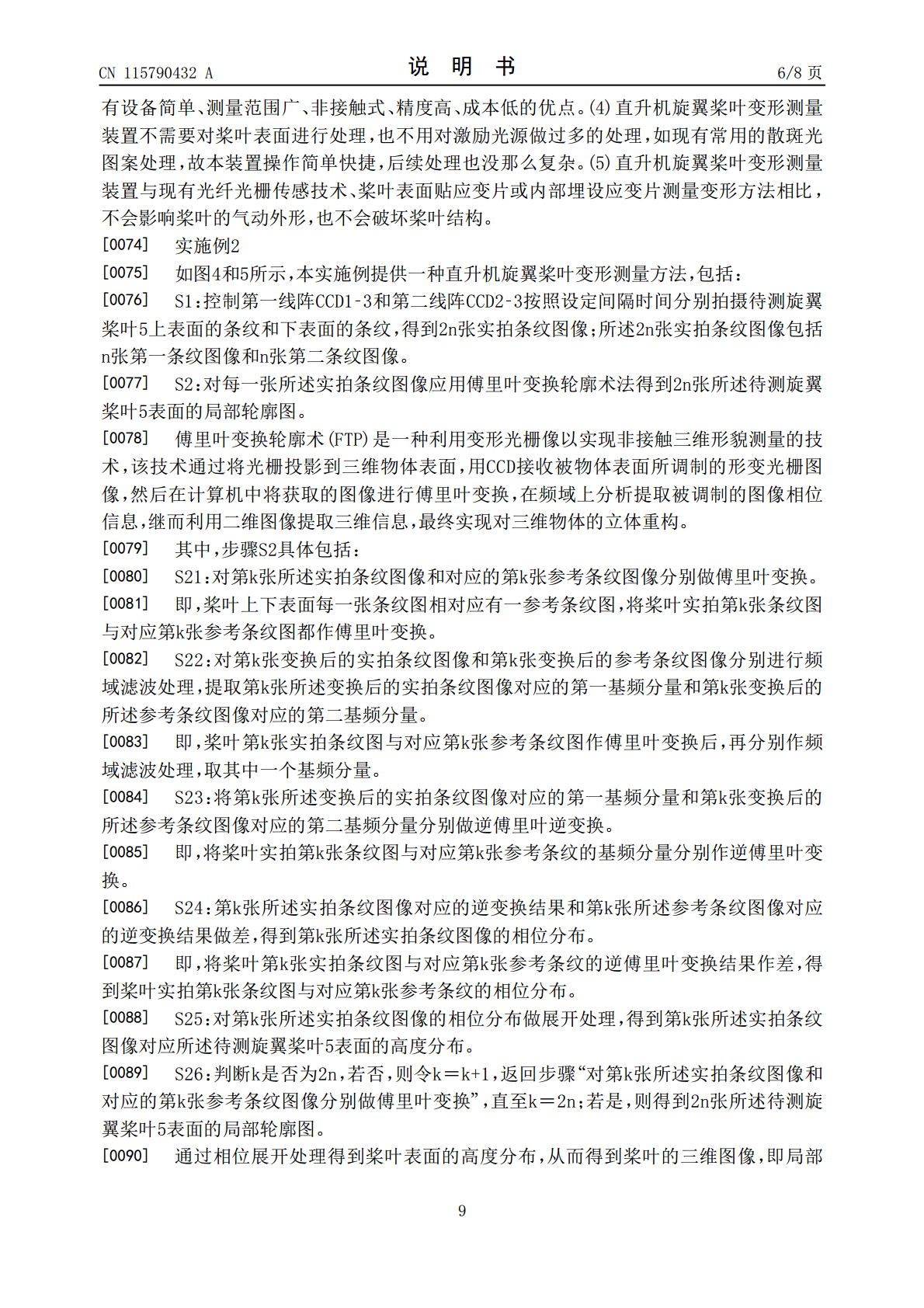
本发明涉及一种直升机旋翼桨叶变形测量装置及方法,包括:两个半导体激光器、两个正弦光栅、两个线阵CCD和一个数据接收及处理单元。半导体激光器出射光束为光刀,正弦光栅用来接收光刀后落至旋翼桨叶展向平面上形成条纹,线阵CCD采集桨叶表面所有条纹,数据接收及处理单元用于接收线阵CCD采集的条纹信息,并应用傅里叶变换轮廓术法得到待测旋翼桨叶的三维面形轮廓,以及对比不同旋翼转速下的待测旋翼桨叶的三维面形轮廓,得到桨叶变形量。通过桨叶的三维面形轮廓确定两种不同旋翼转速下桨叶的变形量,提高了桨叶变形测量的准确性。
直升机旋翼桨叶变形及表面压力同步测量装置及方法.pdf
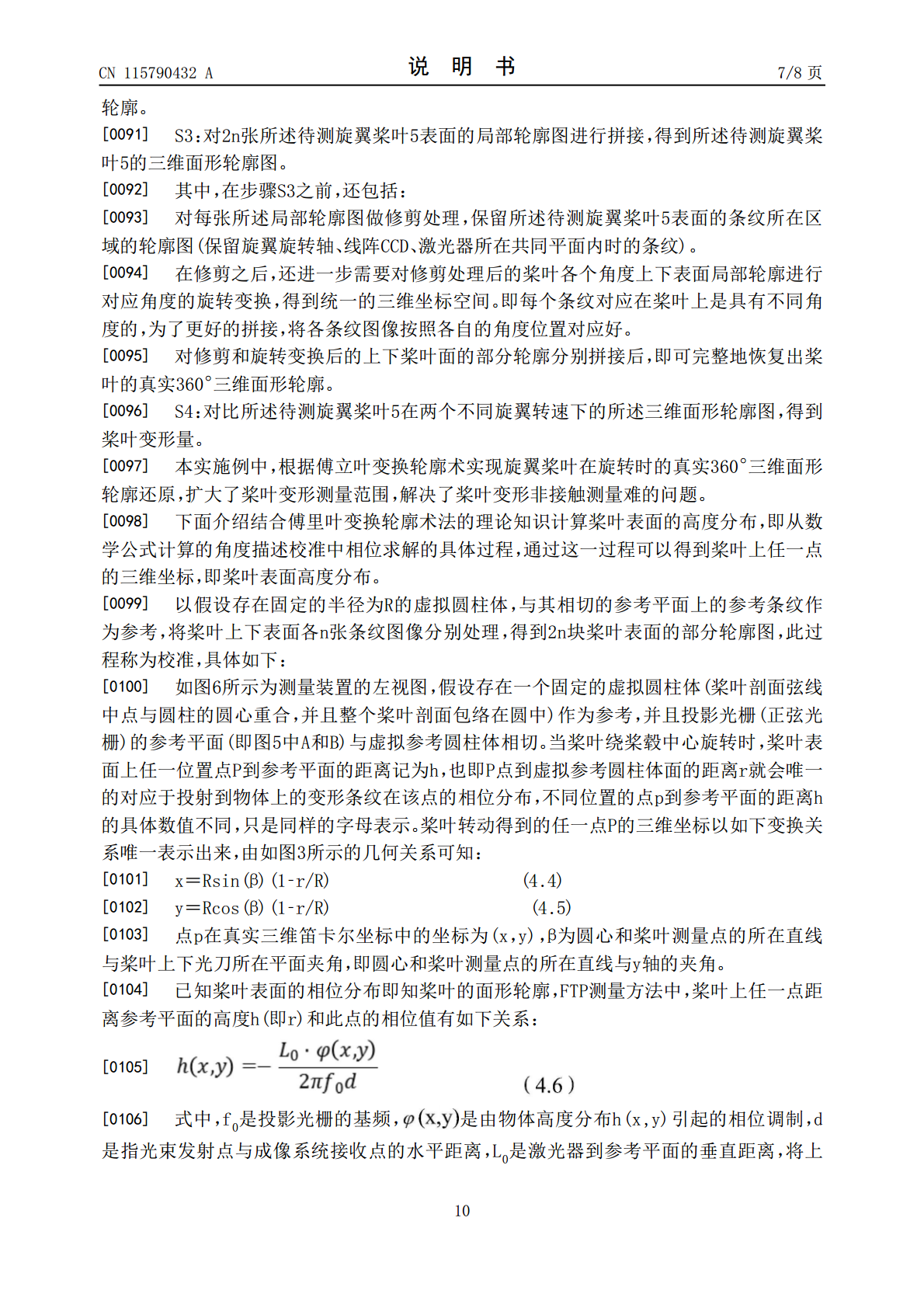
