
基于视觉引导的机械臂抓取系统研究的开题报告.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于视觉引导的机械臂抓取系统研究的开题报告.docx
基于视觉引导的机械臂抓取系统研究的开题报告一、选题背景及意义随着机器人技术的不断发展,机械臂在工业、医疗、服务等领域的应用越来越广泛。机械臂抓取系统是机械臂中非常重要的一项核心技术,其作用主要是完成对物体的精准抓取。传统的机械臂抓取系统大多采用基于位置和力的控制方法,这些方法需要精细的图像定位和模型匹配。而现在随着计算机视觉技术的飞速发展,基于视觉引导的机械臂抓取系统正逐渐成为研究热点。其主要特点是利用深度学习和计算机视觉技术,通过分析物体表面的关键特征点进行判断,从而实现物体的定位、抓取和放置。基于视觉

基于视觉引导的机械臂抓取系统研究.docx
基于视觉引导的机械臂抓取系统研究基于视觉引导的机械臂抓取系统研究摘要:近年来,随着机器视觉技术的不断发展和应用需求的增加,视觉引导的机械臂抓取系统逐渐成为研究的热点。本文以视觉引导的机械臂抓取系统为研究对象,结合现有技术和方法进行综述和分析,并提出了一种基于视觉引导的机械臂抓取系统的实现方案。