
基于激光测距导航功能的建筑AGV底盘.pdf

羽沫****魔王

1/10

2/10

3/10

4/10
5/10
6/10

7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于激光测距导航功能的建筑AGV底盘.pdf
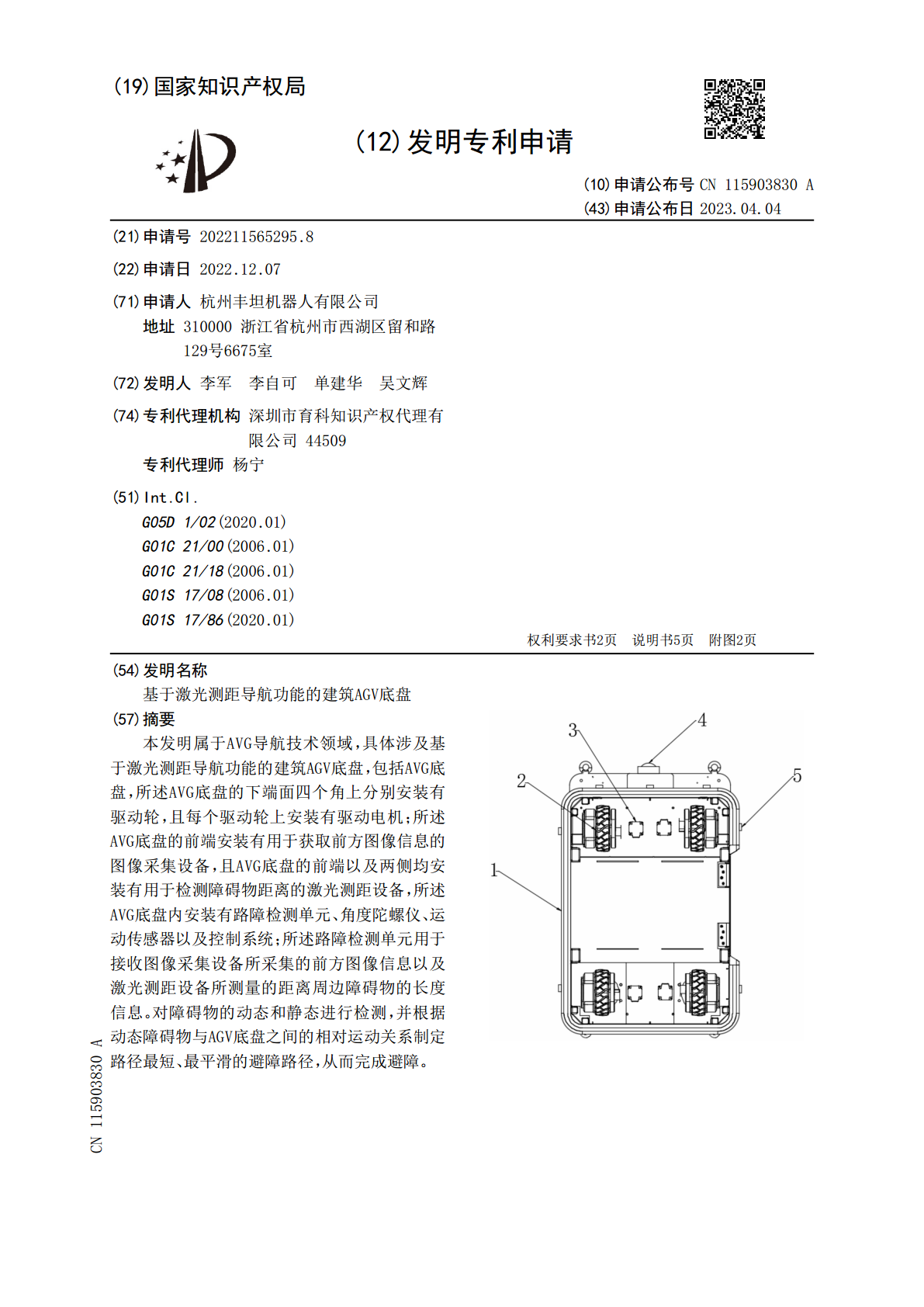
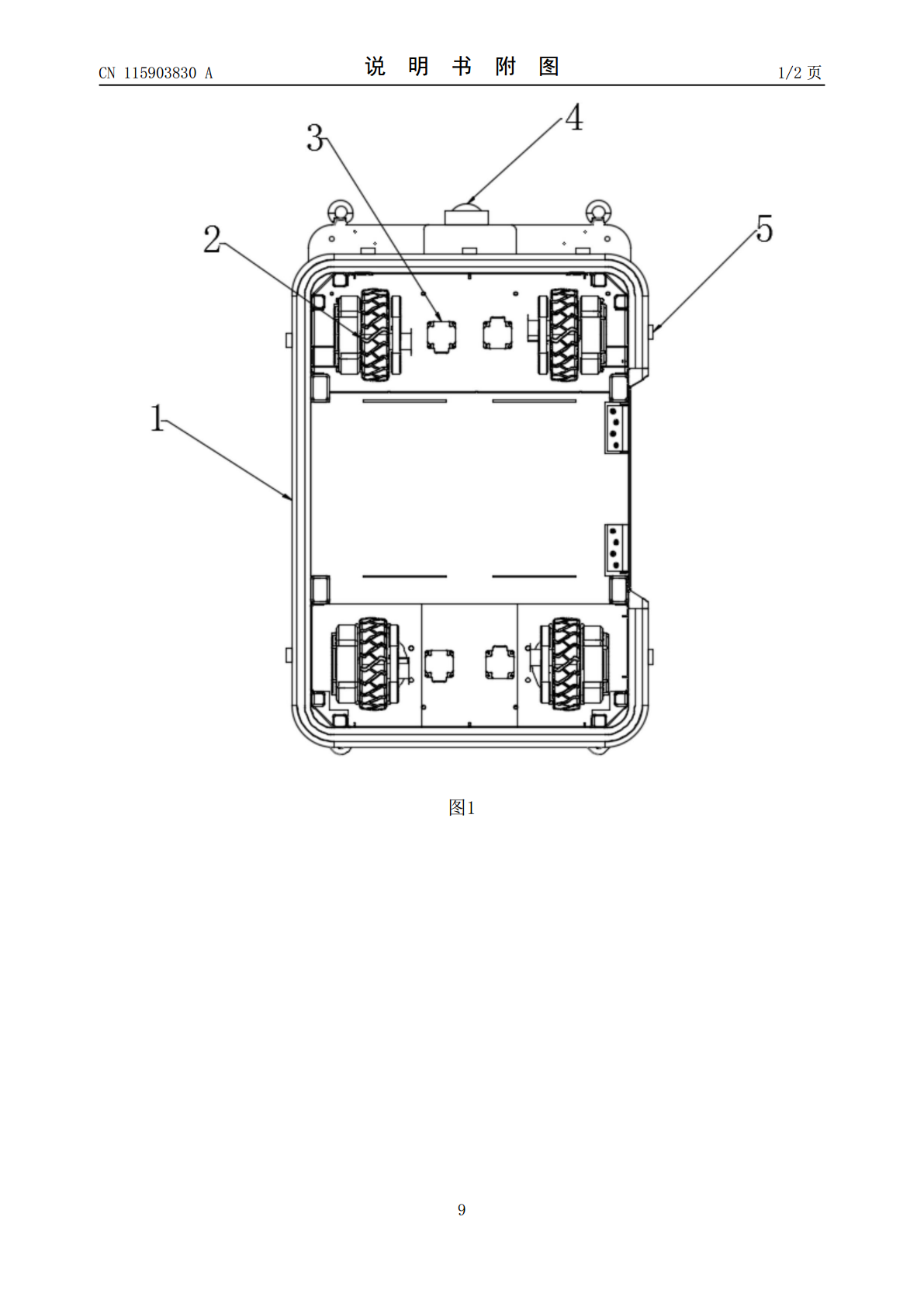
本发明属于AVG导航技术领域,具体涉及基于激光测距导航功能的建筑AGV底盘,包括AVG底盘,所述AVG底盘的下端面四个角上分别安装有驱动轮,且每个驱动轮上安装有驱动电机;所述AVG底盘的前端安装有用于获取前方图像信息的图像采集设备,且AVG底盘的前端以及两侧均安装有用于检测障碍物距离的激光测距设备,所述AVG底盘内安装有路障检测单元、角度陀螺仪、运动传感器以及控制系统;所述路障检测单元用于接收图像采集设备所采集的前方图像信息以及激光测距设备所测量的距离周边障碍物的长度信息。对障碍物的动态和静态进行检测,并
基于虚拟扫描与测距匹配的AGV激光SLAM方法.pdf
基于虚拟扫描与测距匹配的AGV激光SLAM方法,涉及移动机器人导航定位。栅格地图表示与创建方法;虚拟扫描与匹配定位方法;提高算法实时性的方法。采用轮廓外形遍历匹配的原理,在每一遍历位姿采用虚拟激光雷达对地图进行扫描,然后虚拟扫描的数据与当前激光雷达的数据直接进行比较,找出AGV机器人的最优位姿信息,再增量式构建地图。针对现有激光SLAM算法多数针对低精度传感器,其滤波、估计、优化的稳定性和定位精度无法绝对保证,难以达到工业AGV机器人应用要求的问题,可通过采用多GPU并行处理和改变虚拟测距的初始推进位置,

