
绳索牵引机器人的控制.pdf

文库****品店


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

绳索牵引机器人的控制.pdf
上海交通大学第25期PRP学生研究论文摘要多足步行机器人在民用、工业、国防中具有重要应用价值,伺服控制技术是其中的关键技术。本项目研究了机器人的柔顺力控制,设计并搭建了模拟实验台,通过编程使嵌入式PC向驱动器发送指令进而控制两个伺服电机转动,根据传感器反馈的数据调节电机转动速度,通过调节两电机转速使连线张力逐渐达到预设值的算法并对实验结果进行了分析和总结。关键词:机器人,伺服电机,柔顺力,控制ABSTRACTMultileggedwalkingrobotshaveimportantapplicationv

绳索牵引控制方法.pdf
本发明公开了一种对绳索的牵引控制的方法。属物体的起重、牵引控制领域。该装置包括大滑轮、小滑轮、齿轮联动。齿轮变速和压紧装置,将绳索放到滑轮上利用绳索的柔软特性,由多个压力滑轮对绳索挤压。大、小齿轮同步转动,牵引绳索。完成对物品的牵引任务。
一种绳索牵引并联机器人的绳索共面装置.pdf
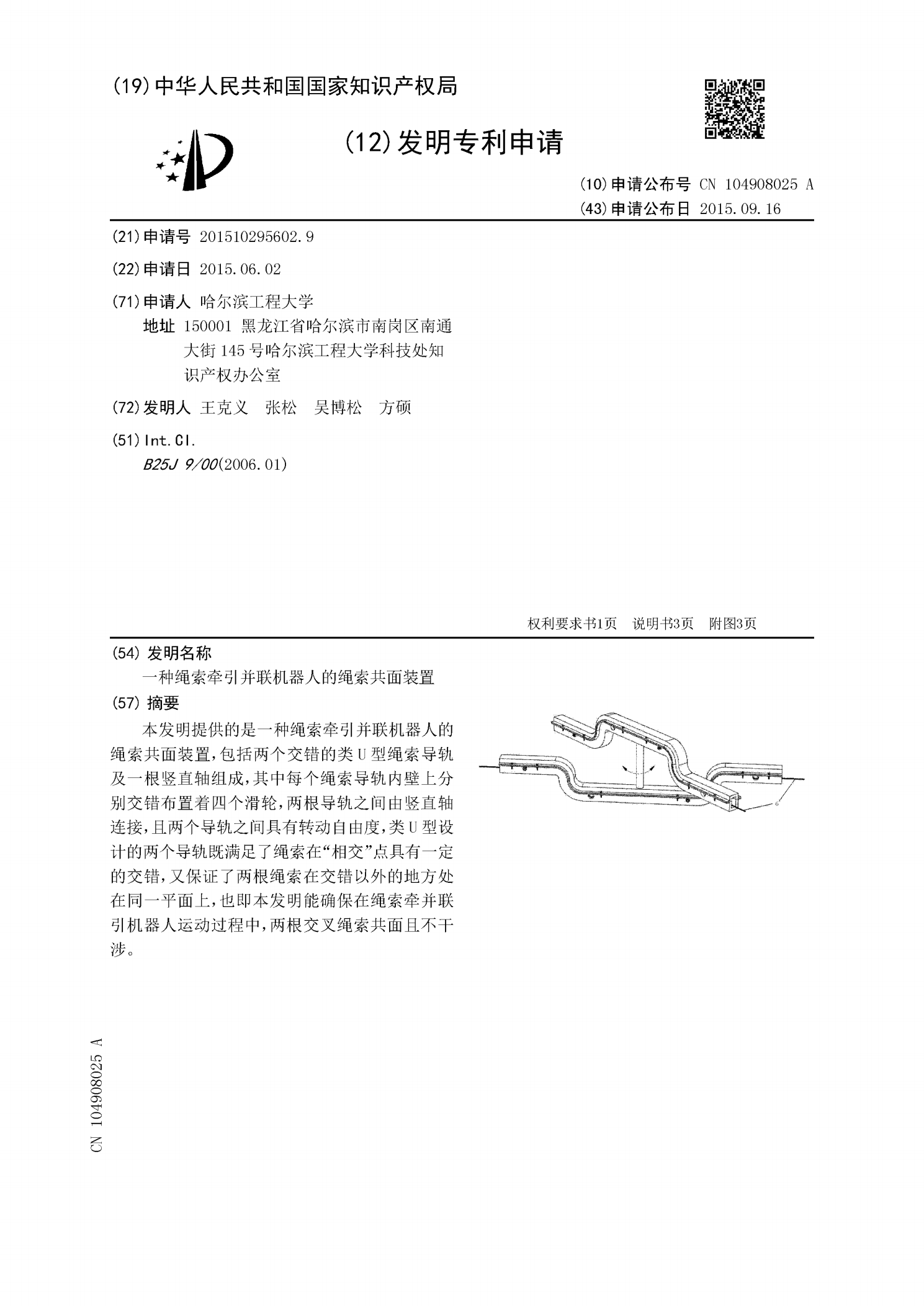
本发明提供的是一种绳索牵引并联机器人的绳索共面装置,包括两个交错的类U型绳索导轨及一根竖直轴组成,其中每个绳索导轨内壁上分别交错布置着四个滑轮,两根导轨之间由竖直轴连接,且两个导轨之间具有转动自由度,类U型设计的两个导轨既满足了绳索在“相交”点具有一定的交错,又保证了两根绳索在交错以外的地方处在同一平面上,也即本发明能确保在绳索牵并联引机器人运动过程中,两根交叉绳索共面且不干涉。

绳索牵引骨盆运动控制康复机器人研究的综述报告.docx
绳索牵引骨盆运动控制康复机器人研究的综述报告近年来,随着人口老龄化和生活方式的改变,各种慢性病和运动损伤在人群中出现的越来越多。骨盆运动失衡是导致许多疾病和运动受限的主要原因之一。运动康复机器人是一种有效的康复手段,可以协助患者进行康复训练。在该领域中,绳索牵引骨盆运动控制康复机器人已成为当前的重要研究方向之一。绳索牵引骨盆运动控制康复机器人,是一种利用绳索牵引力控制机器人运动的康复机器人。通过绳索牵引力的作用,机器人可以模拟正常受试者的运动过程,达到康复目的。该机器人可以探测受试者的骨盆运动状况,提供恰

基于高速视觉的绳索牵引并联机器人轨迹跟踪控制.docx
基于高速视觉的绳索牵引并联机器人轨迹跟踪控制基于高速视觉的绳索牵引并联机器人轨迹跟踪控制摘要:随着机器人技术的进步,越来越多的应用场景要求机器人能够在特定路径上进行精准的轨迹跟踪控制。而在某些环境中,传统的基于传感器和反馈控制的方法可能会受到限制。本文提出了一种基于高速视觉的绳索牵引并联机器人轨迹跟踪控制方法,通过使用高速视觉传感器实时获取并处理运动轨迹信息,实现机器人的高精度跟踪控制。实验结果表明,该方法能够有效地提高机器人的轨迹跟踪性能,并且在某些复杂环境中具有较好的应用前景。关键词:视觉传感器、绳索