
基于立体视觉的直升机旋翼桨叶三维动态变形测量.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于立体视觉的直升机旋翼桨叶三维动态变形测量.docx
基于立体视觉的直升机旋翼桨叶三维动态变形测量基于立体视觉的直升机旋翼桨叶三维动态变形测量摘要:直升机旋翼桨叶的动态变形对其飞行性能和安全性起着至关重要的作用。为了准确测量直升机旋翼桨叶的三维动态变形,本文提出一种基于立体视觉的测量方法。该方法利用两个相机在不同位置进行成像,通过图像处理和计算机视觉算法,可以实时获取旋翼桨叶的三维形状和运动信息。实验结果表明,该方法能够准确地测量直升机旋翼桨叶的动态变形。关键词:直升机,旋翼桨叶,动态变形,立体视觉,测量方法引言:直升机旋翼桨叶是直升机的重要组成部分,其动态
一种直升机旋翼桨叶变形测量装置及方法.pdf
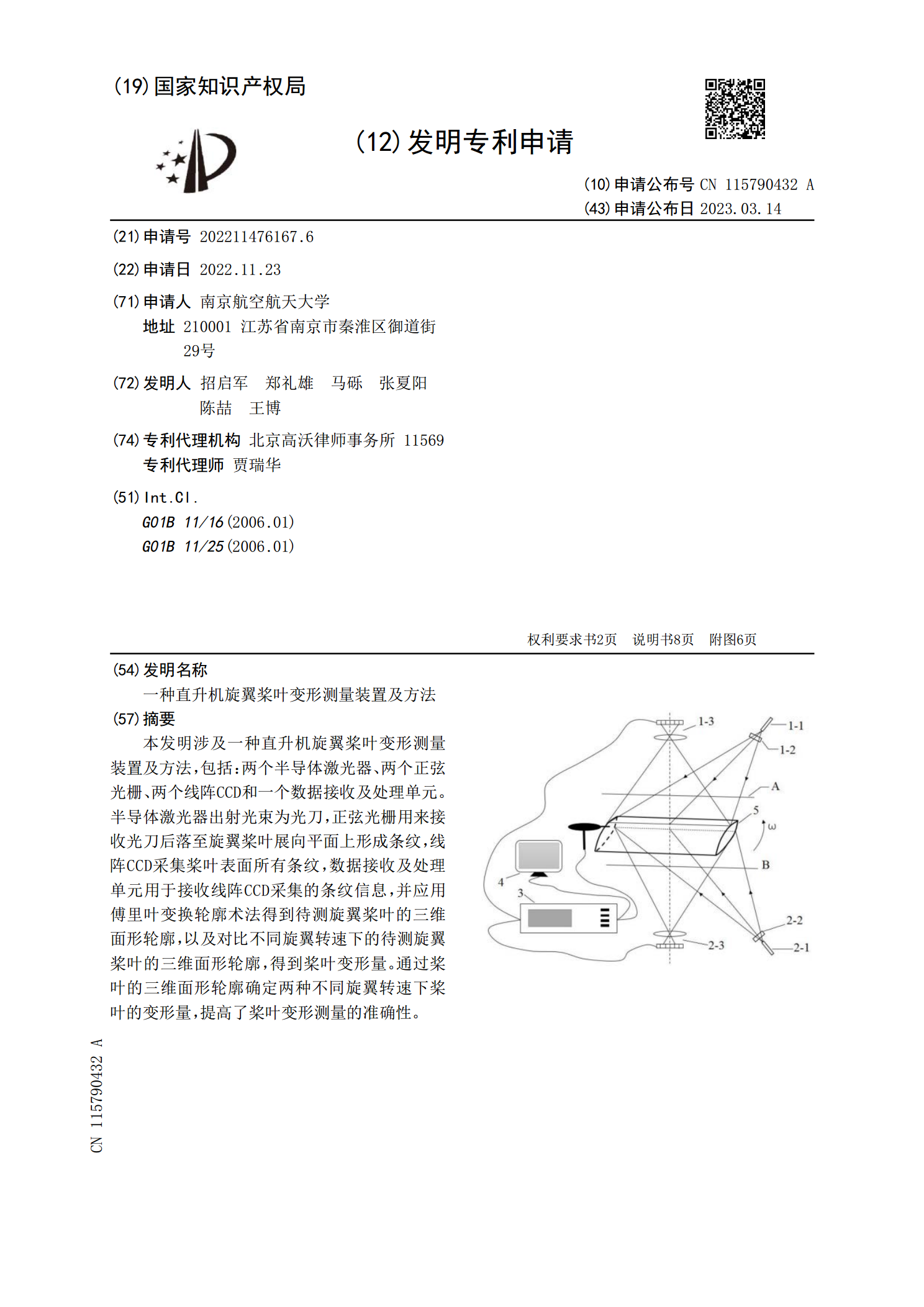
本发明涉及一种直升机旋翼桨叶变形测量装置及方法,包括:两个半导体激光器、两个正弦光栅、两个线阵CCD和一个数据接收及处理单元。半导体激光器出射光束为光刀,正弦光栅用来接收光刀后落至旋翼桨叶展向平面上形成条纹,线阵CCD采集桨叶表面所有条纹,数据接收及处理单元用于接收线阵CCD采集的条纹信息,并应用傅里叶变换轮廓术法得到待测旋翼桨叶的三维面形轮廓,以及对比不同旋翼转速下的待测旋翼桨叶的三维面形轮廓,得到桨叶变形量。通过桨叶的三维面形轮廓确定两种不同旋翼转速下桨叶的变形量,提高了桨叶变形测量的准确性。
直升机旋翼桨叶变形及表面压力同步测量装置及方法.pdf
