
一种自动驾驶横向控制的处理方法.pdf

Do****76


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种自动驾驶横向控制的处理方法.pdf
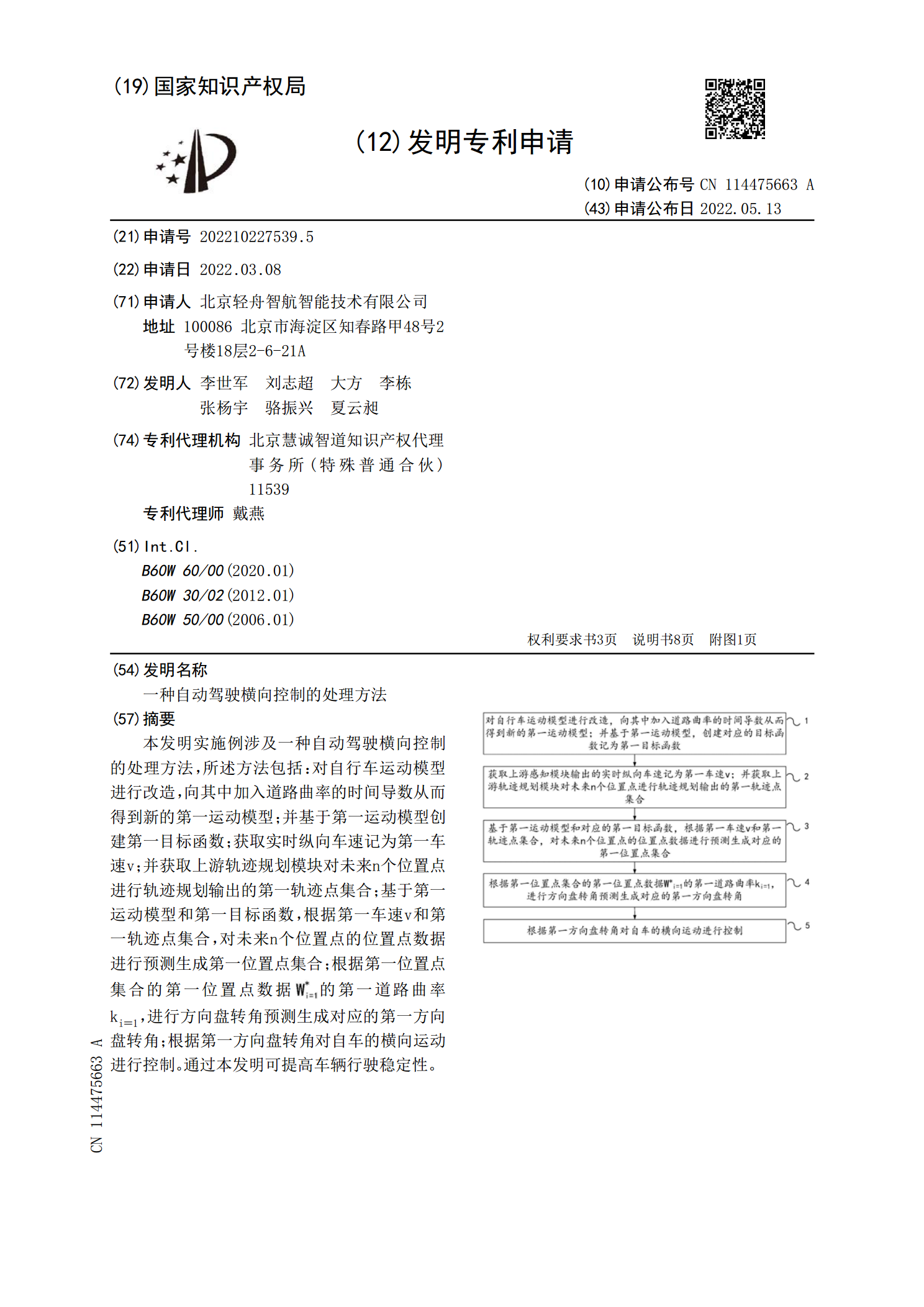
本发明实施例涉及一种自动驾驶横向控制的处理方法,所述方法包括:对自行车运动模型进行改造,向其中加入道路曲率的时间导数从而得到新的第一运动模型;并基于第一运动模型创建第一目标函数;获取实时纵向车速记为第一车速v;并获取上游轨迹规划模块对未来n个位置点进行轨迹规划输出的第一轨迹点集合;基于第一运动模型和第一目标函数,根据第一车速v和第一轨迹点集合,对未来n个位置点的位置点数据进行预测生成第一位置点集合;根据第一位置点集合的第一位置点数据<base:Imagehe=@69@wi=@82@file=@DDA000