本发明公开了一种直升机旋翼桨叶变形及表面压力同步测量装置及方法,该装置包括:激励光源、扩束透镜、散斑发生器、反射镜及相机组件,所述激励光源用来生成点光源,所述扩束透镜用来接收点光源并进行扩束,所述散斑发生器用来接收扩束后的光信号,所述反射镜用来将经过所述散斑发生器后光信号反射至旋翼的桨平面;通过相机组件来采集图像信息。该方法是基于上述装置来实施的。本发明具有操作简单、非接触式、精度高、测量效率高、安全性好等优点。
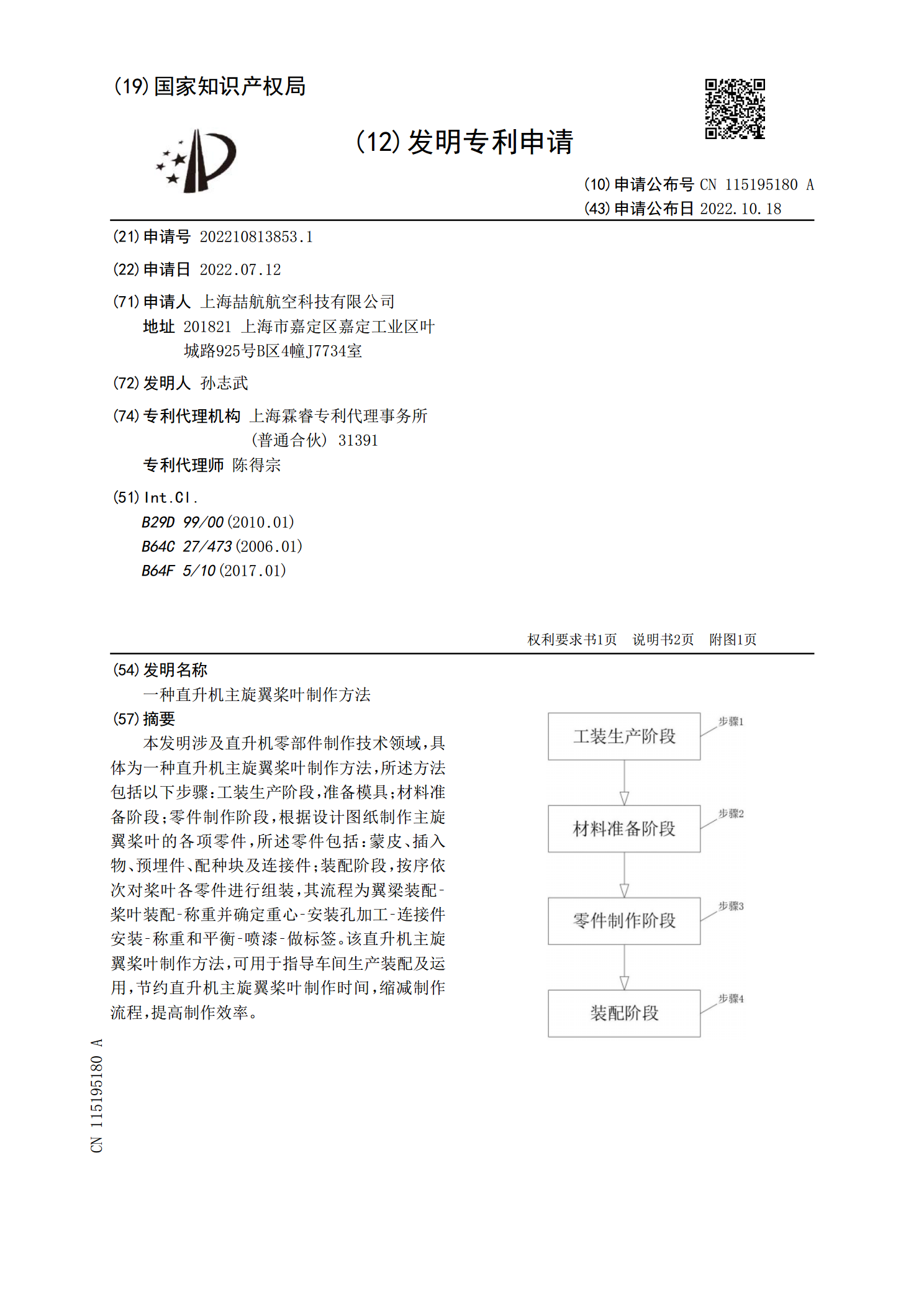
一种直升机主旋翼桨叶制作方法.pdf
本发明涉及直升机零部件制作技术领域,具体为一种直升机主旋翼桨叶制作方法,所述方法包括以下步骤:工装生产阶段,准备模具;材料准备阶段;零件制作阶段,