
基于虚拟扫描与测距匹配的AGV激光SLAM方法.pdf

猫巷****觅蓉

1/10
2/10

3/10

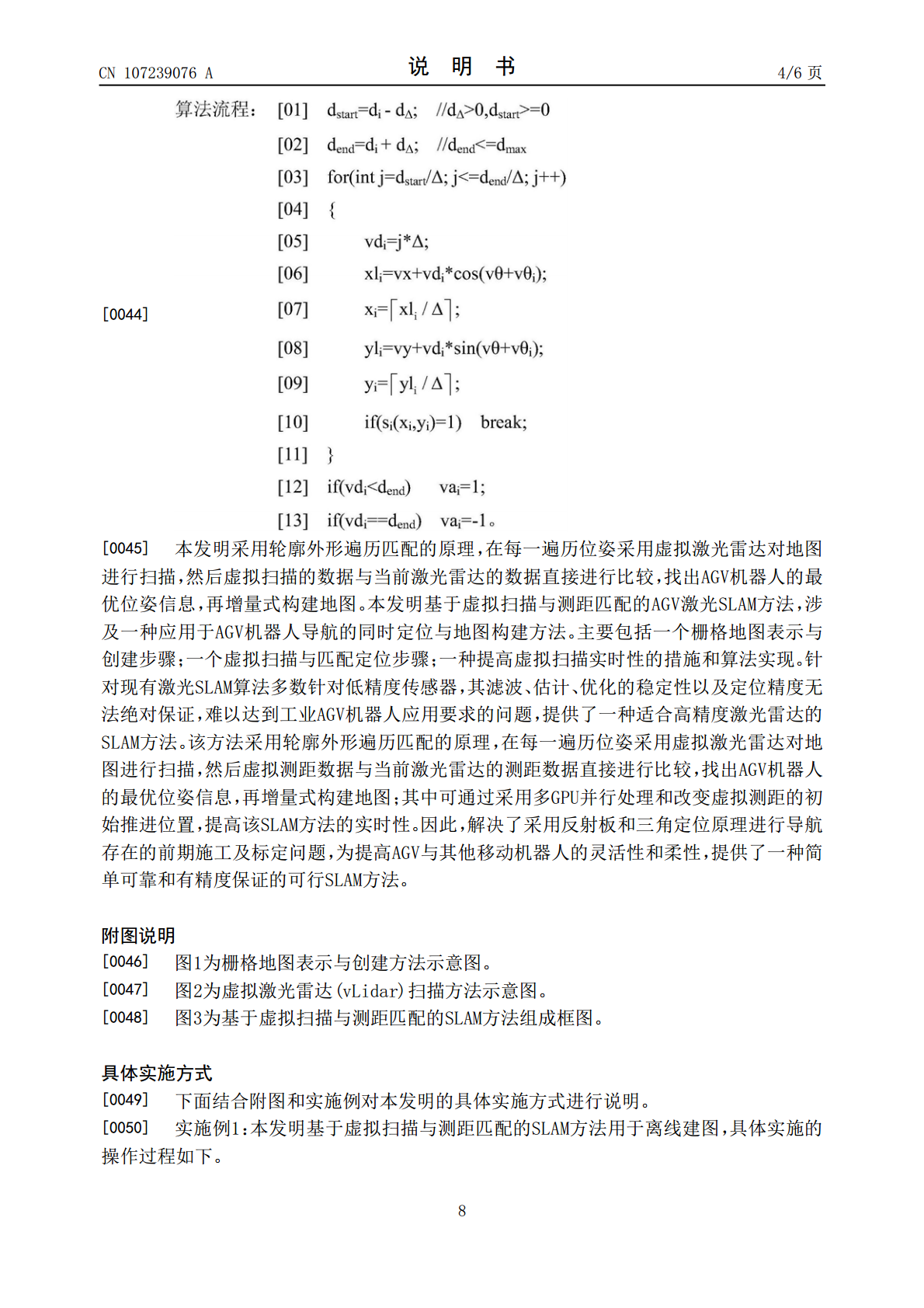
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于虚拟扫描与测距匹配的AGV激光SLAM方法.pdf
基于虚拟扫描与测距匹配的AGV激光SLAM方法,涉及移动机器人导航定位。栅格地图表示与创建方法;虚拟扫描与匹配定位方法;提高算法实时性的方法。采用轮廓外形遍历匹配的原理,在每一遍历位姿采用虚拟激光雷达对地图进行扫描,然后虚拟扫描的数据与当前激光雷达的数据直接进行比较,找出AGV机器人的最优位姿信息,再增量式构建地图。针对现有激光SLAM算法多数针对低精度传感器,其滤波、估计、优化的稳定性和定位精度无法绝对保证,难以达到工业AGV机器人应用要求的问题,可通过采用多GPU并行处理和改变虚拟测距的初始推进位置,

基于全局优化匹配的激光SLAM方法研究.docx
基于全局优化匹配的激光SLAM方法研究Title:ResearchonLaserSLAMMethodBasedonGlobalOptimizationMatchAbstract:SimultaneousLocalizationandMapping(SLAM)isacrucialtechniqueinautonomousnavigationsystemsandrobotics.LaserSLAM,whichutilizeslaserrangefinderstoextractenvironmentinform

基于扫描技术的虚拟匹配的激光焊接匹配尺寸标准研究.pptx
基于扫描技术的虚拟匹配的激光焊接匹配尺寸标准研究目录添加目录项标题研究背景和意义激光焊接技术的发展现状虚拟匹配技术在激光焊接中的应用尺寸标准在激光焊接中的重要性研究目的和意义基于扫描技术的虚拟匹配原理扫描技术的基本原理虚拟匹配的实现过程激光焊接过程中尺寸标准的确定虚拟匹配的精度和可靠性分析实验设计和方法实验设备和材料实验方法和步骤数据采集和处理实验结果分析和讨论结果分析和讨论实验结果展示结果分析和解释误差来源和不确定性分析结果与现有技术的比较和讨论结论和建议研究结论总结研究成果的应用前景和建议对未来研究的

