
一种适用于狭小空间的转运机器人.pdf

是湛****21

1/6
2/6
3/6

4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种适用于狭小空间的转运机器人.pdf
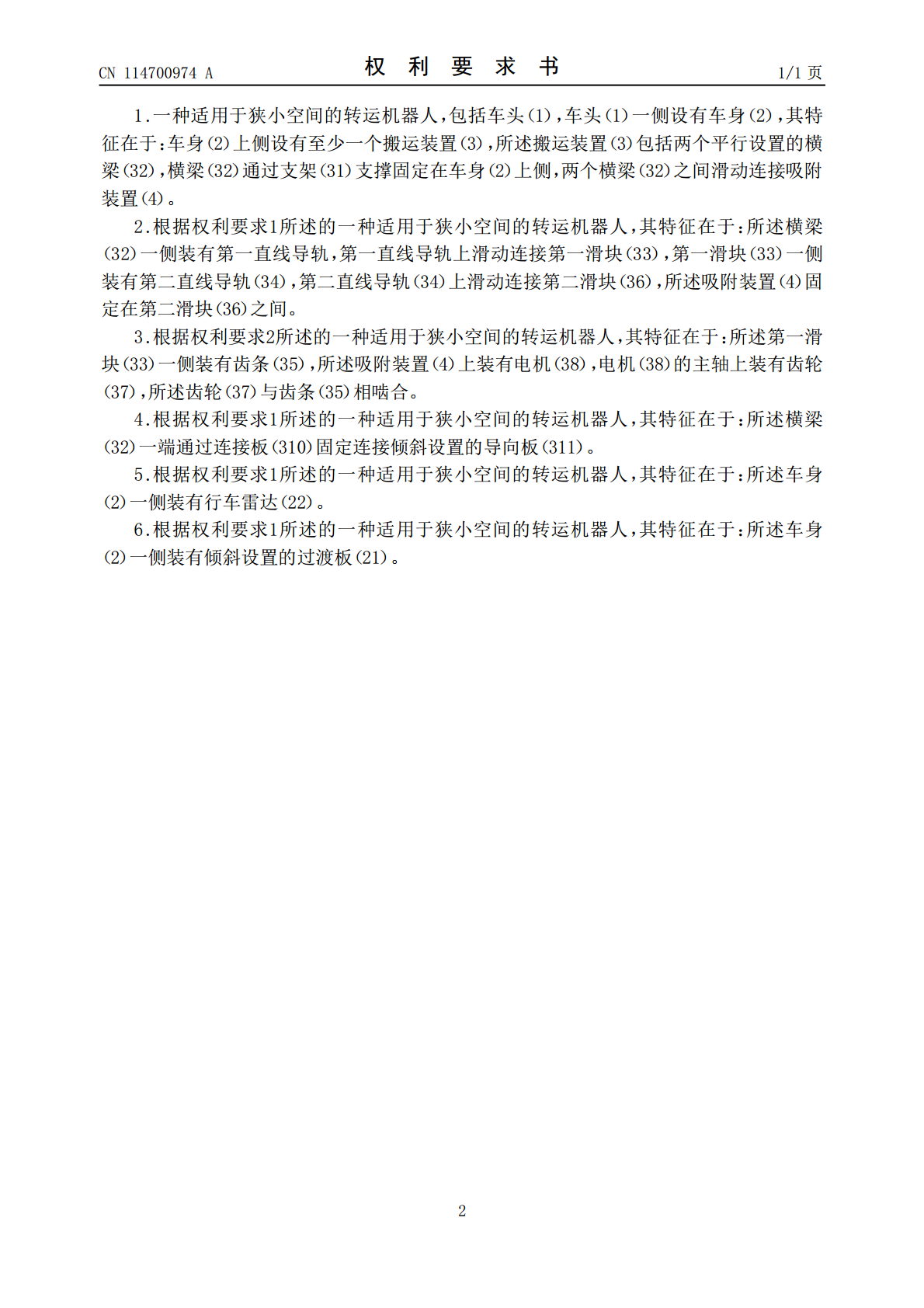
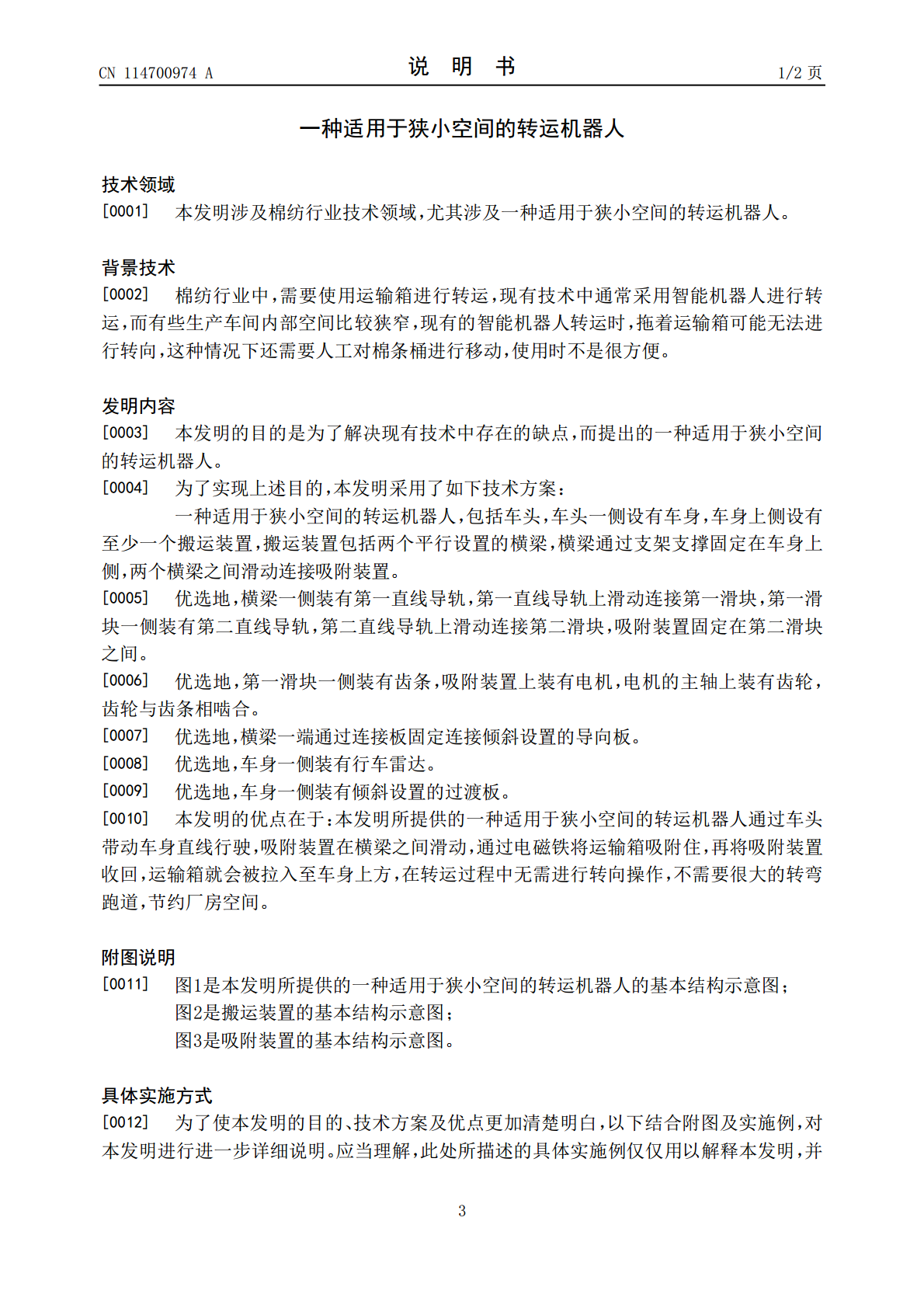
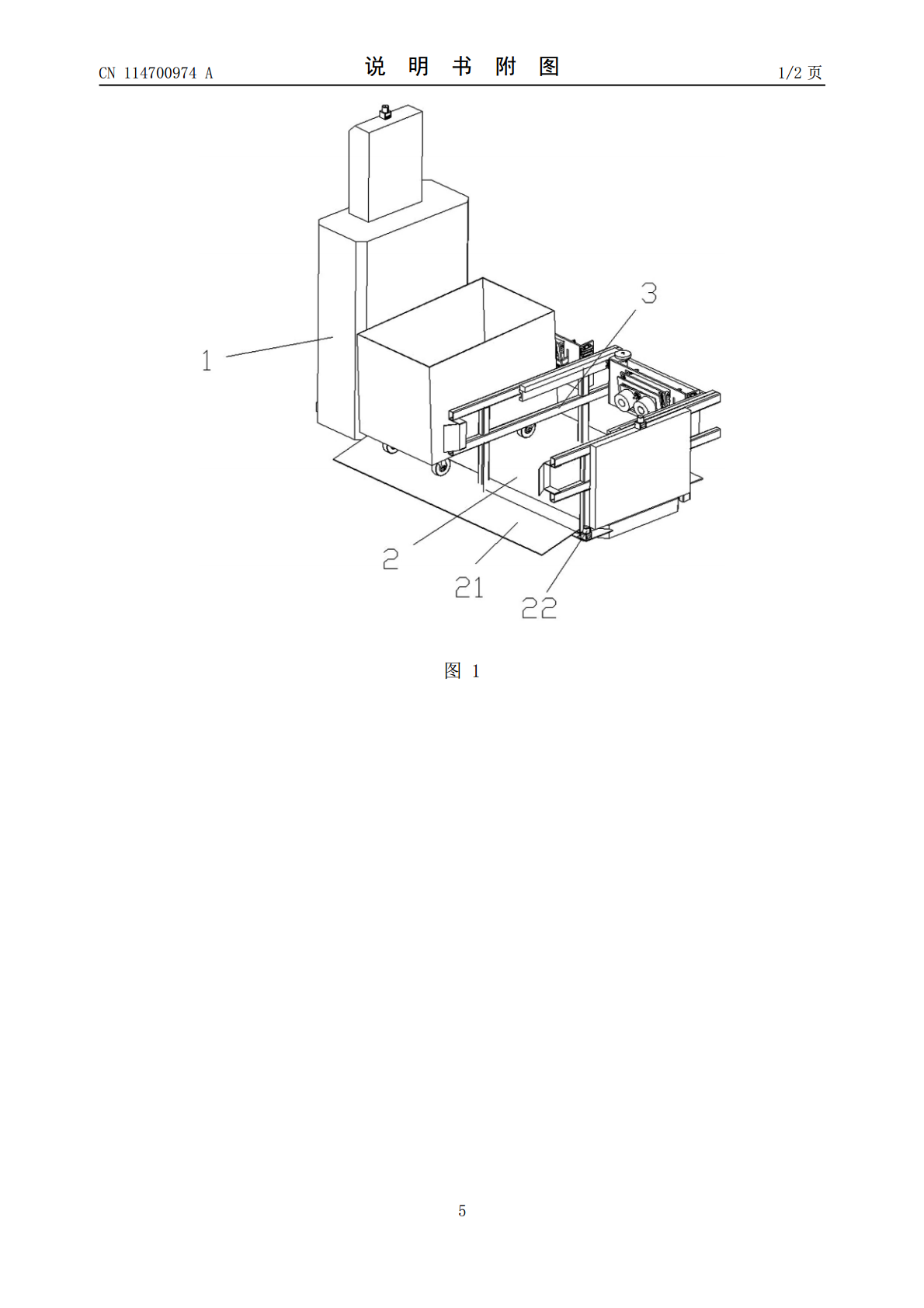
