
一种超市分拣机器人的定位方法.pdf

一吃****瀚文

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种超市分拣机器人的定位方法.pdf
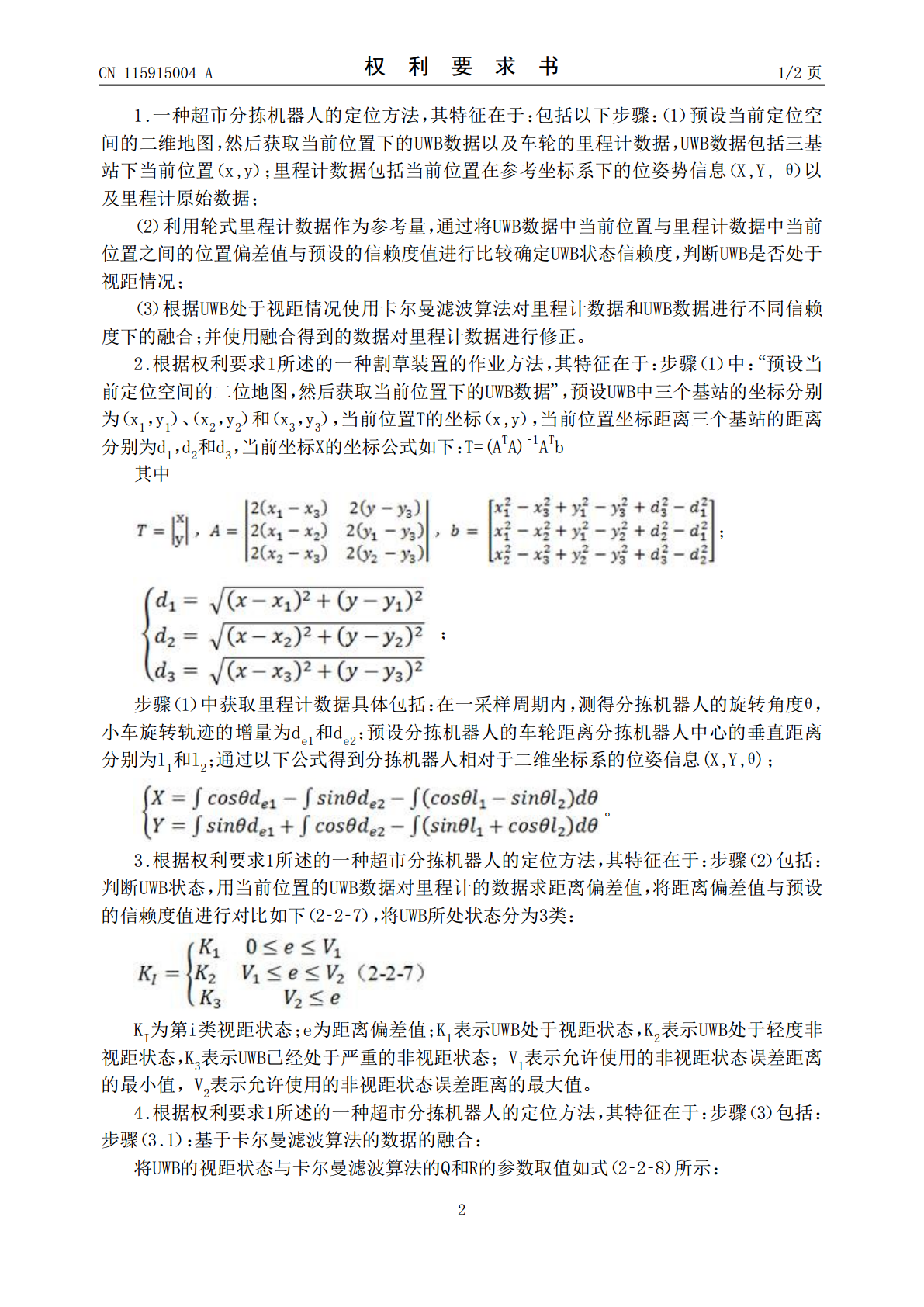
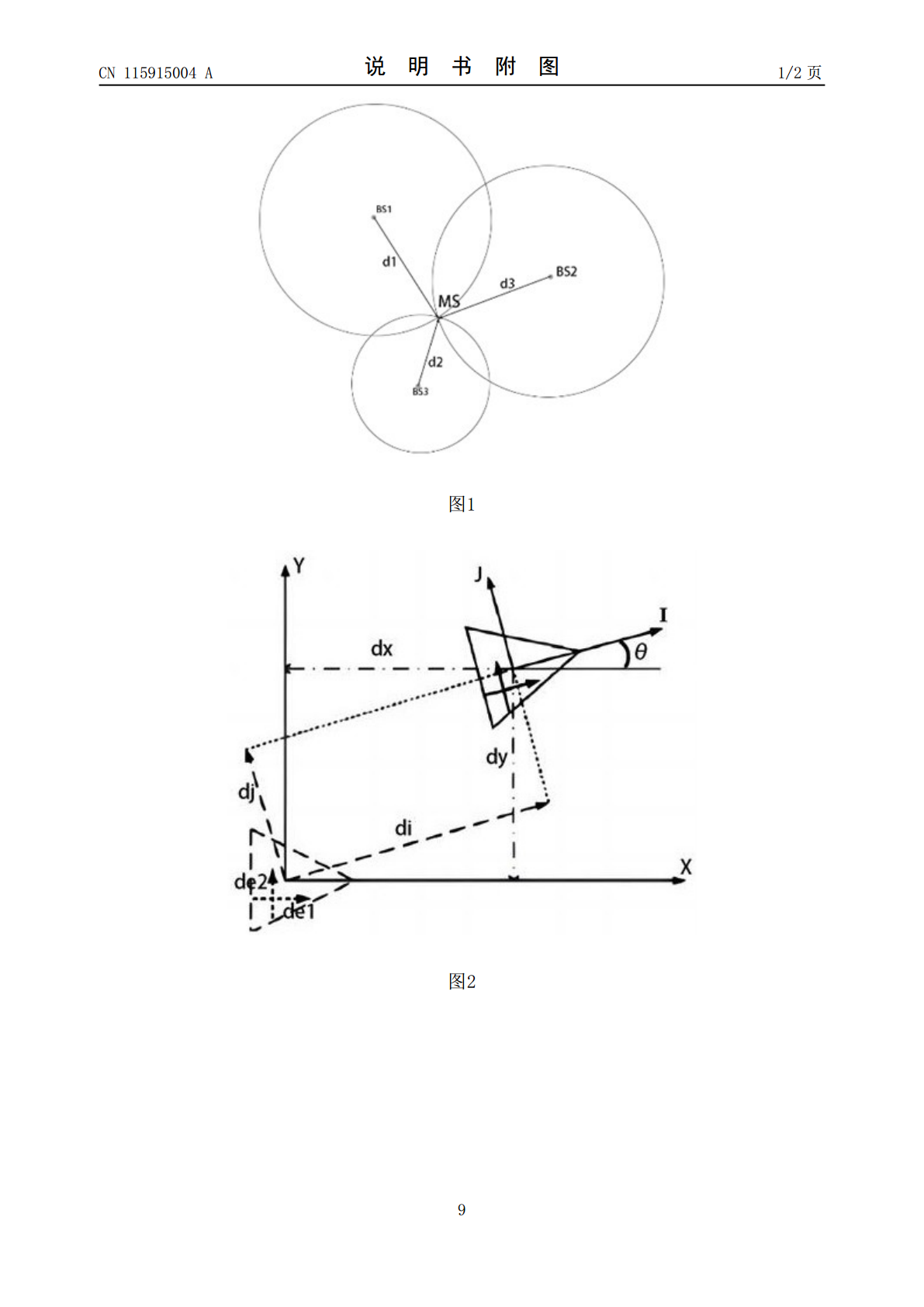
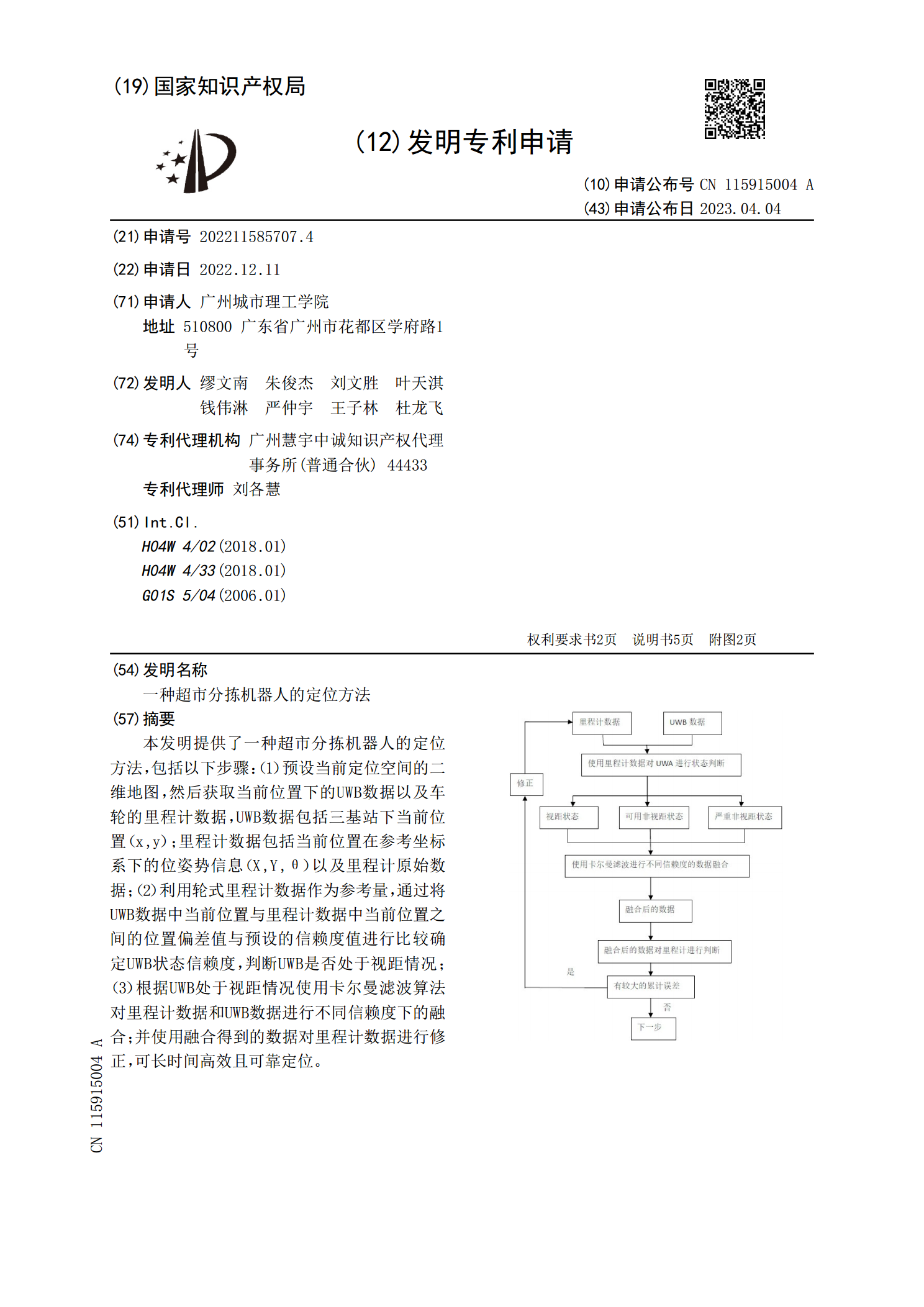
本发明提供了一种超市分拣机器人的定位方法,包括以下步骤:(1)预设当前定位空间的二维地图,然后获取当前位置下的UWB数据以及车轮的里程计数据,UWB数据包括三基站下当前位置(x,y);里程计数据包括当