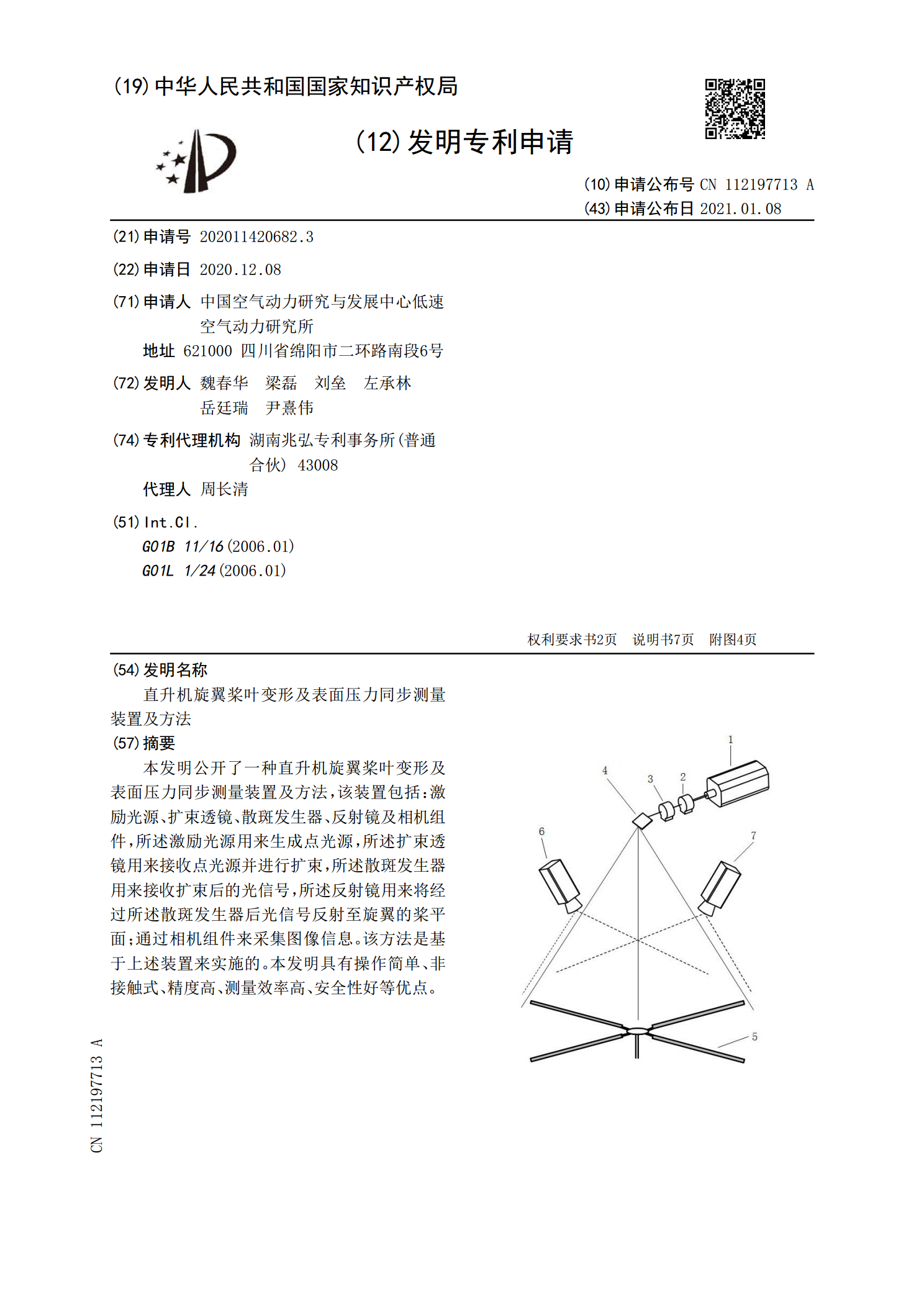
本发明公开了一种直升机旋翼桨叶变形及表面压力同步测量装置及方法,该装置包括:激励光源、扩束透镜、散斑发生器、反射镜及相机组件,所述激励光源用来生成点光源,所述扩束透镜用来接收点光源并进行扩束,所述散斑发生器用来接收扩束后的光信号,所述反射镜用来将经过所述散斑发生器后光信号反射至旋翼的桨平面;通过相机组件来采集图像信息。该方法是基于上述装置来实施的。本发明具有操作简单、非接触式、精度高、测量效率高、安全性好等优点。

基于立体视觉的动态变形测量研究.docx
基于立体视觉的动态变形测量研究基于立体视觉的动态变形测量研究摘要:动态变形测量是在工程实践中广泛应用的一项重要技术,它可以用于分析和评估结构在不同工况下的变形特性。近年来,随着立体视觉技术的发展,其在动态变形测量领域的应用逐渐增加。本论文介绍了基于立体视觉的动态变形测量研究,包括立体视觉的原理和方法、动态变形测量的基本概念和挑战,以及相关的算法和实验结果。研究表明,立体视觉可以提供高精度和实时的动态变形测量结果,为结构动态监测和安全评估提供了一种有效的方法。关键词:立体视觉,动态变形测量,结构监测,安全评

基于全景视觉的多功能直升机旋翼共锥度测量装置.pdf
本发明的目的在于提供基于全景视觉的多功能直升机旋翼共锥度测量装置,其特征是:包括双曲面反射镜、透视镜头、相机、图像处理单元、固定芯棒、转动圆筒、旋翼桨叶、传送带、异步直流电机、装置底座、滑环定子、滑环转子、固定底座、蜗轮、蜗杆、压线卡片、减速箱,本发明可满足不同的场合需要,具有结构精密紧凑、调节方便、安装维修简捷、工作稳定可靠的特点。