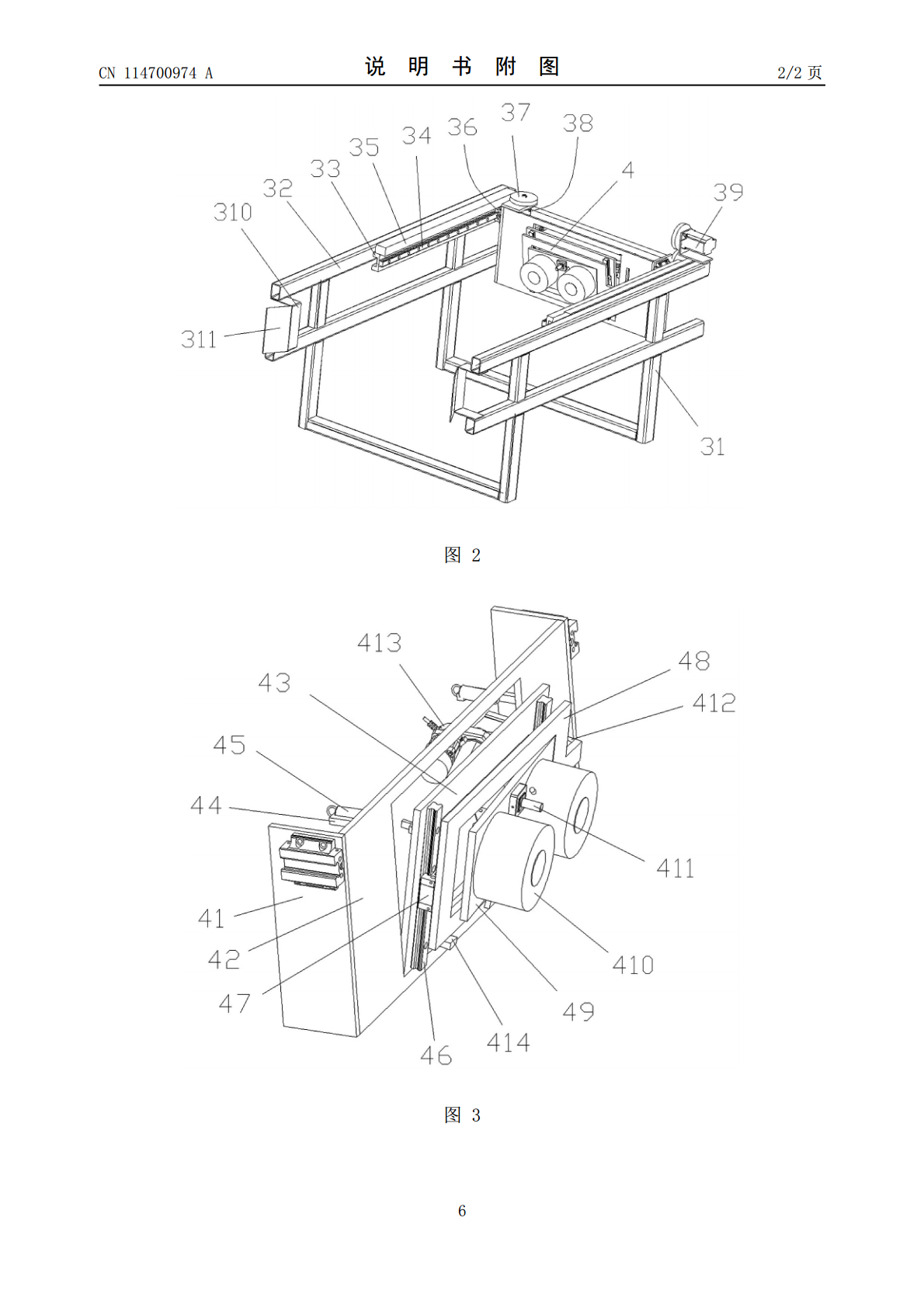
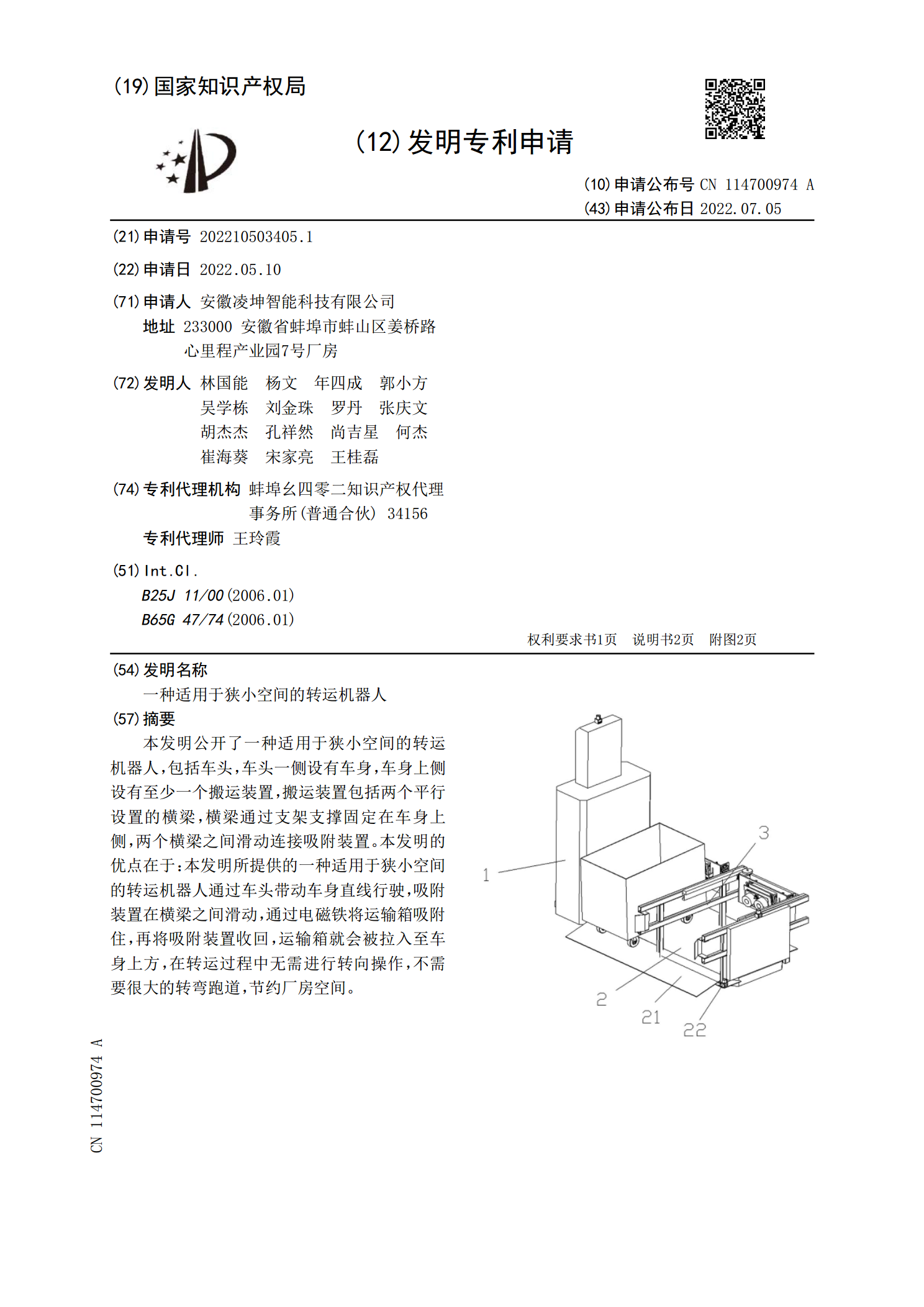
本发明公开了一种适用于狭小空间的转运机器人,包括车头,车头一侧设有车身,车身上侧设有至少一个搬运装置,搬运装置包括两个平行设置的横梁,横梁通过支架支撑固定在车身上侧,两个横梁之间滑动连接吸附装置。