
一种风电塔筒作业机器人及作业方法.pdf

戊午****jj


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种风电塔筒作业机器人及作业方法.pdf
本发明涉及风力发电技术领域,公开了一种风电塔筒作业机器人及作业方法,包括支撑座、第一作业机构和第二作业机构;支撑座包括支撑横梁、第一支撑腿和第二支撑腿,第一支撑腿和第二支撑腿间隔安装于支撑横梁的底部,第一作业机构可上下移动地安装于第一支撑腿,第二作业机构可上下移动地安装于第二支撑腿。第一作业机构包括第一安装座、驱动扳手和第一套筒;第一套筒用于套住螺栓,驱动扳手用于向套住螺栓的第一套筒施加扭矩并拧紧螺栓。本技术方案提出的一种风电塔筒作业机器人及作业方法,便于解决现有螺栓检测及紧固装置设计难度大、装配成本高的
风电塔筒作业平台、作业平台安装方法、塔筒及风电机组.pdf
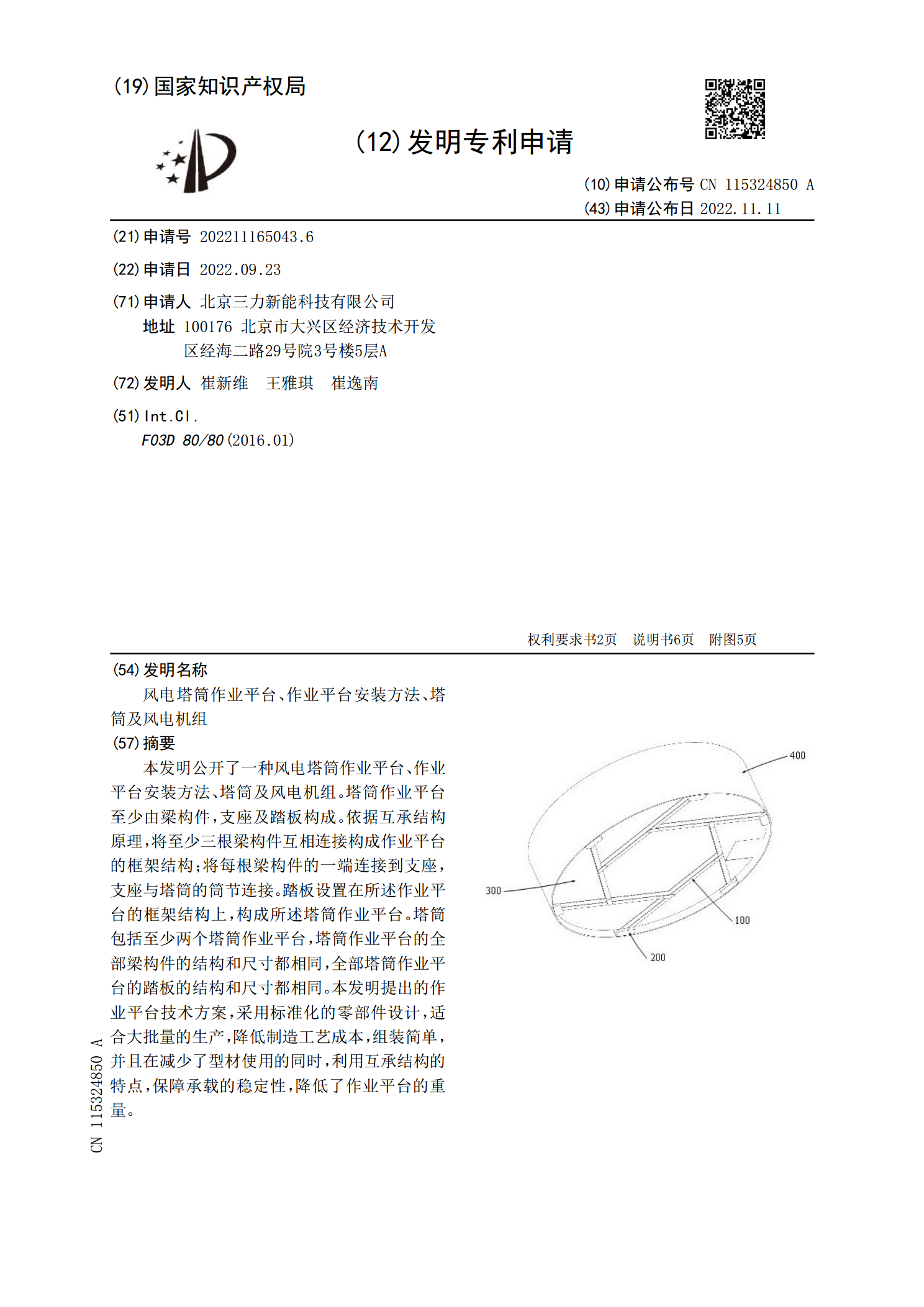
本发明公开了一种风电塔筒作业平台、作业平台安装方法、塔筒及风电机组。塔筒作业平台至少由梁构件,支座及踏板构成。依据互承结构原理,将至少三根梁构件互相连接构成作业平台的框架结构;将每根梁构件的一端连接到支座,支座与塔筒的筒节连接。踏板设置在所述作业平台的框架结构上,构成所述塔筒作业平台。塔筒包括至少两个塔筒作业平台,塔筒作业平台的全部梁构件的结构和尺寸都相同,全部塔筒作业平台的踏板的结构和尺寸都相同。本发明提出的作业平台技术方案,采用标准化的零部件设计,适合大批量的生产,降低制造工艺成本,组装简单,并且在减

风电塔筒维护机器人.pdf
本发明公开了一种风电塔筒维护机器人,该爬升机器人的塔筒上抱圈和塔筒下抱圈分别包括有数量相等的上抱筒板和下抱筒板;在抱筒板上安装有卷扬机,卷扬机的钢索缠绕于抱筒板的外侧;在上抱筒板和下抱筒板之间支承有爬升驱动装置,在上抱筒板和下抱筒板上安装有托承撑架,该托承撑架的托承横杆安装有维护台架;维护台架的台架上框架上移动支承有维护移动车,维护移动车的周向移动架上转动支承有周向滚轮,在周向移动架上滑动支承有径向移动架,在径向移动架上固定连接有竖向移动架,竖向移动架上滑动支承有竖向滑板;该周向、径向和竖向驱动装置均与机

一种风电塔筒清洁机器人.pdf
本发明涉及一种风电塔筒清洁机器人,包括可开合的机器人主体,机器人主体内侧转动安装有可与风电塔筒贴合且带动机器人主体沿风电塔筒上下移动的滚轮组件,机器人主体在滚轮组件上方固定有支撑架,支撑架上转动安装有清洁组件。本发明根据风电塔筒维护的实际情况而设计,省去磁性履带,不对塔筒表面形成二次损伤,且不需要吊索,使用更方便,清洁组件采用周布置,可绕塔筒中心转动,所以不需要调整作业角度位置,机器人只需沿塔筒上下行走即可完成清洁,清洁效率大大提高。

风电塔筒再制造方法.pdf
本发明涉及一种风电塔筒再制造方法,该方法首先,塔筒部件拆解,保留能用的部件,然后,检验合格组件,接着对塔筒筒体进行修复与加固,最后,再次对塔筒筒体进行100%超声波检测,检测合格后,将修复后的部件和替换的新部件进行装配,本方法修复周期短,成本低,可以有效延长风电塔筒综合使用寿命,提高设备利用率,降低风电塔筒寿命周期成本,减少对环境的危害。