研究结果表明,基于视觉引导的机械臂抓取系统具有较高的准确性和灵活性,可以广泛应用于制造业、仓储物流、医疗等领域,并具有很大的研究和应用价值。关键词:机械臂;抓取系统;视觉引导;准确性;灵活性1.引言机械臂是一种能够模

基于视觉的机械臂抓取研究的开题报告.docx
基于视觉的机械臂抓取研究的开题报告摘要:机器人抓取技术是机器人学中的重要研究方向,其应用范围广泛,可用于制造业、服务业等不同领域。其中,基于视觉的机械臂抓取技术在未来的自动化制造中具有很大的潜力。本文首先介绍了机器人抓取技术的研究背景和意义,然后详细介绍了基于视觉的机械臂抓取技术的原理和发展现状,接着分析当前存在的问题和挑战,最后提出了未来的研究方向。关键词:机器人,抓取,视觉,机械臂一、研究背景和意义机器人技术是当今科技领域最热门的研究方向之一,机器人的应用越来越广泛,其中机械臂作为机器人的重要组成部分
基于视觉引导机械臂抓取炉具的方法.pdf
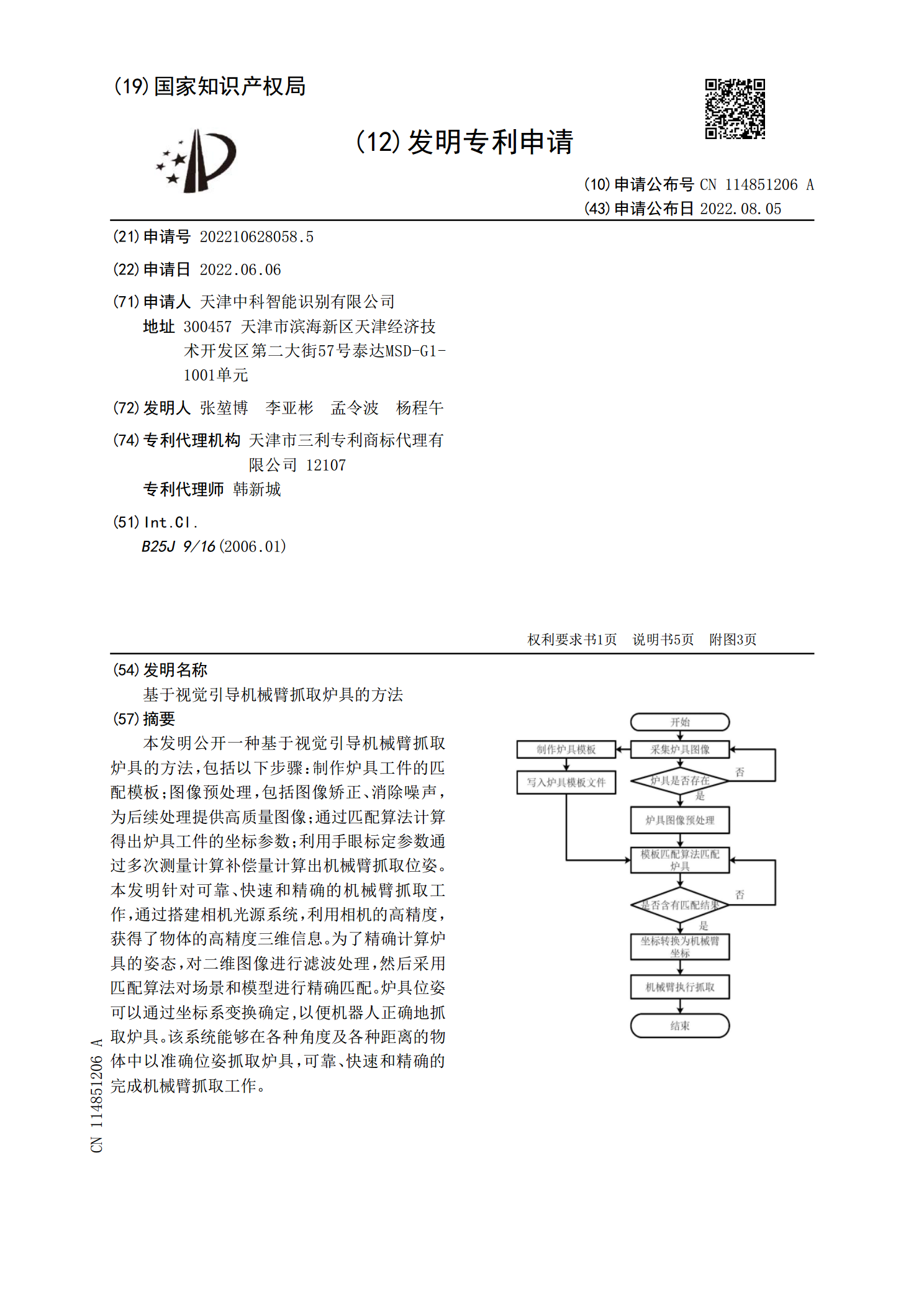