本发明的优点在于:本发明所提供的一种适用于狭小空间的转运机器人通过车头带动车身直线行驶,吸附装置在横梁之间滑动,通过电磁铁将运输箱吸附住,再将吸附装置收回,运输箱就会被拉入至车身上方,在转运过程中无需进行转向操作,不需要很大的转弯跑道,节约厂房空间。
一种适用于狭小空间的深井救援机器人及救援方法.pdf
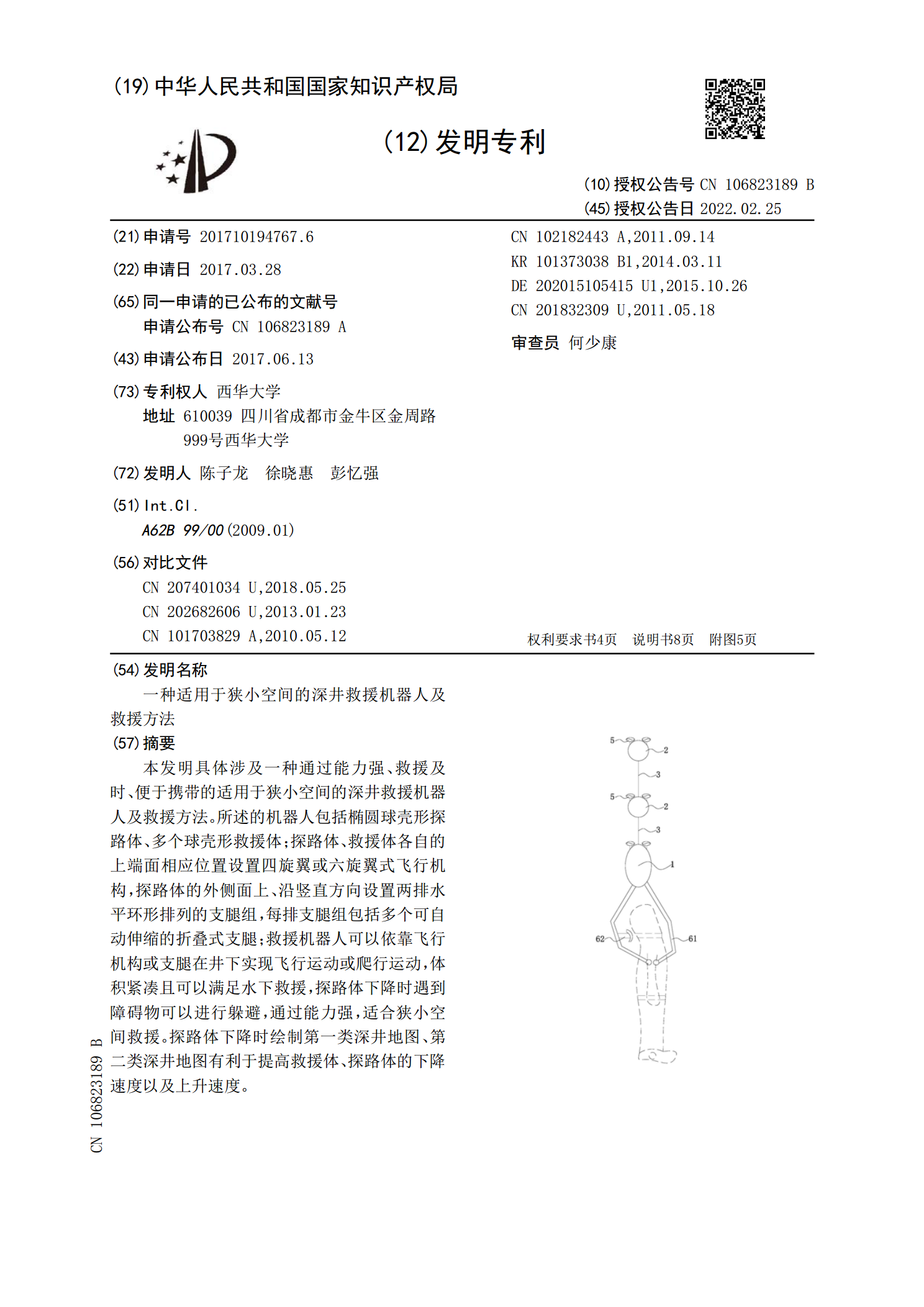
本发明具体涉及一种通过能力强、救援及时、便于携带的适用于狭小空间的深井救援机器人及救援方法。