
电机学课件--直流电念头的电力拖动[资料].ppt

yy****24


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共49页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

电机学课件--直流电念头的电力拖动[资料].ppt
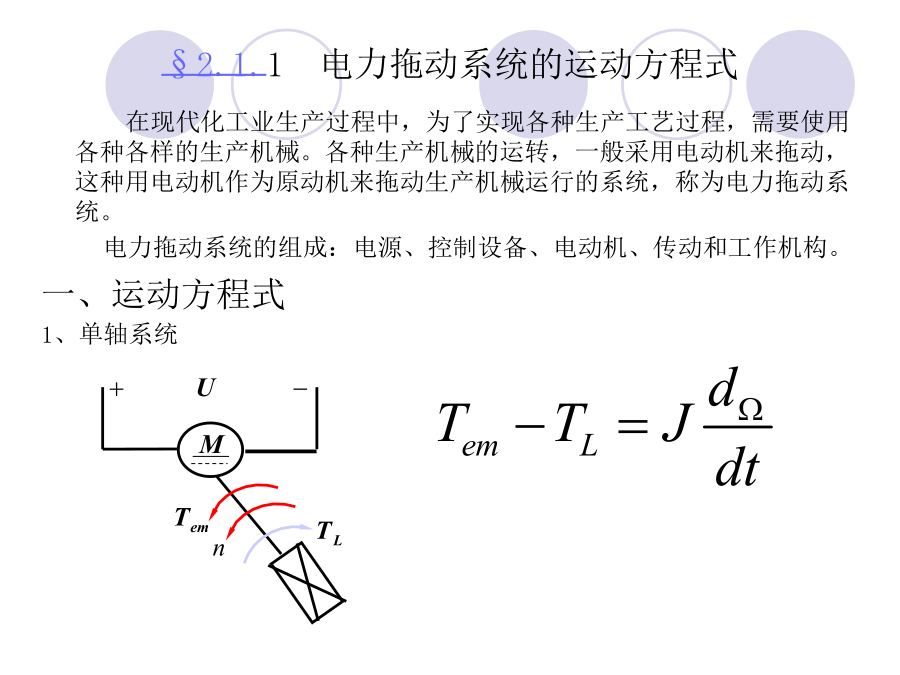
第2章直流电动机的电力拖动§2.1§2.1.1电力拖动系统的运动方程式2、实用表达式通常将转动惯量J用飞轮矩GD2来表示,它们之间的关系为J=mp式中m与G-转动部分的质量与重量;p与D-惯性半径与直径(m);g=9.81m/s2-重力加速度;再将机械角速度用转速n表示可得:3、系统旋转运动的三种状态二、运动方程式中转矩正、负号的规定§2.1.2负载的转矩特性1.反抗性恒转距负载特性特点:TL的大小恒定不变,方向总是与运动方向相反。负载转矩特性在第一和第三象限,如图2.1所示,例如金属的压延,机床的平移机

电机学课件--直流电念头单相异步电念头步进电机[资料].ppt
海南风光第七章电动机7.2.1概述7.2.2工作原理注意:换向片和电源固定联接,线圈无论怎样转动,总是上半边的电流向里,下半边的电流向外。电刷压在换向片上。F直流发电机二、直流电机的构成1.转子(又称电枢)由铁芯、绕组(线圈)、换向器组成。根据励磁线圈和转子绕组的联接关系,励磁式的直流电机又可细分为:7.2.3电枢电动势及电压平衡关系根据右手定则知,E和原通入的电流方向相反,其大小为:二、电枢绕组中电压的平衡关系7.2.4电磁转矩二、转矩平衡关系例:机械特性指的是电机的电磁转矩和转速间的关系,下边以他励和

电机学课件--直流电动机的电力拖动.ppt
第2章直流电动机的电力拖动§2.1§2.1.1电力拖动系统的运动方程式2、实用表达式通常将转动惯量J用飞轮矩GD2来表示,它们之间的关系为J=mp式中m与G-转动部分的质量与重量;p与D-惯性半径与直径(m);g=9.81m/s2-重力加速度;再将机械角速度用转速n表示可得:3、系统旋转运动的三种状态二、运动方程式中转矩正、负号的规定§2.1.2负载的转矩特性1.反抗性恒转距负载特性特点:TL的大小恒定不变,方向总是与运动方向相反。负载转矩特性在第一和第三象限,如图2.1所示,例如金属的压延,机床的平移机

拖动-直流电念头的起动、调速.ppt
直流电动机的电力拖动Te一、固有机械特性:当UN,ΦN,Rc=0时,β小,特性较硬。2.降低电压的人为机械特性:当ΦN,RΩ=0时,降电源电压。例:他励直流电动机PN=22kW,UN=220V,IN=115A,nN=1500r/min,Ra=0.125Ω,若保持TL,求⑴串Rc=0.75Ω,⑵降压U=100V,⑶Φ=0.85ΦN时的Ia和n。解:增垒突锌饲陇奥叼臭侈褒辉峨弘盎幽裹升战顷诡硬邓喳芋蜗晶跌闰蛮啊计拖动-直流电动机的起动、调速拖动-直流电动机的起动、调速8.2他励直流电动机的起动和反转起动过程:

【培训课件】电机学课件--直流电动机的电力拖动.pptx
直流电动机的电力拖动§1§1.1电力拖动系统的运动方程式2、实用表达式通常将转动惯量J用飞轮矩GD2来表示它们之间的关系为J=mp式中m与G-转动部分的质量与重量;p与D-惯性半径与直径(m);g=9.81m/s2-重力加速度;再将机械角速度用转速n表示可得:3、系统旋转运动的三种状态二、运动方程式中转矩正、负号的规定§1.2负载的转矩