一种车辆自动驾驶横向控制方法及系统.pdf
本发明提供了一种车辆自动驾驶横向控制方法及系统,涉及自动驾驶技术领域,包括:通过摄像头识别出车道中心线,拟合出车道中心线三阶曲线方程;同时读取车辆行驶信息,车辆行驶信息包括车速V、横摆加速度yawrate以及方向盘角度;根据读取的所述车辆行驶信息与拟合的所述三阶曲线方程,计算得到车辆的前轮转角α;最后基于前轮转角α与方向盘角度呈线性关系,转换得到方向盘转角度β,通过EPS控制器执行所述方向盘转角度β,车辆进入自动驾驶状态。通过本发明简化了车辆自动驾驶横向控制算法,不再需要过多标定参数,使用较小计算内存,便
一种车辆横向控制方法、装置及自动驾驶车辆.pdf
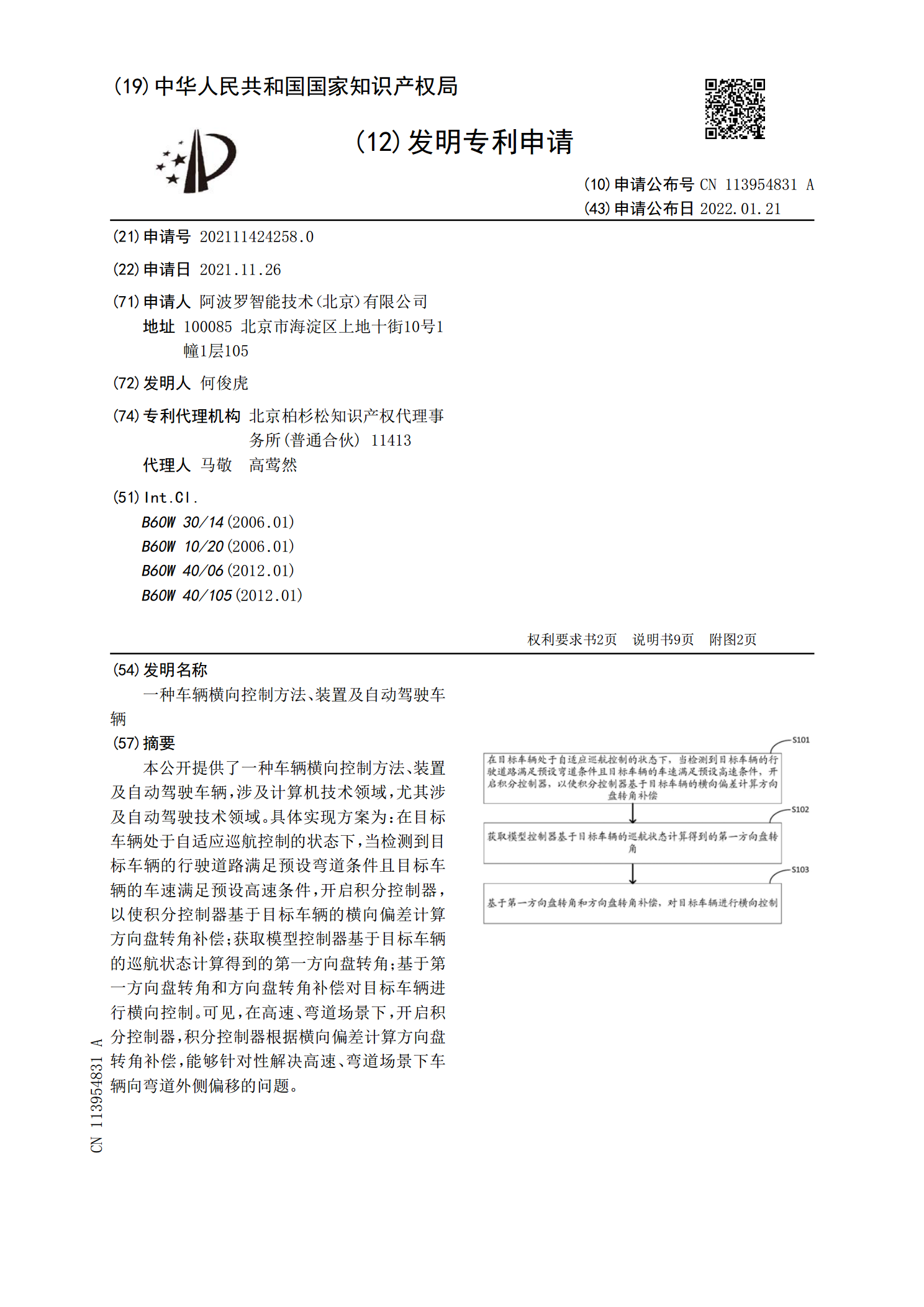
本公开提供了一种车辆横向控制方法、装置及自动驾驶车辆,涉及计算机技术领域,尤其涉及自动驾驶技术领域。具体实现方案为:在目标车辆处于自适应巡航控制的状态下,当检测到目标车辆的行驶道路满足预设弯道条件且目标车辆的车速满足预设高速条件,开启积分控制器,以使积分控制器基于目标车辆的横向偏差计算方向盘转角补偿;获取模型控制器基于目标车辆的巡航状态计算得到的第一方向盘转角;基于第一方向盘转角和方向盘转角补偿对目标车辆进行横向控制。可见,在高速、弯道场景下,开启积分控制器,积分控制器根据横向偏差计算方向盘转角补偿,能够