所述的机器人包括椭圆球壳形探路体、多个球壳形救援体;探路体、救援体各自的上端面相应位置设置四旋翼或六旋翼式飞行机构,探路体的外侧面上、沿竖直方向设置两排水平环形排列的支腿组,每排支腿组包括多个可自动伸缩的折叠式支腿;救援机器人可以依靠飞行机构或支腿在井下实现飞行运动或爬行运动,体积紧凑且可以满足水下救援,探路体下降时遇到障碍物可以进行躲避,通过能力强,适合狭小空间救援。探路体下降时绘制第一类深井地图、第二类深井地图
适用于狭小空间的深井救援机器人的智能救援方法.pdf
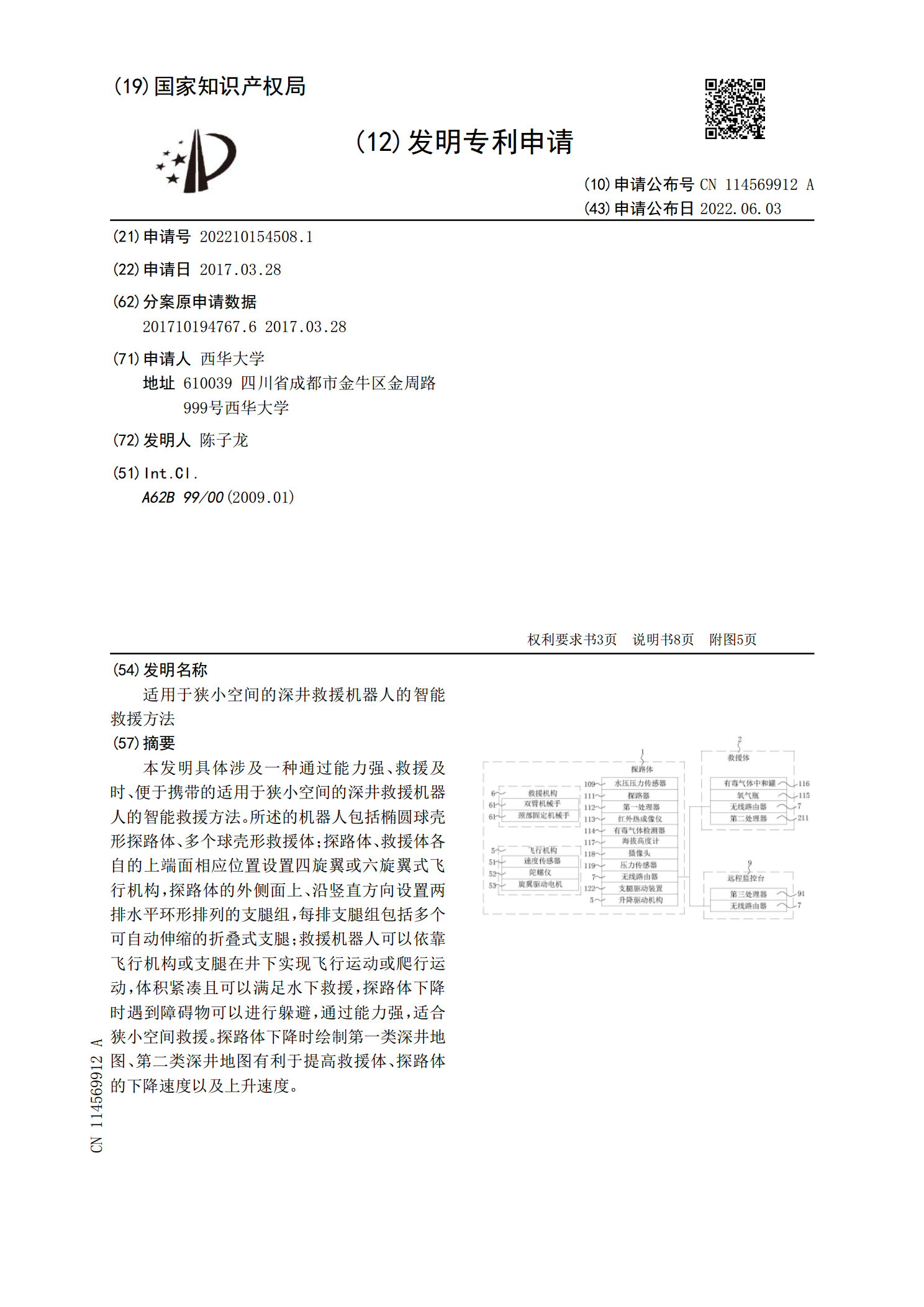
本发明具体涉及一种通过能力强、救援及时、便于携带的适用于狭小空间的深井救援机器人的智能救援方法。所述的机器人包括椭圆球壳形探路体、多个球壳形救援体;探路体、救援体各自的上端面相应位置设置四旋翼或六旋翼式飞行机构,探路体的外侧面上、沿竖直方向设置两排水平环形排列的支腿组,每排支腿组包括多个可自动伸缩的折叠式支腿;救援机器人可以依靠飞行机构或