前位置在参考坐标系下的位姿势信息(X,Y,θ)以及里程计原始数据;(2)利用轮式里程计数据作为参考量,通过将UWB数据中当前位置与里程计数据中当前位置之间的位置偏差值与预设的信赖度值进行比较确定UWB状态信赖度,判断UWB是否处于视距情况;(3)根据UWB处于视距情况使用卡尔曼滤波算法对里程计数据和UWB数据

一种无人超市的分拣机器人.pdf
本发明公开了一种无人超市的分拣机器人,包括带有防撞感应系统的底框,所述底框的顶部固定连接有梳理箱,所述梳理箱的顶部固定安装带有摄像头的智能机械手,所述梳理箱的左侧固定安装有显示屏,所述梳理箱内壁的底部固定安装有驱动电机一,所述驱动电机一的输出端连接有螺纹杆,所述螺纹杆的表面螺纹连接有螺纹套板,所述螺纹套板的前侧固定连接有升降板。本发明通过上述等结构的配合,实现了进行不同类型货物的分拣梳理归纳工作,以及后续归纳完成货物的排出,同时具备购买物品的扫码记录以便后续付账打印清单小票,增加了分拣机器人的防撞防护效果
一种织物分拣机器人自主分拣方法.pdf
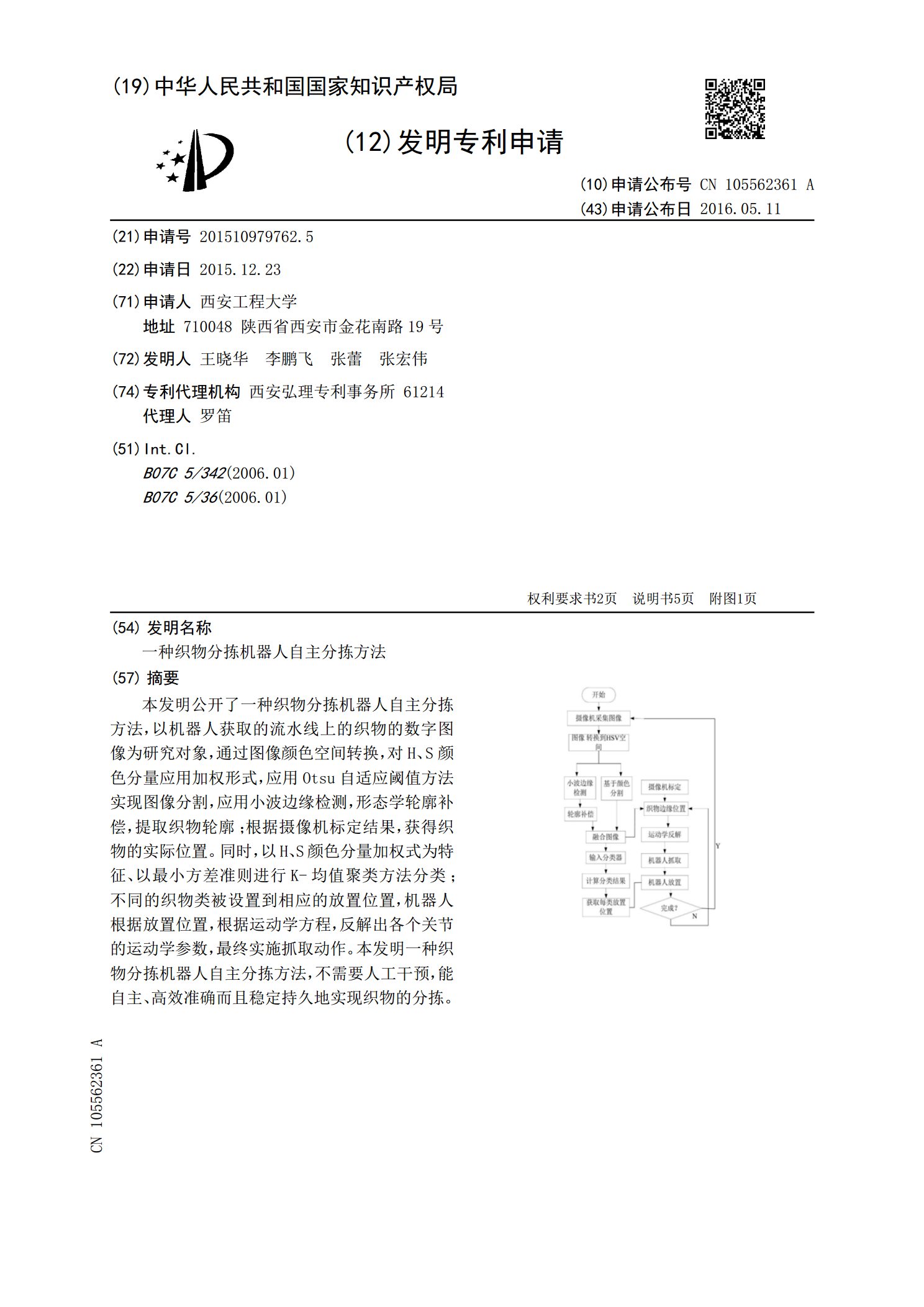
本发明公开了一种织物分拣机器人自主分拣方法,以机器人获取的流水线上的织物的数字图像为研究对象,通过图像颜色空间转换,对H、S颜色分量应用加权形式,应用Otsu自适应阈值方法实现图像分割,应用小波边缘检测,形态学轮廓补偿,提取织物轮廓;根据摄像机标定结果,获得织物的实际位置。