基于全局优化匹配的激光SLAM方法研究的任务书.docx
基于全局优化匹配的激光SLAM方法研究的任务书一、任务背景在机器人技术的发展中,激光SLAM(SimultaneousLocalizationandMapping)技术是一项非常重要的技术之一。它能够利用机器人上的激光测距仪来构建环境地图,并在同时确定机器人当前的位置。在实际的应用中,激光SLAM技术已经得到了广泛的应用,如无人驾驶车辆、室内机器人等。然而,当机器人在未知环境下进行导航时,由于环境的复杂性和传感器的噪声等因素,激光SLAM技术仍然存在许多挑战。在不同时间和位置的激光扫描数据之间的匹配问题是
基于激光测距导航功能的建筑AGV底盘.pdf
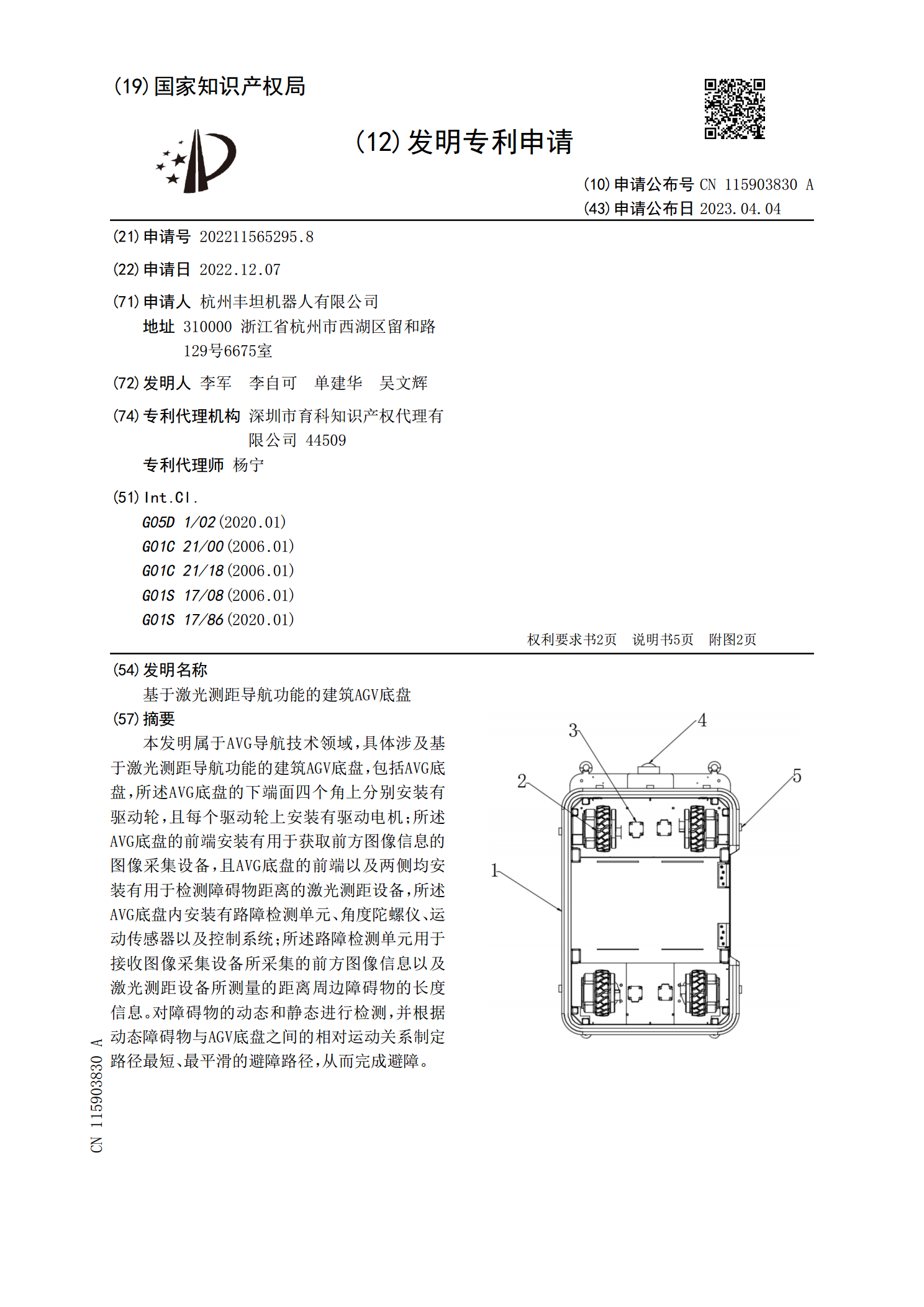
本发明属于AVG导航技术领域,具体涉及基于激光测距导航功能的建筑AGV底盘,包括AVG底盘,所述AVG底盘的下端面四个角上分别安装有驱动轮,且每个驱动轮上安装有驱动电机;所述AVG底盘的前端安装有用于获取前方图像信息的图像采集设备,且AVG底盘的前端以及两侧均安装有用于检测障碍物距离的激光测距设备,所述AVG底盘内安装有路障检测单元、角度陀螺仪、运动传感器以及控制系统;所述路障检测单元用于接收图像采集设备所采集的前方图像信息以及激光测距设备所测量的距离周边障碍物的长度信息。对障碍物的动态和静态进行检测,并