支腿在井下实现飞行运动或爬行运动,体积紧凑且可以满足水下救援,探路体下降时遇到障碍物可以进行躲避,通过能力强,适合狭小空间救援。探路体下降时绘制第一类深井地图、第二类深井
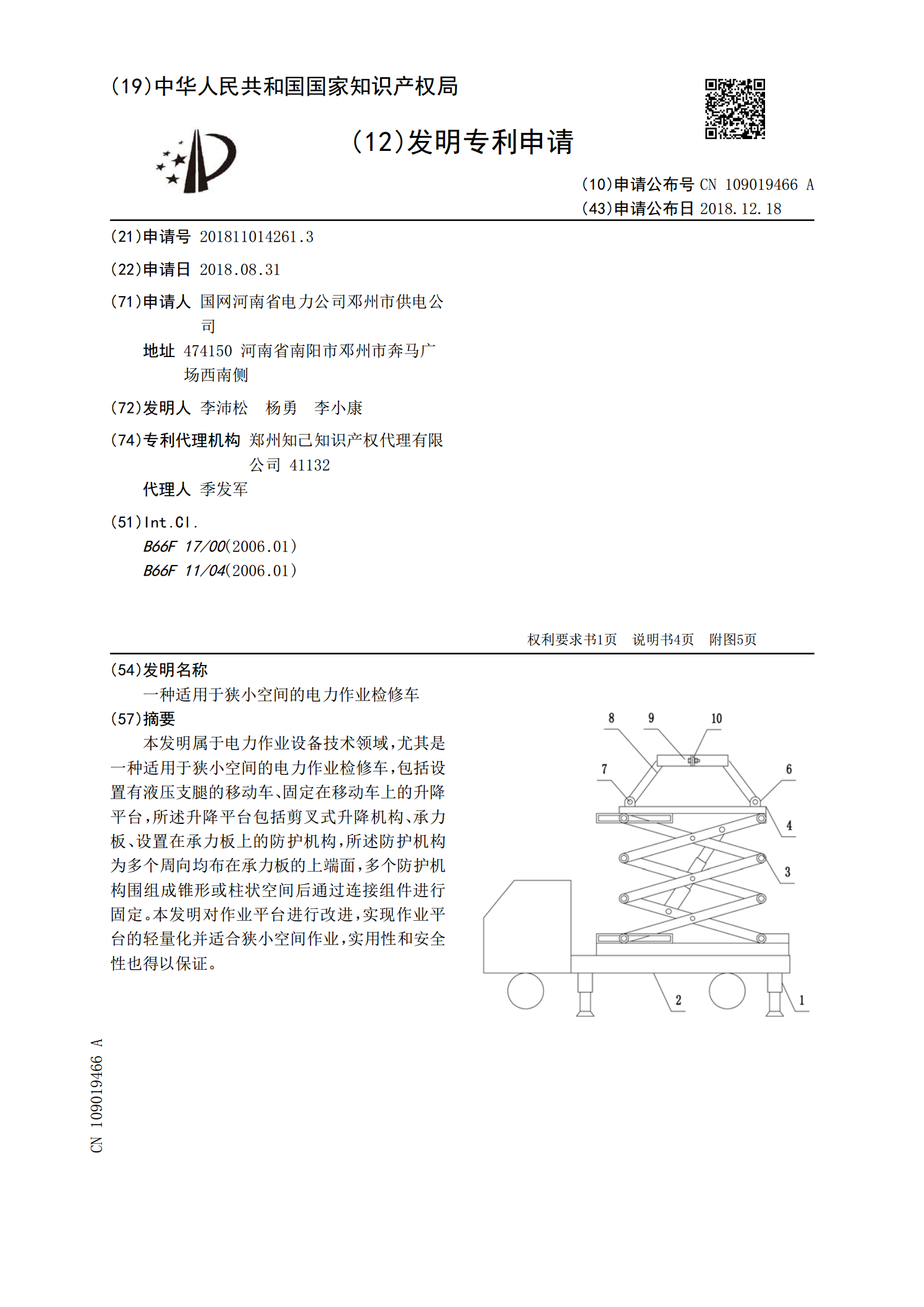
一种适用于狭小空间的电力作业检修车.pdf
本发明属于电力作业设备技术领域,尤其是一种适用于狭小空间的电力作业检修车,包括设置有液压支腿的移动车、固定在移动车上的升降平台,所述升降平台包括