同时,以H、S颜色分量加权式为特征、以最小方差准则进行K-均值聚类方法分类;不同的织物类被设置到相应的放置位置,机器人根据放置位置,根据运动学方程,反解出各个关节的运动学参数,最终实施抓取动作。本发明一种织物分拣机器人自主分拣方法,不需

分拣机器人以及分拣方法.pdf
本发明提供的一种分拣机器人以及分拣方法,包括移动底盘、分拣机构和暂存机构,分拣机构设置在移动底盘上,暂存机构设置在移动底盘上,并位于分拣机构竖直方向的上方,暂存机构至少包含沿竖直方向层叠分布的至少一层暂存平台,相邻暂存平台之间、以及最底层暂存平台与分拣机构之间均间隔出存放空间,每层暂存平台均具有可开启和关闭的落件口。在上述技术方案中,暂存机构的设置提供了整个分拣机器人的运载能力,在原有基础上携带更多的货品,分拣机器人可以在每个暂存平台上均存放货品,然后到达目的地后,通过按照顺序打开暂存平台的落件口,使货品

基于颜色特征的筒纱分拣机器人识别定位方法.docx
基于颜色特征的筒纱分拣机器人识别定位方法基于颜色特征的筒纱分拣机器人识别定位方法摘要:随着纺织行业的发展,筒纱的分拣工作变得越来越重要。为了提高分拣效率和准确度,本文提出了一种基于颜色特征的筒纱分拣机器人识别定位方法。首先,介绍了筒纱分拣机器人的背景和挑战;然后,详细阐述了颜色特征的提取和分析方法;然后,提出了一种基于颜色特征的识别定位算法;最后,通过实验验证了该方法的有效性和可行性,并进行了性能评估。实验结果表明,基于颜色特征的筒纱分拣机器人识别定位方法在分拣效率和准确度方面表现出了良好的性能。关键词: