
自动驾驶汽车横向运动控制方法综述.pdf

文库****品店


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

自动驾驶汽车横向运动控制方法综述.pdf
自动驾驶汽车横向运动控制方法综述高琳琳;戎辉;唐风敏;郭篷;何佳【期刊名称】《《汽车电器》》【年(卷),期】2019(000)009【总页数】4页(P1-4)【关键词】自动驾驶;横向运动控制;纵/横向耦合;车联网【作者】高琳琳;戎辉;唐风敏;郭篷;何佳【作者单位】天津大学天津300072;中汽研(天津)汽车工程研究院有限公司天津300300;中国汽车技术研究中心有限公司天津300300【正文语种】中文【中图分类】U463.6自动驾驶汽车是一种集感知、决策、控制于一体的智能化系统,其被视为交通安全事故、交通

基于MPC的自动驾驶汽车横向控制算法研究.docx
基于MPC的自动驾驶汽车横向控制算法研究自动驾驶汽车是一种新型的交通工具,其能够在没有驾驶员的情况下,在道路上实现安全行驶。自动驾驶汽车的核心控制算法是横向和纵向控制算法。本文主要研究自动驾驶汽车的横向控制算法,采用基于MPC的横向控制算法。自动驾驶汽车横向控制算法研究一.MPC控制算法的基本原理MPC(ModelPredictiveControl)是一种模型预测控制算法,其主要通过优化一个预测模型来计算控制变量,从而为自动驾驶汽车提供精确的控制信号。MPC控制算法的基本流程如下:1.预测模型的建立:在横
车辆自动驾驶的横向控制方法和控制装置、车辆.pdf
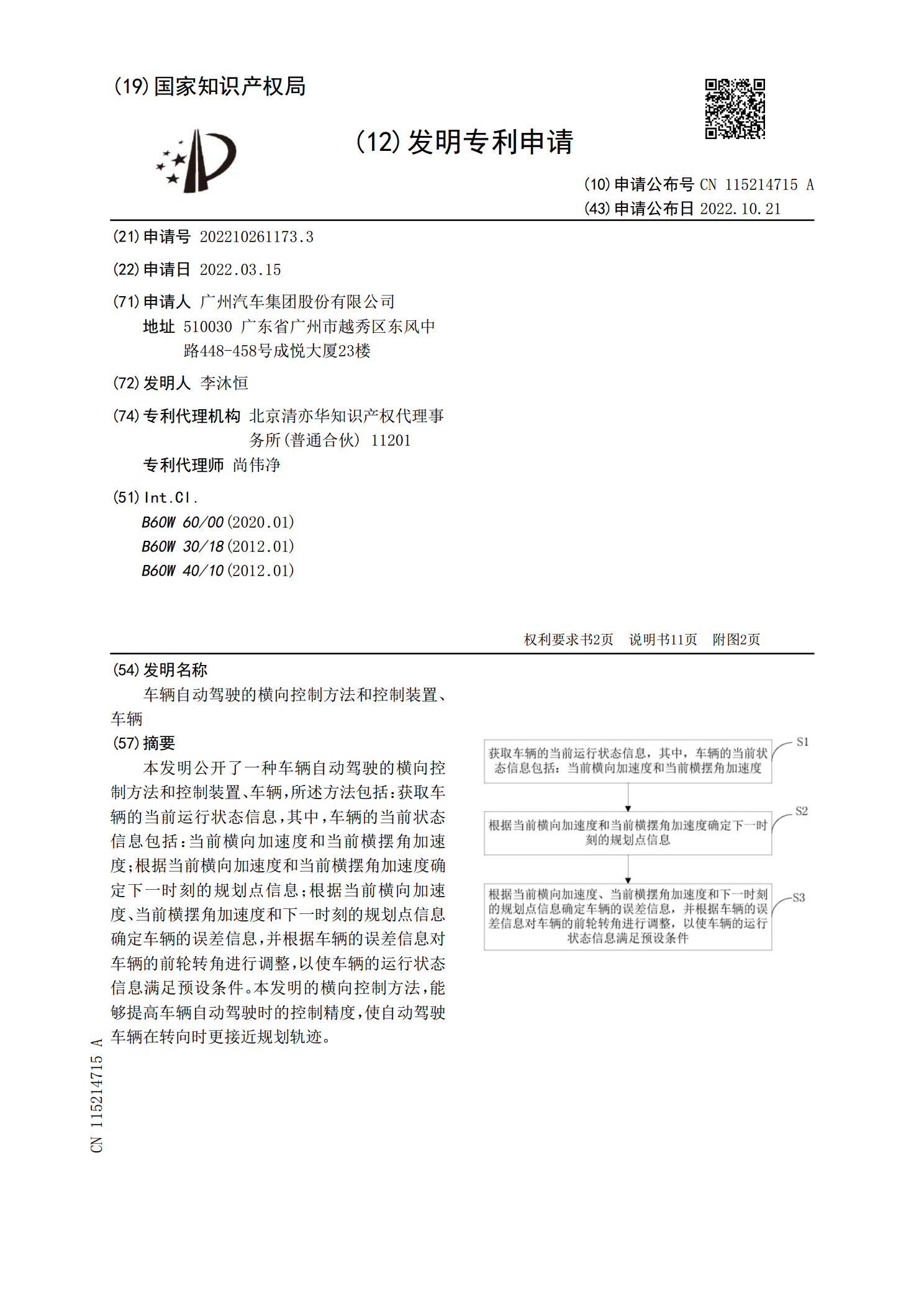
本发明公开了一种车辆自动驾驶的横向控制方法和控制装置、车辆,所述方法包括:获取车辆的当前运行状态信息,其中,车辆的当前状态信息包括:当前横向加速度和当前横摆角加速度;根据当前横向加速度和当前横摆角加速度确定下一时刻的规划点信息;根据当前横向加速度、当前横摆角加速度和下一时刻的规划点信息确定车辆的误差信息,并根据车辆的误差信息对车辆的前轮转角进行调整,以使车辆的运行状态信息满足预设条件。本发明的横向控制方法,能够提高车辆自动驾驶时的控制精度,使自动驾驶车辆在转向时更接近规划轨迹。
一种自动驾驶横向控制的处理方法.pdf
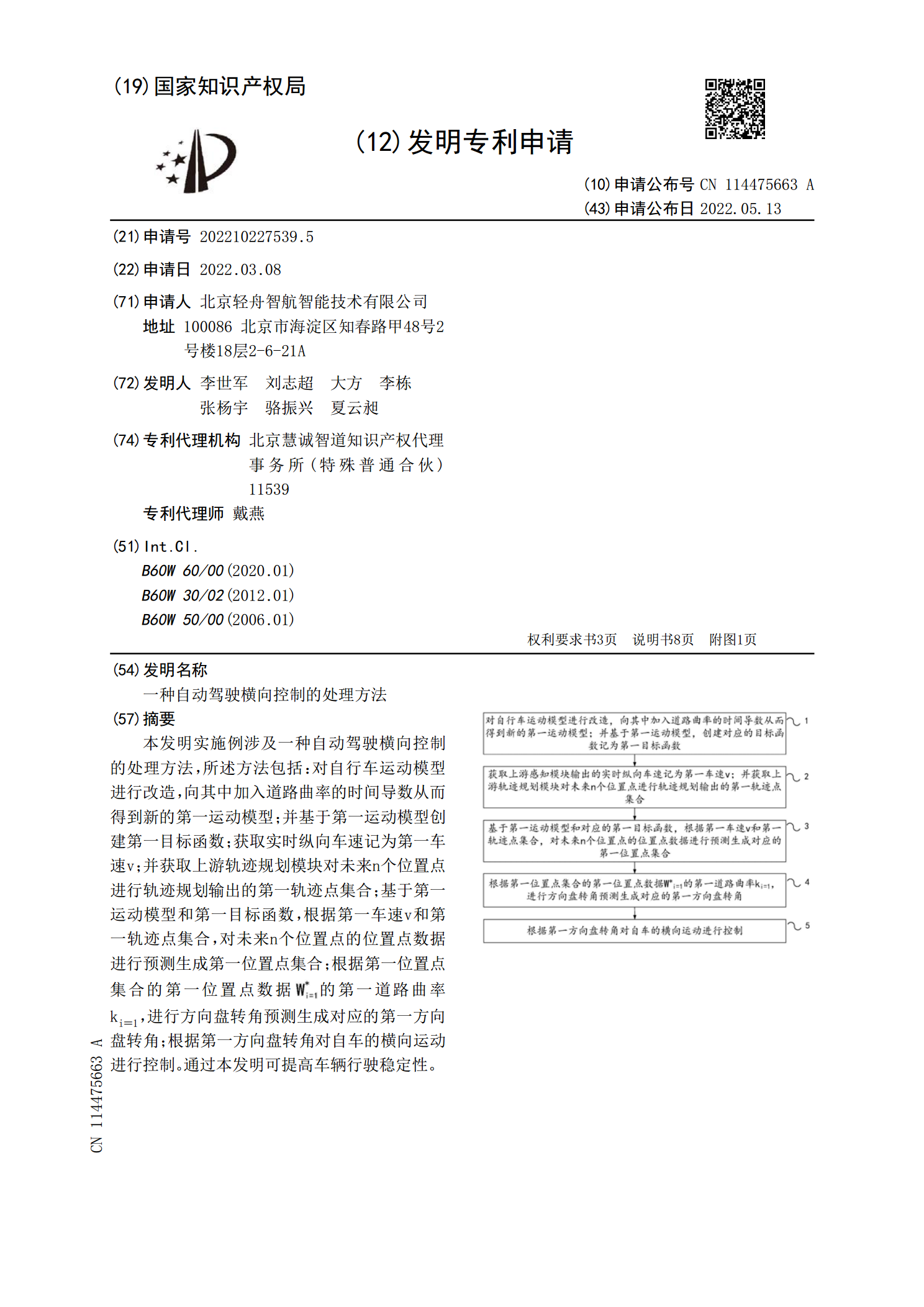