剪叉式升降机构、承力板、设置在承力板上的防护机构,所述防护机构为多个周向均布在承力板的上端面,多个防护机构围组成锥形或柱状空间后通过连接组件进行固定。本发明对作业平台进行改进,实现作业平台的轻量化并适合狭小空间作业,实用性和安全性也得以保证。
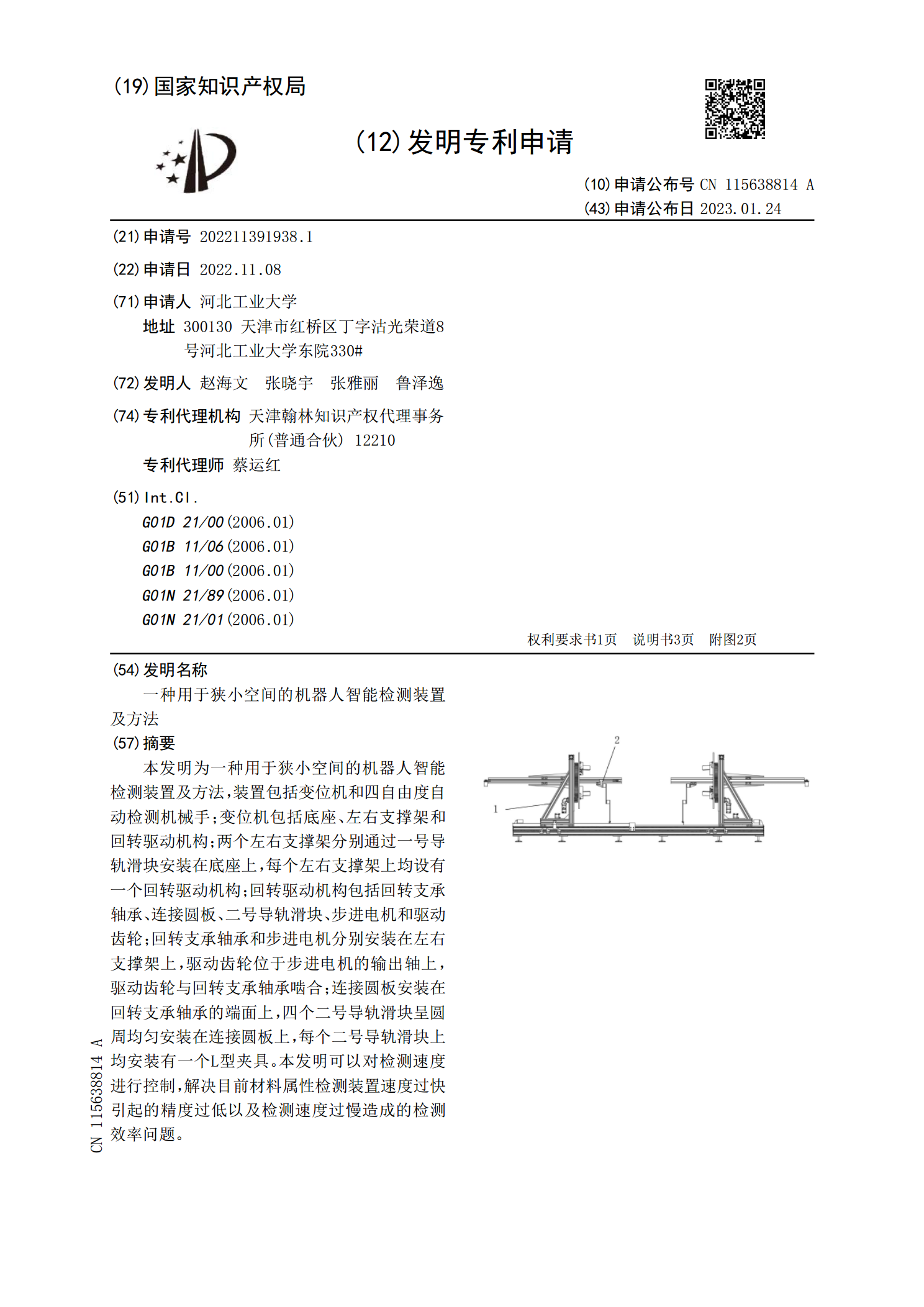
一种用于狭小空间的机器人智能检测装置及方法.pdf
本发明为一种用于狭小空间的机器人智能检测装置及方法,装置包括变位机和四自由度自动检测机械手;变位机包括底座、左右支撑架和回转驱动机构;两个左右支撑架分别通过一号导轨滑块安装在底座上,每个左右支撑架上均设有一个回转驱动机构;回转驱动机构包括回转支承轴承、连接圆板、二号导轨滑块、步进电机和驱动齿轮;回转支承轴承和步进电机分别安装在左右支撑架上,驱动齿轮位于步进电机的输出轴上,驱动齿轮与回转支承轴承啮合;连接圆板安装在回转支承轴承的端面上,四个二号导轨滑块呈圆周均匀安装在连接圆板上,每个二号导轨滑块上均安装有一