本发明公开一种基于视觉引导机械臂抓取炉具的方法,包括以下步骤:制作炉具工件的匹配模板;图像预处理,包括图像矫正、消除噪声,为后续处理提供高质量图像;通过匹配算法计算得出炉具工件的坐标参数;利用手眼标定参数通过多次测量计算补偿量计算出机械臂抓取位姿。本发明针对可靠、快速和精确的机械臂抓取工作,通过搭建相机光源系统,利用相机的高精度,获得了物体的高精度三维信息。为了精确计算炉具的姿态,对二维图像进行滤波处理,然后采用匹配算法对场景和模型进行精确匹配。炉具位姿可以通过坐标系变换确定,以便机器人正确地抓取炉具。该
一种基于平面视觉引导机械臂的抓取方法.pdf
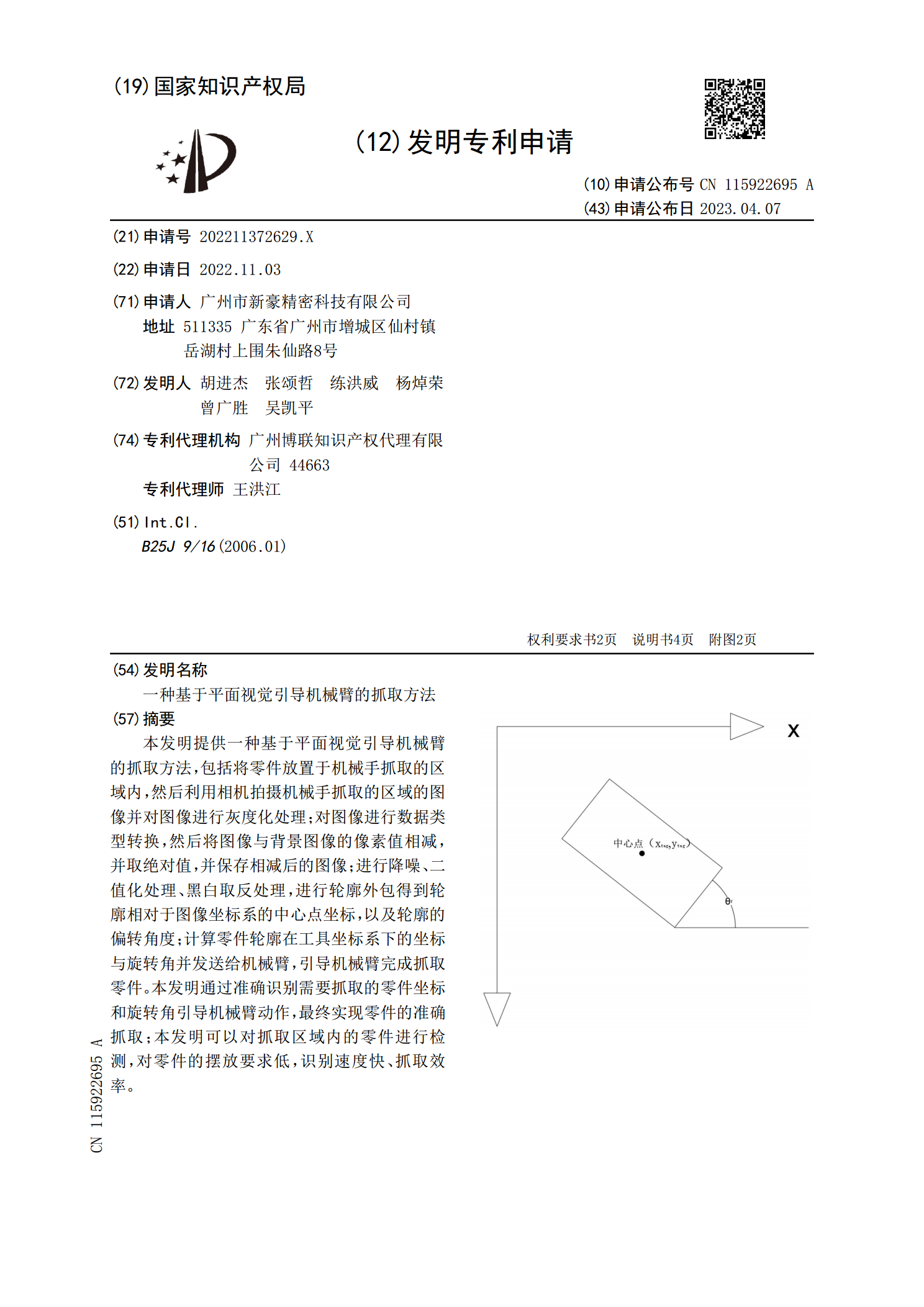
本发明提供一种基于平面视觉引导机械臂的抓取方法,包括将零件放置于机械手抓取的区域内,然后利用相机拍摄机械手抓取的区域的图像并对图像进行灰度化处理;对图像进行数据类型转换,然后将图像与背景图像的像素值相减,并取绝对值,并保存相减后的图像;进行降噪、二值化处理、黑白取反处理,进行轮廓外包得到轮廓相对于图像坐标系的中心点坐标,以及轮廓的偏转角度;计算零件轮廓在工具坐标系下的坐标与旋转角并发送给机械臂,引导机械臂完成抓取零件。本发明通过准确识别需要抓取的零件坐标和旋转角引导机械臂动作,最终实现零件的准确抓取;本发