本发明实施例涉及一种自动驾驶横向控制的处理方法,所述方法包括:对自行车运动模型进行改造,向其中加入道路曲率的时间导数从而得到新的第一运动模型;并基于第一运动模型创建第一目标函数;获取实时纵向车速记为第一车速v;并获取上游轨迹规划模块对未来n个位置点进行轨迹规划输出的第一轨迹点集合;基于第一运动模型和第一目标函数,根据第一车速v和第一轨迹点集合,对未来n个位置点的位置点数据进行预测生成第一位置点集合;根据第一位置点集合的第一位置点数据<base:Imagehe=@69@wi=@82@file=@DDA000

自动驾驶充电车精准泊车的横向控制方法.pdf
本发明涉及一种自动驾驶充电车精准泊车的横向控制方法及装置,方法包括:自动驾驶充电车获取路径规划信息;根据自动驾驶充电车的行驶速度实时获取车辆行驶过程中的预瞄距离;根据路径起点位置和路径终点位置计算行驶路径的剩余距离;当剩余距离小于预瞄距离时,计算预瞄距离和剩余距离的距离差值;根据多个路点位置与路径终点位置计算路径航向角;根据距离差值和路径航向角对行驶路径进行延长处理,得到延长路径;根据路径起点位置和延长路径的终点位置计算车辆转弯半径;根据车辆转弯半径和车辆前后轮轴距计算车轮转角;根据车轮转角生成横向控制信