根据设计图纸制作主旋翼桨叶的各项零件,所述零件包括:蒙皮、插入物、预埋件、配种块及连接件;装配阶段,按序依次对桨叶各零件进行组装,其流程为翼梁装配‑桨叶装配‑称重并确定重心‑安装孔加工‑连接件安装‑称重和平衡‑喷漆‑做标签。该直升机主旋翼桨叶制作方法,可用于指导车间生产装配及运用,节约直升机主旋翼桨叶制作时间,缩减制作流程,提高制作效率。

基于立体视觉的直升机旋翼桨叶三维动态变形测量.docx
基于立体视觉的直升机旋翼桨叶三维动态变形测量基于立体视觉的直升机旋翼桨叶三维动态变形测量摘要:直升机旋翼桨叶的动态变形对其飞行性能和安全性起着至关重要的作用。为了准确测量直升机旋翼桨叶的三维动态变形,本文提出一种基于立体视觉的测量方法。该方法利用两个相机在不同位置进行成像,通过图像处理和计算机视觉算法,可以实时获取旋翼桨叶的三维形状和运动信息。实验结果表明,该方法能够准确地测量直升机旋翼桨叶的动态变形。关键词:直升机,旋翼桨叶,动态变形,立体视觉,测量方法引言:直升机旋翼桨叶是直升机的重要组成部分,其动态
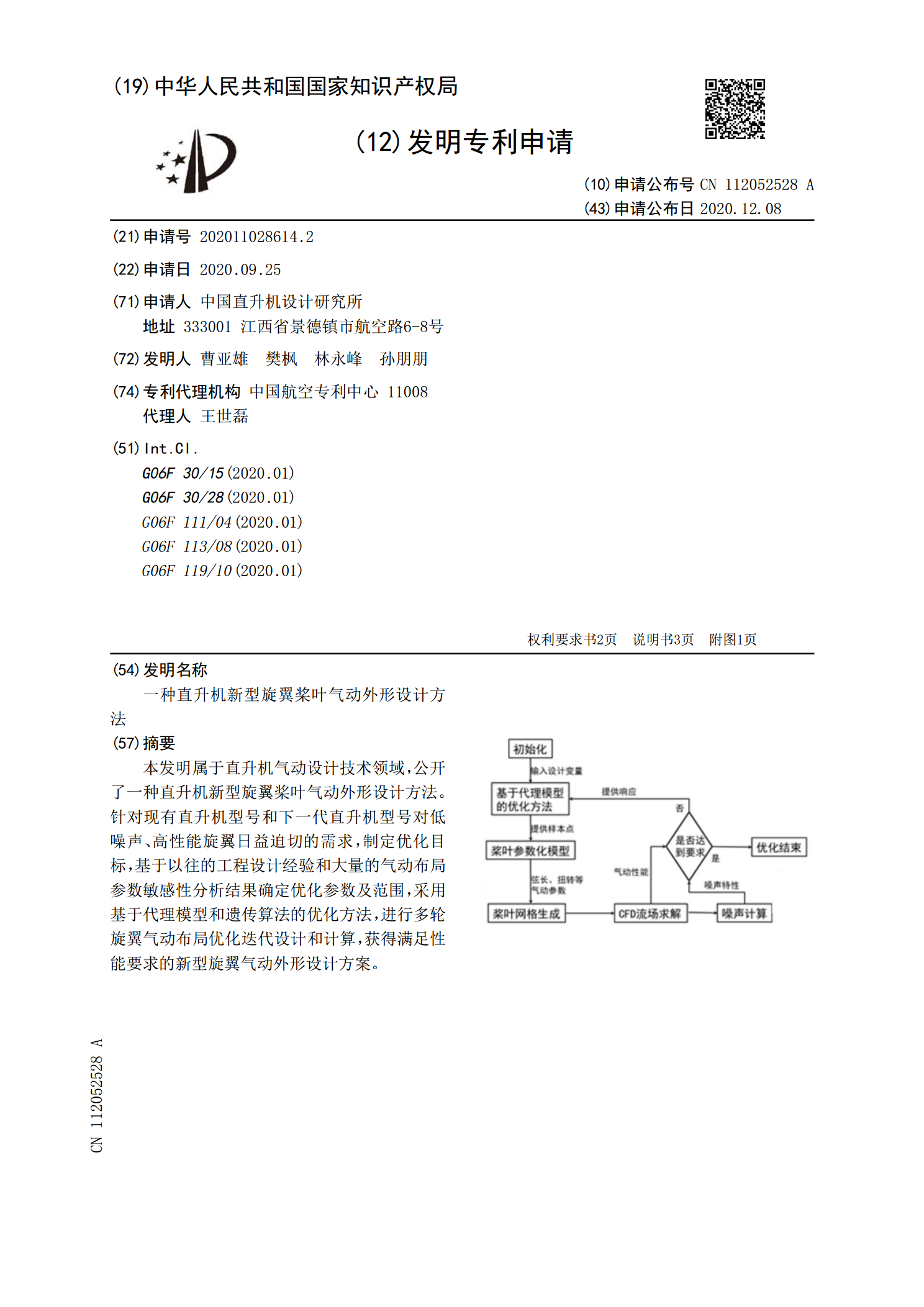
一种直升机新型旋翼桨叶气动外形设计方法.pdf
本发明属于直升机气动设计技术领域,公开了一种直升机新型旋翼桨叶气动外形设计方法。针对现有直升机型号和下一代直升机型号对低噪声、高性能旋翼日益迫切的需求,制定优化目标,基于以往的工程设计经验和大量的气动布局参数敏感性分析结果确定优化参数及范围,采用基于代理模型和遗传算法的优化方法,进行多轮旋翼气动布局优化迭代设计和计算,获得满足性能要求的新型旋翼气动外形设计方案。