一种自动驾驶车辆的横向冗余控制方法和系统.pdf
本发明提供了一种自动驾驶车辆的横向冗余控制方法,包括:基于目标纵向加速度和目标横摆角速度分别计算车辆的总目标纵向力和目标横摆力矩;基于实际纵向加速度和实际横向加速度计算每个车轮的极限纵向力估计值;根据所计算的总目标纵向力、目标横摆力矩和极限纵向力估计值构建目标函数,以及根据所述极限纵向力估计值和车辆的当前最大驱动力构建约束规则;对所构建的目标函数和约束规则进行求解,得到每个车轮的目标纵向力;基于所得到的每个车轮的目标纵向力确定需求的总驱动力和每个车轮所需求的制动力;基于所确定的总驱动力和每个车轮所需求的制

自动驾驶汽车横向运动控制方法综述.pdf
自动驾驶汽车横向运动控制方法综述高琳琳;戎辉;唐风敏;郭篷;何佳【期刊名称】《《汽车电器》》【年(卷),期】2019(000)009【总页数】4页(P1-4)【关键词】自动驾驶;横向运动控制;纵/横向耦合;车联网【作者】高琳琳;戎辉;唐风敏;郭篷;何佳【作者单位】天津大学天津300072;中汽研(天津)汽车工程研究院有限公司天津300300;中国汽车技术研究中心有限公司天津300300【正文语种】中文【中图分类】U463.6自动驾驶汽车是一种集感知、决策、控制于一体的智能化系统,其被视为交通安全事故、交通