基于激光测距的手机解锁方法及具有激光测距功能的手机.pdf
本发明实施例提供了基于激光测距的手机解锁方法及具有激光测距功能的手机。所述手机解锁方法包括:激光发射器发射激光脉冲;激光接收器接收反射光,判定所述反射光的波长是否在预设波长范围内;若所述反射光的波长在所述预设波长范围内,则获得一个发送-接收周期的时长,并根据光速计算手机与接触表面的距离;将所述计算得到的手机与接触表面的距离与预设解锁距离进行比较,若所述计算得到的手机与接触表面的距离大于所述预设解锁距离,则发送解锁命令,解锁手机屏幕。本发明实施例的基于激光测距的手机解锁方法及具有激光测距功能的手机,大大提高

基于激光加惯性导航方式的重载AGV设计.docx
基于激光加惯性导航方式的重载AGV设计摘要:随着物流行业的发展,运载物的种类和规模不断增加,对自动化运输设备的需求也越来越高。重载AGV作为一种自动化运输设备,已经成为了物流行业的重要组成部分。本文研究了基于激光加惯性导航方式的重载AGV,以其为设计主题。首先,介绍了重载AGV和激光加惯性导航技术的基本概念和原理,以及现有的重载AGV的设计方案和技术难点。然后,设计了一种基于激光加惯性导航的重载AGV解决方案,并分析了方案的可行性和优点。最后,进行了设计实现和测试,并对实验结果进行了分析和总结。本文主要研

基于激光加惯性导航方式的重载AGV设计.pptx
,目录PartOnePartTwo激光加惯性导航方式简介重载AGV的应用场景重载AGV的设计要求PartThree激光导航原理激光雷达的选型与使用激光导航的优缺点PartFour惯性导航原理惯性导航系统的组成惯性导航的优缺点PartFive集成方案的设计与实现激光加惯性导航方式的互补性集成方案的测试与验证PartSix驱动系统设计转向系统设计承载系统设计安全保护系统设计PartSeven路径规划与导航控制运动控制策略任务调度与协同控制控制系统的稳定性与可靠性分析THANKS